目录
- 浅记XACRO And Gazebo仿真建模
- 一、XACRO
-
- 二、ROS_CONTROL
- ros_control是什么?
- 1.添加【惯性参数和碰撞属性】
- 2.添加【gazebo标签】
- 3.添加【joint传动装置】
- 4.添加【gazebo控制器件】
- 5.添加【机器人模型】
- 三、Gazebo物理环境设置
- 1.直接在gazebo中添加环境。
- 2.通过Building Editor插件
- 参考资料
浅记XACRO And Gazebo仿真建模
一、XACRO
URDF是机器人模型描述的统一格式,但是它却有很多缺点,比如
- 模型冗长,重复内容太多。比如机器人底盘的左右轮(下图代码的left_wheel_link和right_wheel_link),需要重复编写几乎一样的代码,导致重复代码过多,效率低下。
- 不便于参数修改和计算。由于没有宏定义,当需要修改模型的参数时,往往牵一发而动全身。另外,URDF也不能进行类似的参数计算。
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
为了弥补URDF格式的这些缺点,人们提出了改进版的URDF——XACRO格式。该格式很好地解决了URDF格式的不足,使得机器人的模型描述变得更加灵活和容易。其特点如下:
- 简化模型描述:创建宏定义和文件包含。
- 提供可编程接口:变量,常量,数学计算,条件语句等。
1.【常量定义】
<xacro:property name="M_PI" value="3.1415926"/>
通过xacro:property属性定义了一个名为“M_PI”的常量,其值为"3.1415926"。
【常量使用】
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
常量的使用方法采用美元符==$+{}==的形式来调用。
2.【宏定义】
<xacro:macro name="name1" params="a b c">
......
</xacro:macro>
【宏调用】
<xacro:name1 a="xxx" b="xxx" c="xxx" />
这里需要注意的是,从ubuntu20.04开始,xacro的宏调用需要在宏名前添加前缀xacro:,否则模型不能在rviz中正常显示。
3.【文件包含】
<xacro:include filename="$(find mbot_description)/urdf/mbot_base_gazebo.xacro" />
为了便于模块化管理,xacro提供了文件包含的功能。这样就可以在不同的文件中对不同的部件进行建模,最后在通过文件包含进行整合。
二、ROS_CONTROL
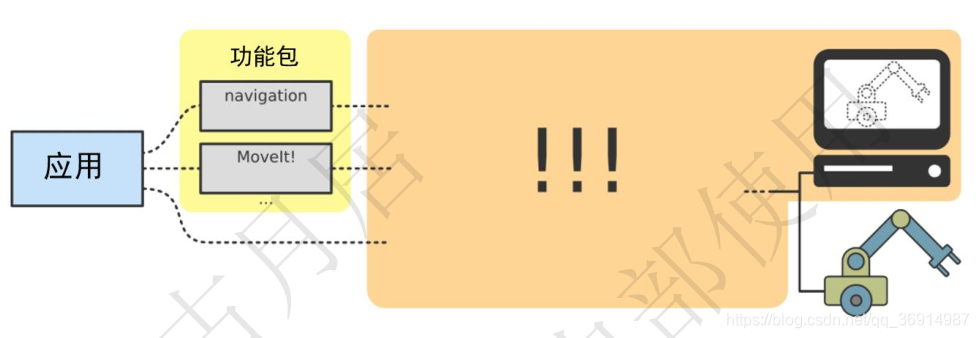
有了xacro,我们便有了机器人描述模型。那么如何控制机器人进行一系列的物理仿真呢?这里就得引出ros_control和gazebo了。
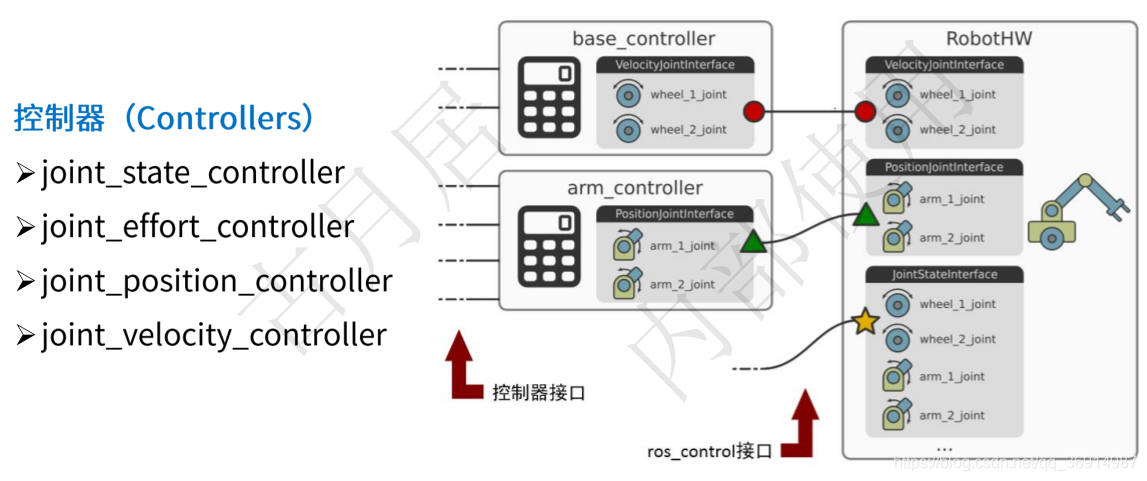
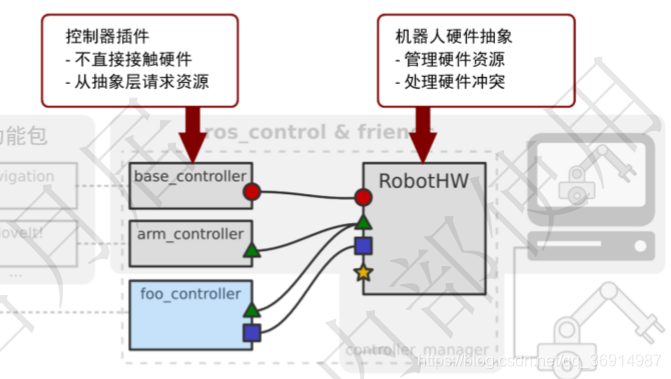
ros_control是什么?
顾名思义,ros_control就是ROS官方为开发者提供的机器人控制中间件,其中包含一系列的控制器接口、传动转置接口、硬件接口和控制器工具箱等,以便ROS可以控制我们的底层物理器件,如摄像头、电机,激光雷达等。
既然要让机器人进行物理仿真,那么如何让我们的机器人具备物理属性呢?
答案是通过gazebo标签!
1.添加【惯性参数和碰撞属性】
我们知道,机器人的模型描述中有两个属性至关重要,那就是刚体(这里不涉及柔性器件)的惯性参数和碰撞属性。
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
<xacro:cylinder_inertial_matrix m="${wheel_mass}" r="${wheel_radius}" h="${wheel_length}" />
这里通过collision标签定义了link的碰撞属性,接着通过调用定义好的惯性矩阵宏来配置link的惯性参数。
2.添加【gazebo标签】
<gazebo reference="${prefix}_wheel_link">
<material>Gazebo/Gray</material>
</gazebo>
通过添加gazebo标签,我们就可以将我们的模型在gazebo仿真环境中打开,reference定义了link的名字,material定义了link在gazebo中的颜色属性。
3.添加【joint传动装置】
joint是指机器人的关节,link的运动起决于对应关节的转动。目前仿真模型中的关节还不具备传动属性,所以我们需要为其添加传动属性。
<transmission name="${prefix}_wheel_joint_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${prefix}_wheel_joint" >
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${prefix}_wheel_joint_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
在transmission标签中,我们需要设置传动接口类型type,这里设置的是简单类型;传动节点joint及其硬件接口hardwareInterface,这里设置的是速度接口;执行器actuator的硬件接口需要和上面设置的接口类型一样;设置传动比mechanicalReduction,这里设置为电机转一圈,轮子也转一圈。
4.添加【gazebo控制器件】
为了能够在gazebo中进行物理仿真,我们还需要在xacro中添加gazebo控制器件。该控制器件主要包括一些机器人的命名空间,轮子的状态,消息,尺寸,转矩,加速度,里程计数据等。
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel_joint</leftJoint>
<rightJoint>right_wheel_joint</rightJoint>
<wheelSeparation>${wheel_joint_y*2}</wheelSeparation>
<wheelDiameter>${2*wheel_radius}</wheelDiameter>
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic>
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic>
<robotBaseFrame>base_footprint</robotBaseFrame>
</plugin>
</gazebo>
5.添加【机器人模型】
最后一个步骤,在launch启动文件中加载我们的gazebo模型,并设置好相关参数。
<launch>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/mbot_gazebo.xacro'" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
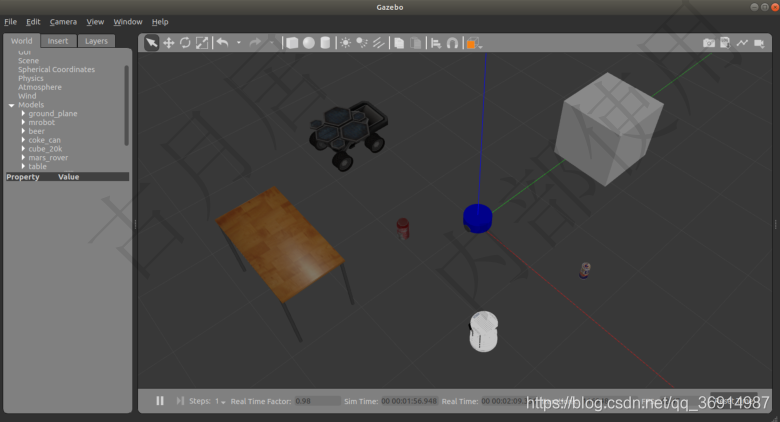
运行launch文件,便可以看到我们的gazebo模型啦!
三、Gazebo物理环境设置
1.直接在gazebo中添加环境。
这通常需要我们提前从gazebo官网下载好离线模型到本地的.gazebo/models路径下,然后便可以通过鼠标直接在gazebo仿真环境中添加我们想要的模型。
2.通过Building Editor插件
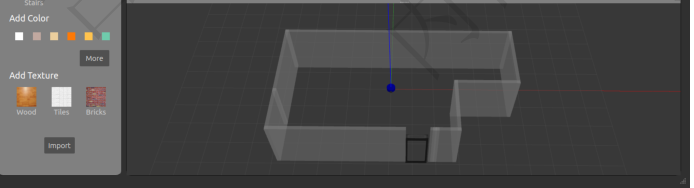
通过building editor我们可以在gazebo环境中添加墙壁,门,窗户等模型,来构造我们的物理仿真环境。
参考资料
古月学院
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)