修改mavros中话题的发布频率
参考链接及命令分析
参考了以下文章的提高mavros中提高IMU话题频率的方法,再通过其介绍推出其他话题的频率修改方法
提高mavros中IMU话题的发布频率
修改命令的含义分析
作者提到了以下话题的修改方法:
- 原始IMU数据话题
/mavros/imu/data_raw。 - 飞控计算过后的IMU数据
/mavros/imu/data。
修改命令分别为:
rosrun mavros mavcmd long 511 105 10000 0 0 0 0 0
rosrun mavros mavcmd long 511 31 10000 0 0 0 0 0
通过比较以上两条命令,发现511应该是修改频率的一个命令,105和31是需要修改的话题所对应的数字,而这个数字应该可以查到对应的话题,10000是对应的时间间隔,间隔为10000us对应100hz。后面的5个0所对应的含义不清楚,需要通过官网查询。那现在的关键问题是去哪个网站查询。
MAVLink官网命令含义查询
经过某度、某应等多个搜索引擎查询,最后锁定了MAVLink官网。
各数字含义
511的含义如下图:
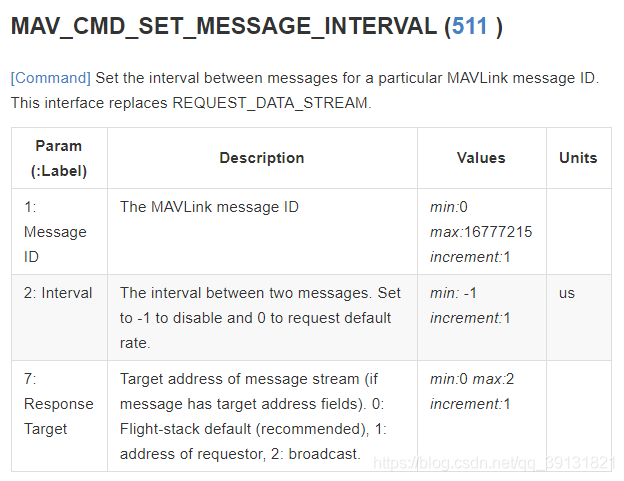
通过介绍可以看到数值代表修改消息间隔时间的命令,该数值后接特定的Message ID(通过官网查询得到)和间隔时间Interval,后面的Response Target默认接5个0就可以了。
/mavros/imu/data_raw和 /mavros/imu/data对应值的即为Message ID,分别为上文提到的105和31。
示例:修改mavros中distance_sensor话题的频率
在飞控使用过程中,使用了TFminiPlus单点激光测距雷达定高,其话题名为/mavros/distance_sensor/rangefinder_pub,在MAVLink官网中查询distance_sensor所对应的Message ID为132,频率最初为10Hz,不满足使用需求。
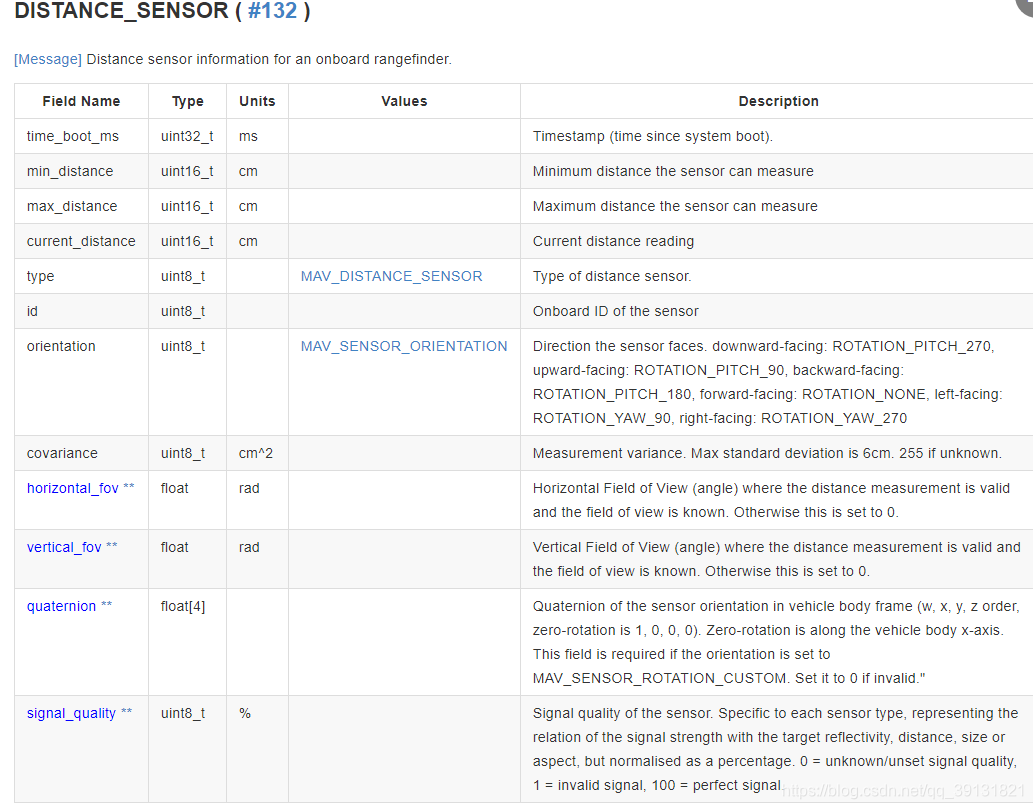
修改为50Hz,间隔时间20000us,命令如下:
rosrun mavros mavcmd long 511 132 20000 0 0 0 0 0
其他话题修改方法同上,主要是在MAVLink官网查询话题的关键词,找到对应的 Message ID。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)