1. 需求
手上的jetson nano机器使用的是lxde桌面(通常从台湾组装的jetson机器会有带有这种图标的界面,就是lxde界面,和gnome桌面差不多,但是有些设置不太一样),需要设置中文输入法。
2. 解决
主要参考博客《Jetson nano基础配置(更换源、安装中文输入法等)》。在该博客中,主要针对的是gnome桌面,对lxde桌面设置有细微差别。
2.1. 中文输入法安装包
ubuntu系统的,x86架构的安装搜狗输入法官网下的linux版本,搜狗输入法首页里面说可以支持arm架构,但是没有尝试。
这里我们主要使用参考博客里面的谷歌拼音。安装步骤如下。
sudo apt-get install fcitx fcitx-googlepinyin
2.2. 系统设置
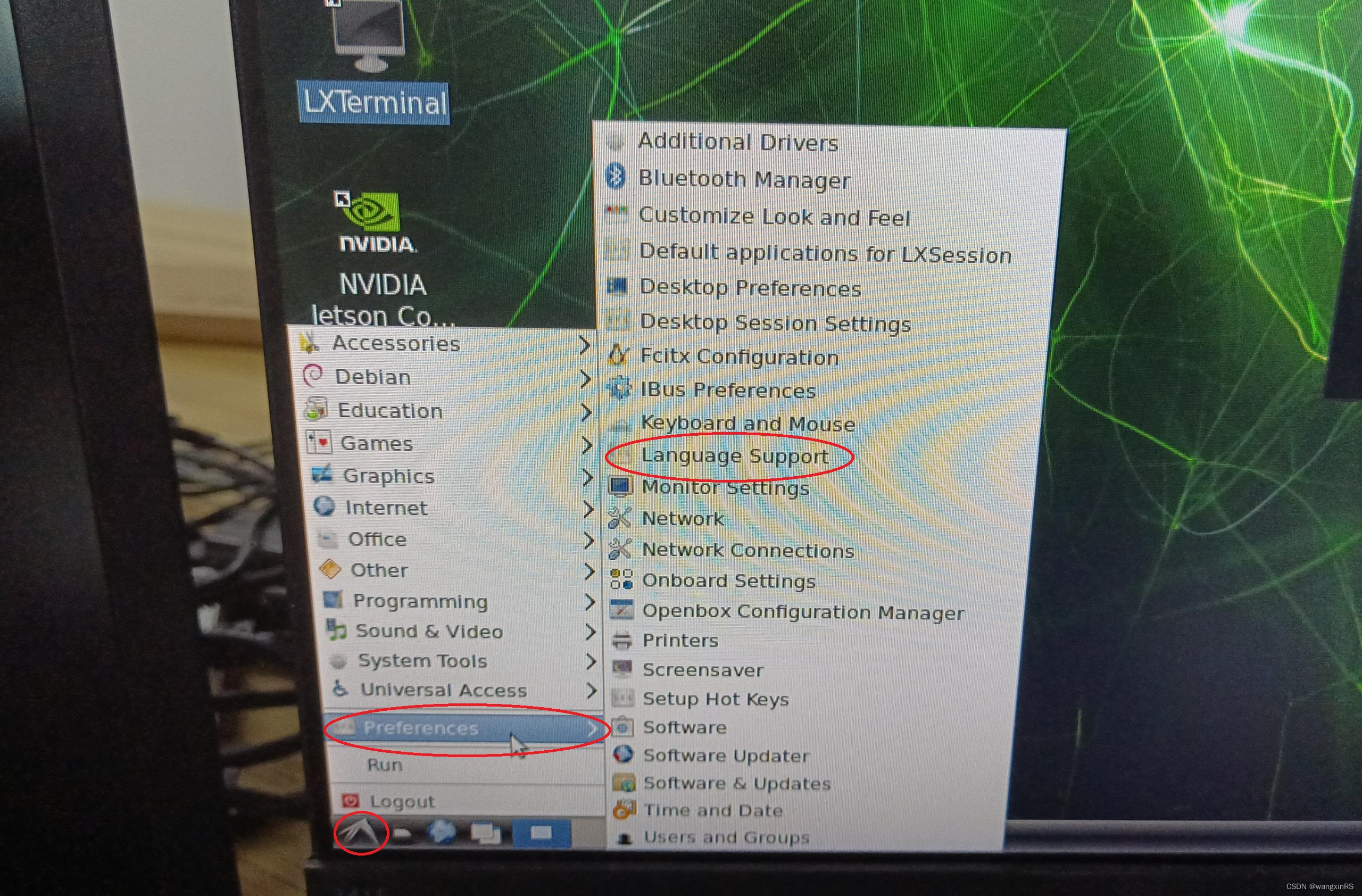
2.2.1. 安装包完成后,点击桌面左下角飞鸟图标,进入Preferences,找到Language Support,点击即可,如下图
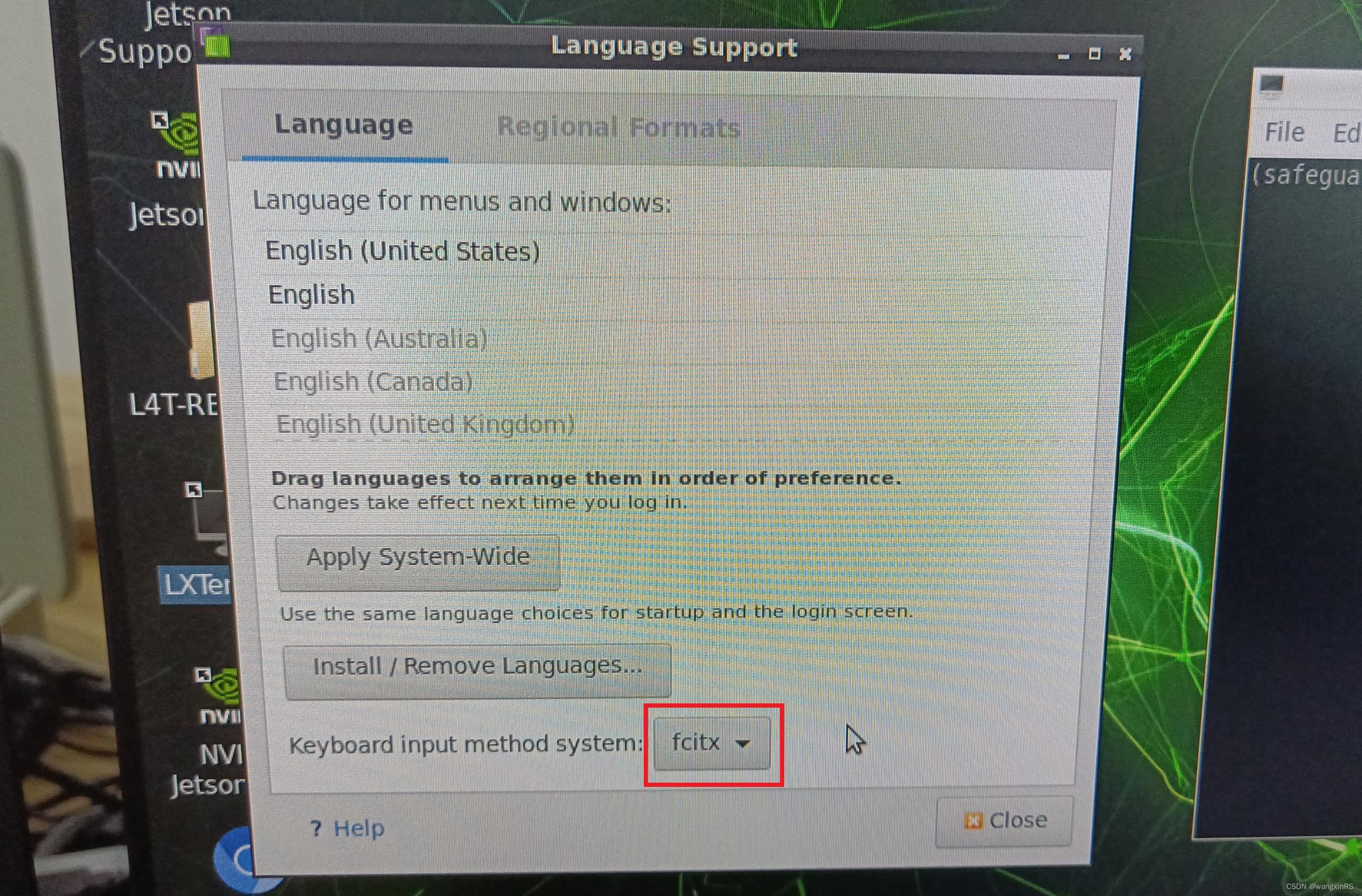
2.2.2. 点击进入后,会首先提示有部分库未安装,选择安装即可。安装完毕后,选中最下方的下拉框(Keyboard input method system),选择其中的fcitx,如下图,然后选择close关闭,然后重启系统。
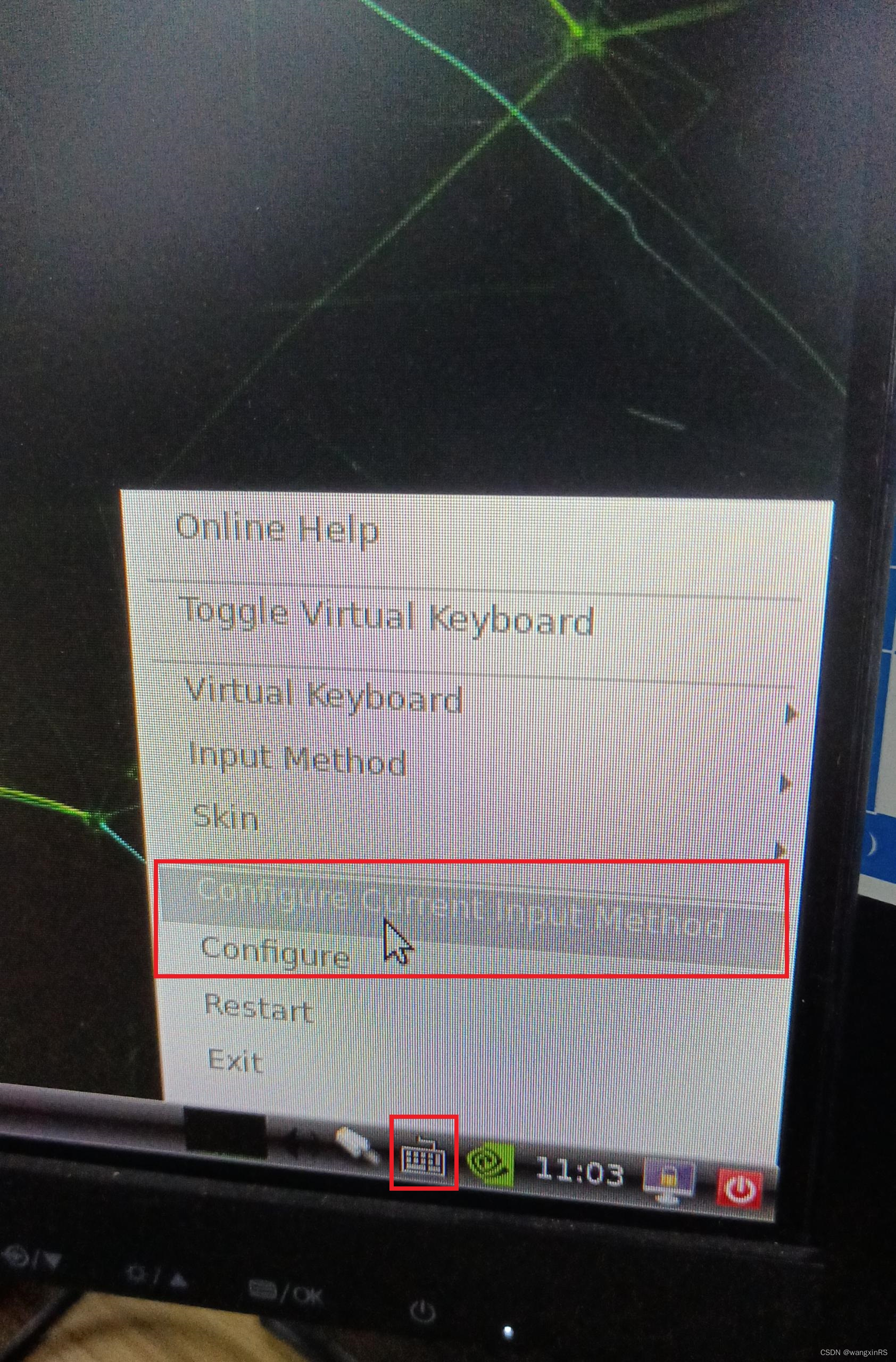
2.2.3. 待重启后,在桌面右下角,找到键盘图标,鼠标右键,选择Configure Current Input Method,如下图所示
进入Input Method Configuration配置界面,选择左下角的“+”,如下图所示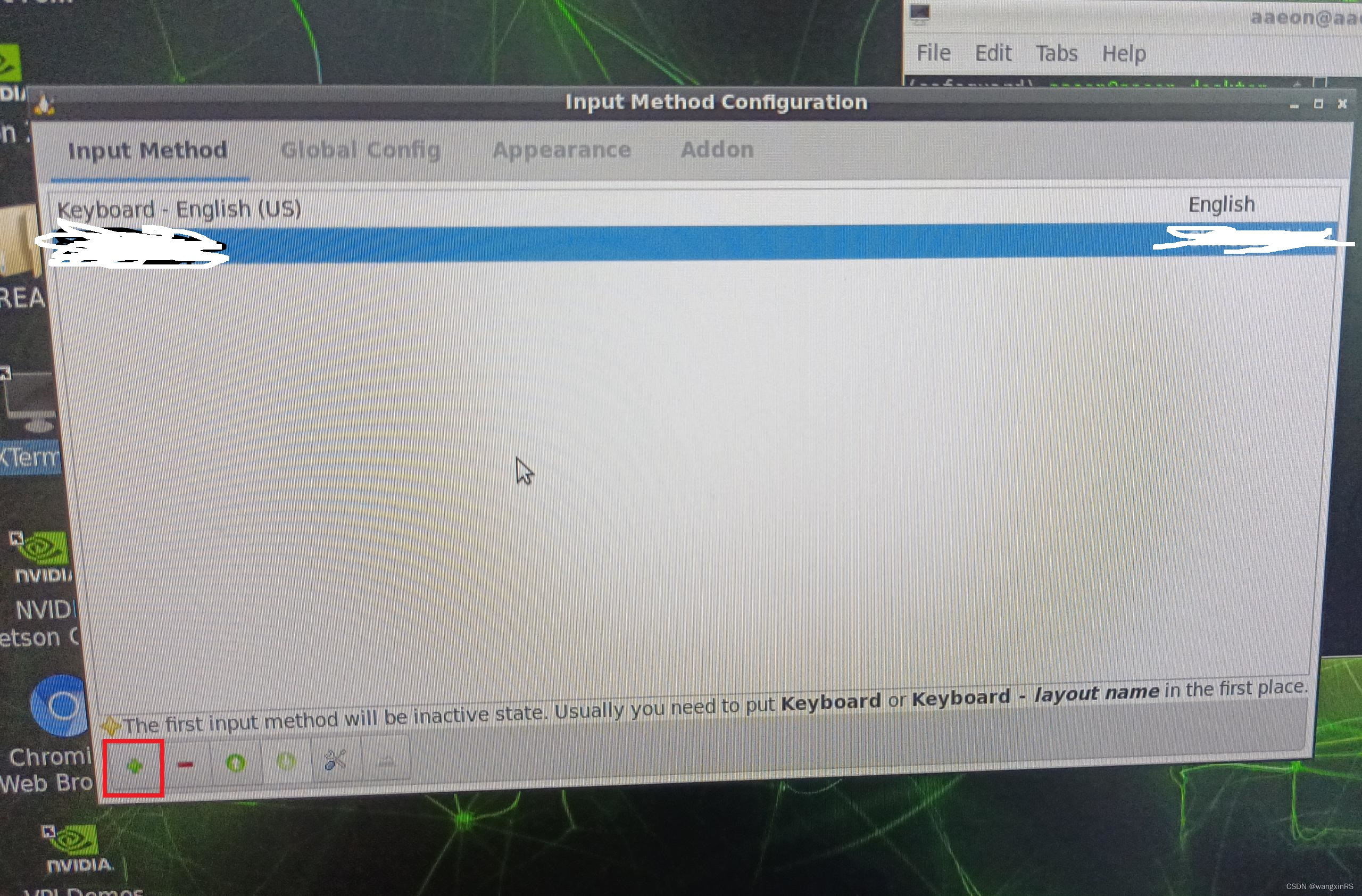
然后在弹窗里,将Only Show Current Language选项取消勾选状态,并在下方输入框里输入google,可以找到Google Pinyin选项,然后点击该选项,并点击OK即可,如下图所示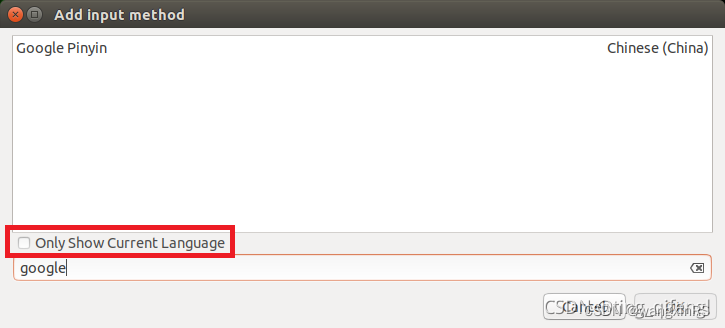
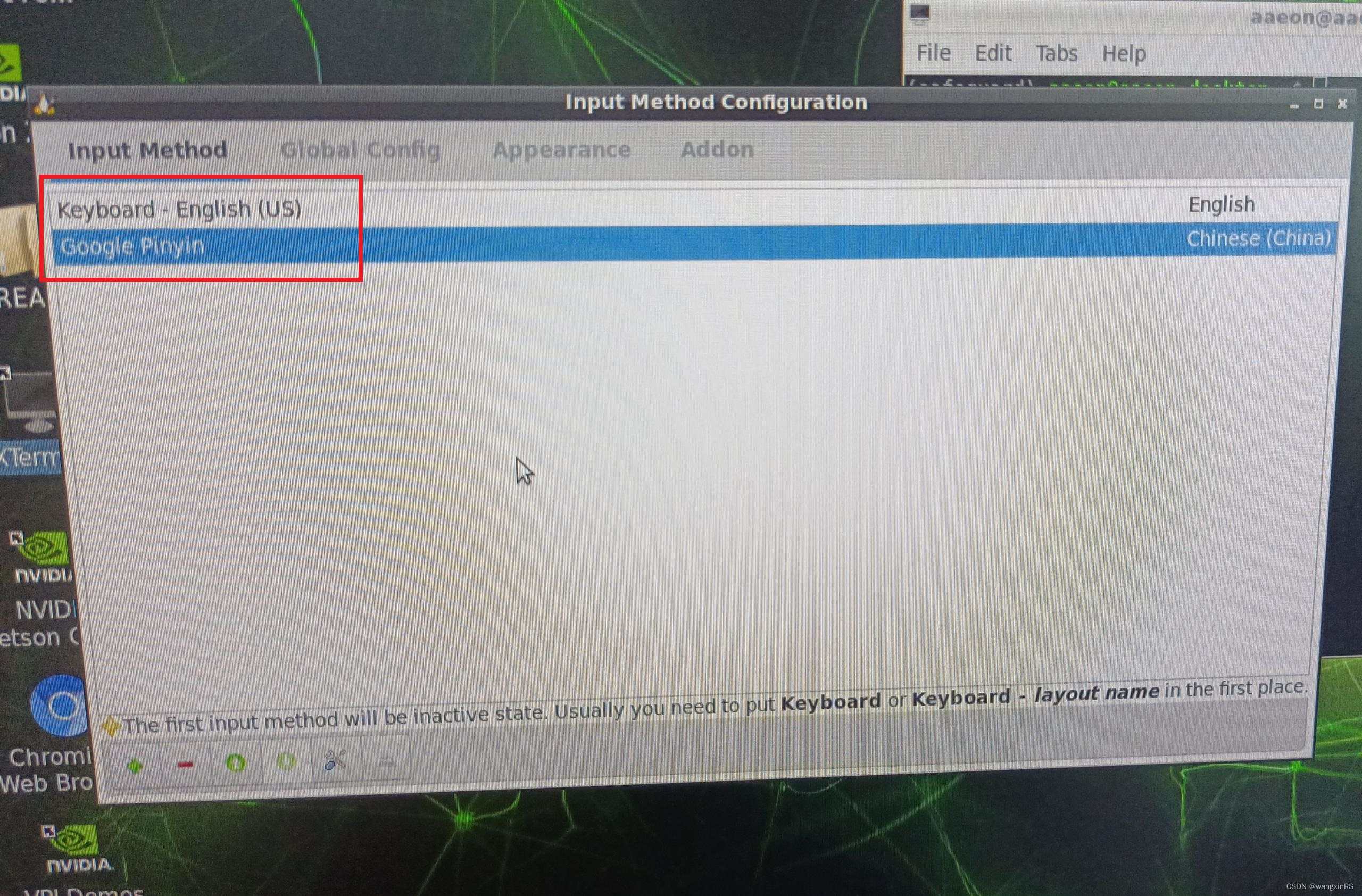
关闭该弹窗后,在配置界面应该如下
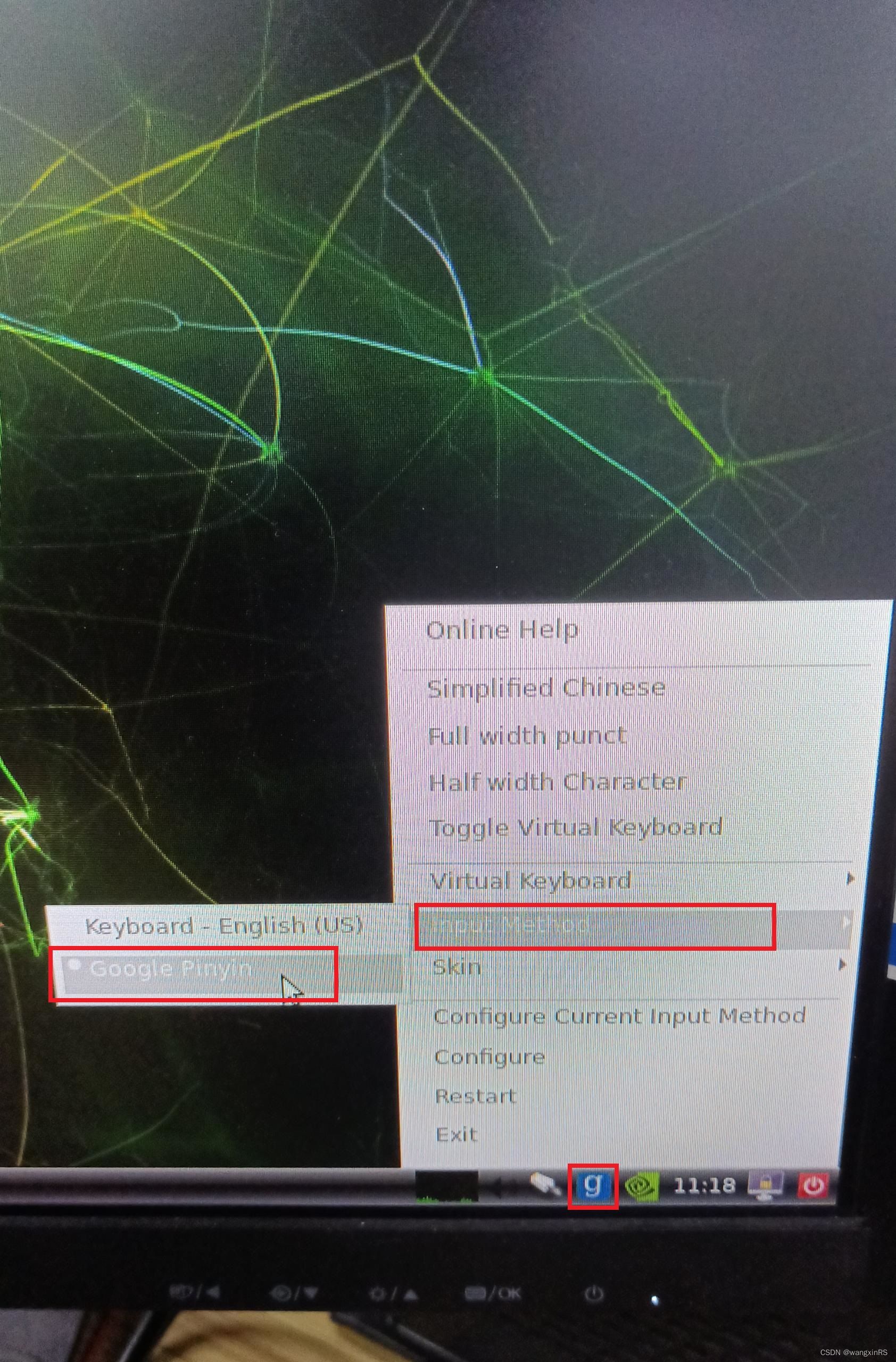
2.2.4 关闭上述配置界面后,依旧在桌面右下角找到键盘图标,鼠标右键,点击Input Method,点击Google Pinyin,即可切换到中文输入法,如下图所示
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)