祁子禹
引言
在奔逸不羁的童年,笔者对理科知识的好奇无际无边。某天曾在外婆家的煤棚子里一通乱翻,缴获了大舅学生时代的几何光学课本,不料遭遇开幕雷击:
“人的眼球好比照相机,我们要为革命而保护视力!”
对于一个孩童干瘪的脑袋来说,实在是难以领悟眼球和相机有何关联,也就更别提它们如何跟革命扯到一起了。时隔多年,笔者当物理学家的童年梦想未果,而是成为了一名脑外科医生。有了医学专业背景再回想,觉得书上这话讲得还算不孬——两只眼球属实如同两枚相机,乖巧而警觉地伏于眶窝内,可调光轴(眼外肌),可调焦距(睫状体)、可调光圈(瞳孔),既有底片(视网膜),又有电缆(视神经),最后把照片发给主机(大脑)。大脑整合双眼图像,分析差异,计算出物体到眼球的距离与深度。这些信息加上日积月累的视觉经验,便造就了双目立体视觉,使人看到立体的世界。
归纳逻辑推理告诉我们:欲谋取对事物的完整理解,要把问题一般化,还要把问题特殊化。上一段文字从眼球与相机的关系中抽象出了双目立体视觉的概念,是问题一般化。而问题特殊化是反向过程,即从双目立体视觉的概念反观眼球与相机的比喻,便可总结事物的关键部分和次要部分,专注于分析与科学问题关联最大的因素。
场景的简化版显而易见——空间中有一物体,双眼正注视着这个物体,产生两幅图像。大脑分析处理两幅图像,造就了双目立体视觉。前人正是通过双眼看世间万物这个模型,抽象出了对极几何的数学概念。本文从眼球-相机的比喻出发,聊聊笔者对对极几何中的四个重要矩阵,即外参矩阵、内参矩阵、基本矩阵和本质矩阵的直观理解。
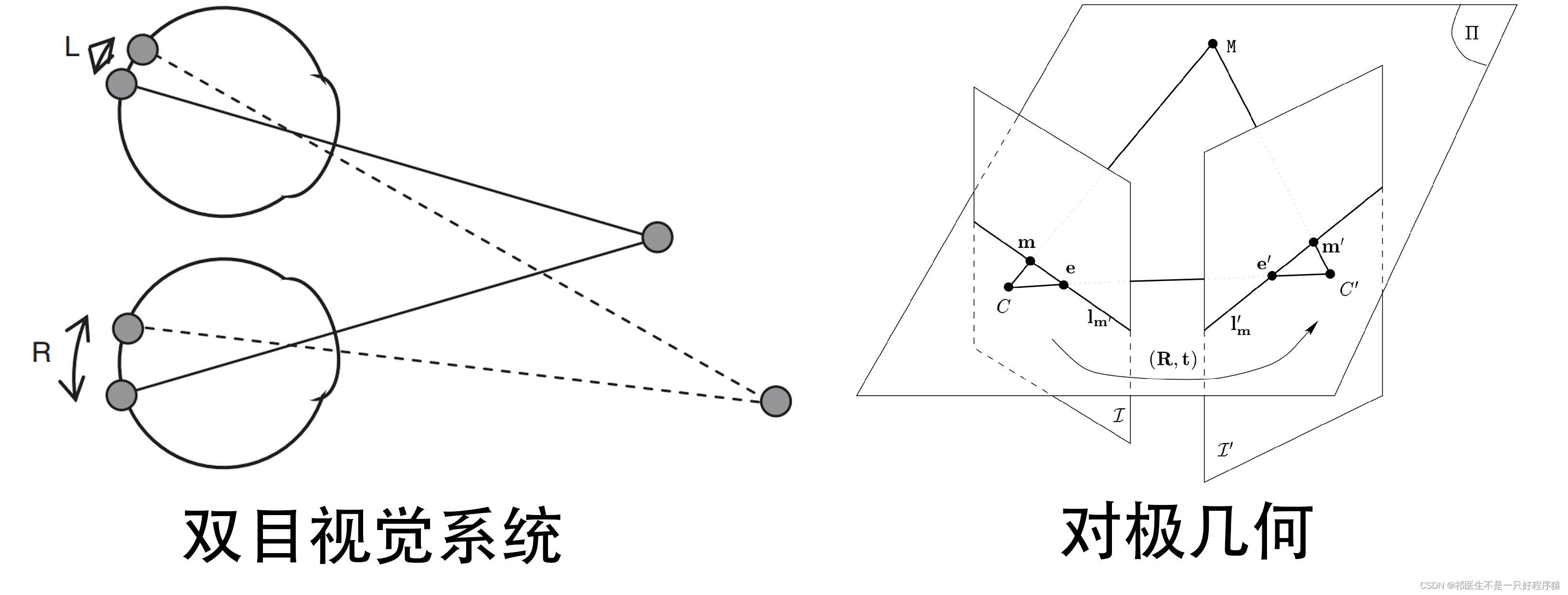
注:左图引自Read, J. C. (2015). Stereo vision and strabismus. Eye, 29(2), 214-224. 右图引自Zhang, Z. (1998). Determining the epipolar geometry and its uncertainty: A review. International journal of computer vision, 27, 161-195.
1. 外参矩阵(Extrinsic Matrix)
在真实世界中,物体有它的绝对位置和朝向——它的经纬度坐标,是面朝南还是面朝北。而在人眼中,该物体也有它的相对位置和朝向——它距离眼球多远,是面向人还是背朝人,正如诗所云“横看成岭侧成峰”。
物体的位姿从人的单眼变换到世界,就是外参矩阵所代表的变换。因此,左眼有左眼的外参矩阵,右眼有右眼的外参矩阵。
当物体相对于人眼发生线性变换时,外参矩阵随之改变。线性变换可以是平移(行驶的汽车),可以是旋转(转动的陀螺),可以是放缩(萎泄的皮球),也可以是仿射(斜阳之下的树影)。
术语总结:外参矩阵定义了相机坐标系和世界坐标系的关系,它是从相机坐标系转换到世界坐标系的变换矩阵。
2. 内参矩阵(Intrinsic Matrix)
外参矩阵描述了从世界到眼球的变换,内参矩阵则描述了从眼球到视网膜的变换。
眼球坐标系中的物体是三维的,而视网膜上的(实)像是二维的,因此,内参矩阵是一种从三维到二维的投影变换。投影变换的基本原理是:光在均匀透明的介质中沿直线传播。这也是几何光学体系的基本假设。因此,只要同时控制光源的位置、光的方向及其传播介质恒定不变,那么光路一定是确定的,实像的位置和大小将仅仅取决于光屏的位置和方向。
返回眼球的举例上来,只要使物体的位姿恒定,使人眼的位姿也恒定,那么这只眼球所看到的画面将永远是同一张画面。换言之,一个物体在一只眼球中有且只有一个确定的实像。
所以,每只眼球都必然存在唯一确定的变换矩阵,它使得物体与实像能够一一对应。这个矩阵就是内参矩阵,它反映了眼球的固有折光参数,因此又称“固有参数矩阵”
然而,不同人眼球不同,有人近视,有人远视,有人散光,有人斜视。所以,即便让他们的眼球都在同一位置观察同一物体,所看到的画面也很可能不同——正常人看到的清晰的物体,近视和远视的人说模糊,散光的人说有变形,斜视的人觉得歪曲,晶体被摘除的人说呜呜呜你们在说什么我怎么听不懂啊?换言之,不同眼球的内参矩阵不尽相同,内参矩阵取决于眼球的视轴、折光率、前后径等固有参数。
术语总结:内参矩阵定义了相机的内部参数,它记录了焦距、主点偏移等参数。对于定焦相机而言,内参矩阵是恒定的,在相机标定过程中需要求出。
3. 基本矩阵(Fundamental Matrix)
外参矩阵和内参矩阵概念,都以单只眼球举例,最初也都来源于位于单目视觉的范畴。前文提到双目立体视觉的基础是:大脑可以分析左右眼看到同一物体有何差异。而描述左目图像和右目图像之间变换关系的,就是基本矩阵。
这种变换关系是线性的吗?答案是肯定的。从物体到左目图像发生了线性变换,从物体到右目图像也发生了线性变换,那么,物体、左目图像与右目图像必然能在同一线性空间中描述,从左像到右像的变换也显然是线性变换。
变换是线性的,也就意味着点在左右图片中是一对一的映射,绝不会存在左图中有一个点对应着右图中的两个点。否则就会出现荒谬至极的情况——一个土豆摆在一个视力正常的人面前,他左眼看到一个土豆,右眼却看到了两个土豆。
因此,基本矩阵反映了左右视网膜上图像中的点的对应关系,这种关系可以通过几组对应点的位置,构成线性方程组来求解。
与内参矩阵的情形相似,不同人双眼的基本矩阵也不同,双目的距离(瞳距)就是一个典型的影响因素。精于推理的读者朋友可能马上会有以下疑问:是不是瞳距越大的人,感受视差的能力越强,立体感越好?笔者作为脑外科医生并不清楚,实难回答。那么,拥有眼科专业背景的读者朋友们,你们怎么看?欢迎在下方评论区留言赐教!
术语总结:基本矩阵关系了左目图像和右目图像中对应点的关系,可以用于确定双目相机系统的几何结构,以及确定视差。
4. 本质矩阵(Essential Matrix)
除瞳距外,人们在双眼焦距、光轴、折光性上的差异也会影像左目图像与右目图像的差异。凝练来说,基本矩阵除了受到双眼几何关系制约,还受到眼球固有参数的影响。本质矩阵是在基本矩阵的基础上,排除眼球固有参数的影响,而仅仅保留双眼的几何关系。正是基于这个推理,本质矩阵可以通过基本矩阵和内参矩阵求得。
如果说基本矩阵反映的是左目图像与右目图像的变换,那么本质矩阵反映的则是左眼球与右眼球的变换。将眼球位置和姿态简化为一个有朝向的质点,那么从左质点到右质点位姿的变换,正是本质矩阵所表征的。
前文多次提到斜视,那么什么是斜视呢?如果视力正常者的双眼去追踪一个运动物体,那么他两只眼球的联合转动理应协调一致。假如一些病理性因素(如眼肌损伤、眼球畸形、眶内炎症、颌面骨折等)会破坏这种联合运动的协调性,就会形成视觉障碍,斜视患者不得不通过歪斜的眼位来补偿这种不一致。在临床上,眼科医师们为斜视患者实施的矫正手术,也正是修复了患者左右眼之间的“本质矩阵”,从而使这个矩阵在追踪物体时总是协调一致,流转自如。
术语总结:本质矩阵是基本矩阵和内参矩阵的函数,它记录了两个相机坐标系的相对关系。本质矩阵可以用于计算相机的位姿,以及三维点的深度。
总而言之,外参矩阵、内参矩阵、基本矩阵、本质矩阵总是相互关联的,无论是在单目系统还是在双目系统,无论是从物体到眼球,还是从眼球到视觉图像。
写在最后
基础科学如数学,常常从抽象走向另一个抽象,而应用科学如工学,却是于抽象与具体间“其中往来种作”。众多科普文章则是通过创造性的诠释与表现,将科学知识呈现得更加生动、直观、有趣,避免理论被复杂的抽象所架空,最终疏远大众与科学的距离。本文乃笔者一己之思,全文无一公式,仅供读者朋友们参考,若能抛砖引玉,甚至使“黄发垂髫并怡然自乐”,实乃笔者之幸!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)