VFH*避障/局部路径规划算法
- 1、VFH+存在的问题——dead-end
- 2、VFH*算法
- 2.1 VFH*算法概述
- 2.1.1 VFH*的参数
- 2.2.2 表示
- 2.2.3 算法步骤
- 2.2 投影位置和方向
- 2.3 代价函数
- 2.3.1
k
e
k_e
ke项
- 2.3.2 平滑项
- 2.3.3 折扣因子λ
- 2.4 启发函数
- 2.5 枝叶因子b
- 3、算法分析
做个正直的人
VFH*是VFH、VFH+两个算法的持续改进,对这两个算法不熟悉的同学,不建议直接看这一篇文章。可以去看我写的两篇介绍VFH、VFH+算法的文章。
先说一下这三个算法的关系。VFH(Vector Field Histogram)的前身是VFF(Virtual Force Field),VFH+是对VFH的改进,VFH*又是对VFH+的改进。也就是下面这样的关系
V
F
F
>
>
V
F
H
>
>
V
F
H
+
>
>
V
F
H
∗
VFF>>VFH>>VFH+>>VFH*
VFF>>VFH>>VFH+>>VFH∗
话不多说,直接上干货。
1、VFH+存在的问题——dead-end
VFH*之所以要改进VFH+,这是因为VFH+在某些情况下会出现很不希望出现的表现。请看下图,机器人检测到障碍物时,VFH+算法这个时候可以计算出两个可行的前进方向:A和B。VFH+这个时候是有很大的概率会选择A方向前进的。然而,很明显,如果机器人真的沿着A方向前进,那么很快机器人就会发现前方是一个dead-end(死胡同),机器人就不得不改变方向甚至原路返回后沿着B方向前进。
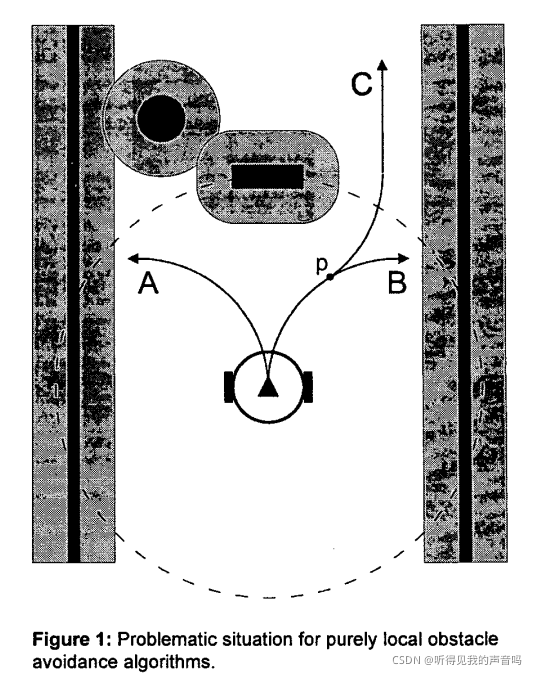
那我们就发现,这种情况下,机器人对待dead-end的表现是很差劲的。那我们就来分析一下,是什么导致机器人难以应对dead-end的呢?
不难发现,VFH+采用一个圆(实际上是传感器的数据,比如声呐)来检测障碍物,但是这一个圆的半径总归是有限的,这就导致机器人实际上能看到的视野也是十分有限的,那已知信息很少,自然控制效果也就比较差了。那么我们该采取什么手段来解决问题呢?
我们再来分析一下,VFH+之所以如此,是因为VFH+没有考虑如果真的沿着选择的方向前进后会遇到什么。如果他考虑了,那就有可能及早发现dead-end,从而尽早选择别的路。这就是VFH*算法。
2、VFH*算法
2.1 VFH*算法概述
VFH*所做的改进其实非常少,只有一步,那就是纳入了前瞻距离(Look-ahead),即通过提前探查一下如果真的沿着某一个方向前进会不会遇到dead-end,根据探查的结果,来选择更好的前进方向。
不过,虽然只是改进了一步,所做的工作却不少。下面我们来具体的描述一下这一个过程。
VFH*首先也是构建极坐标直方图,然后根据直方图中的openings来确定所有候选的前进方向。只不过VFH*在此时并不急于确定最终的前进方向,而是要沿着每一个方向进行探查。探查的过程类似于A*算法中的expansion操作。
假如说,机器人确定了N个候选的前进方向,那么以机器人的当前位置为根节点,沿着这N个前进方向进行探查。每一次探查的距离设置为
d
s
d_s
ds(这是探查阶段的第一个重要参数),探查出来的新节点标记为projected node,然后计算该节点处的代价和启发函数值。然后,在新节点处继续探查。一直重复
n
g
n_g
ng次(这是VFH*算法的第二个重要的参数)。
在探查阶段完成之后,在搜索树中搜索那一条代价最短的路径。这一条路径VFH*算法规划出的避障路径。
2.1.1 VFH*的参数
总的说来,VFH*算法有三个主要的参数,
d
s
d_s
ds、
n
g
n_g
ng、
d
t
d_t
dt,并且这三者之间满足如下关系:
d
t
=
n
g
∗
d
s
d_t=n_g*d_s
dt=ng∗ds
其中,
d
s
d_s
ds每一次探查的距离,建议设置为机器人的直径;
n
g
n_g
ng是设定的探查次数,一般设置为2;
d
t
d_t
dt总共探查的距离,最好接近机器人传感器的有效检测距离。
2.2.2 表示
VFH算法重点关注的是边的方向,因此我们的描述也把重点放在边上。
我们把机器人当前的位置记为primary node,把探查出来的节点记为projected node,它们有两个属性:position和orientation。
把在primary node处计算出的候选前进方向称为 primary candidate orientation。
把在projected node处计算出的候选前进方向称为 projected candidate orientation。
我们把每一个探查出来的边称为方向段。
2.2.3 算法步骤
VFH*算法在节点
i
i
i处的探查总共分为5步:
- 在节点
i
i
i处,也就是projected position
(
x
i
,
y
i
)
(x_i,y_i)
(xi,yi)构建极坐标直方图
- 在直方图中确定所有的候选前进方向
- 沿着所有的候选前进方向计算探查出来的新节点的位置和方向
- 计算这些新节点的代价
- 计算这些新节点的启发式距离。
前两步和VFH+完全一样,下面只介绍3-5步。
2.2 投影位置和方向
进行探查时探查出来的方向段,是用圆弧和直线来近似表示的。探查距离设置为
d
s
d_s
ds。
设置机器人向左转弯、向右转弯的最小转弯半径为
r
l
r_l
rl、
r
r
r_r
rr。其示意图如下图所示:
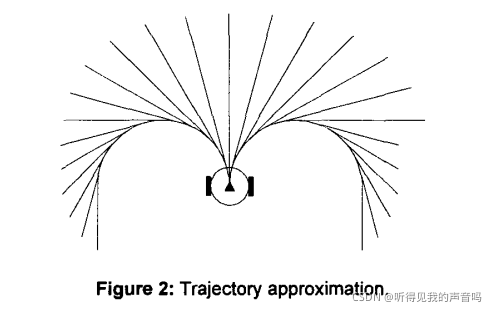
那么在沿着某一个候选前进方向探查时,首先判断机器人在投影距离内能不能到达到达这一方向。如果不能,那么投影轨迹就简单地用一个固定曲率的圆弧来代替。
区分向左探查和向右探查也是很有必要的,并且规定,允许向左、向右选择的方向范围应该在
θ
l
θ_l
θl和
θ
r
θ_r
θr之间,其中
θ
l
=
θ
i
−
d
s
/
r
l
θ_l=θ_i-d_s/r_l
θl=θi−ds/rl
θ
r
=
θ
i
−
d
s
/
r
r
θ_r=θ_i-d_s/r_r
θr=θi−ds/rr
说实话,作者的这一段描述,我是着实不理解。难道不就向着某一个方向新生长出来一个节点,然后在该节点处应用VFH+算法计算该点处的候选前进方向,然后计算代价函数并继续探查吗?怎么说的那么迷糊呢?
2.3 代价函数
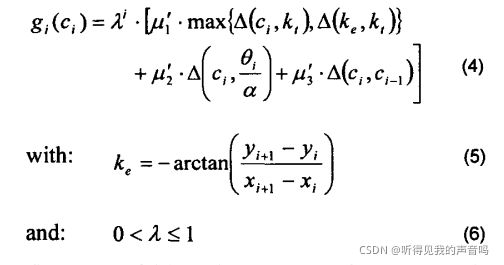
在VFH+中使用的代价函数如下所示:

其中,第一项代表该方向和目标方向的差值;第二项代表该方向和机器人当前方向的差值;第三项代表该方向和上一次选择的方向之间的差值。如果希望VFH+是目标导向的,则需要满足
μ
1
>
μ
2
+
μ
3
μ_1>μ_2+μ_3
μ1>μ2+μ3。
在VFH*算法中,我们为每一个投影出的候选方向(方向段)计算代价,采用如下函数
2.3.1
k
e
k_e
ke项
(4)的第一项依然是代表目标导向。但是这个函数和VFH+用到的函数略有不同,在某一个projected node处,我们计算它的代价时不仅考虑了目标方向,还引入了另一项,那就是
k
e
k_e
ke,称为forward progress,这一项代表从该节点的父节点到该节点处的方向角,那么为什么要引入这一项呢?请看下图。
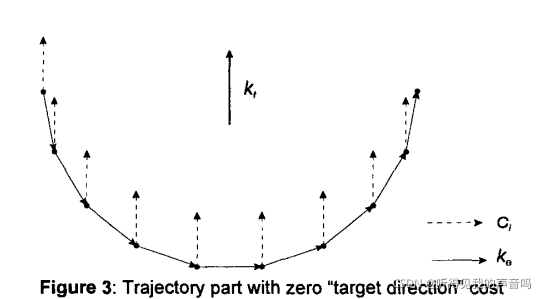
在每一个projected node处,候选前进方向都是和目标方向一致的,但是我们发现,节点的expansion却是在一个圆弧上,并不是靠近目标的,所以仅仅考虑该节点处的方向,不足以评价该节点的好坏,因此需要引入另一项,也就是
k
e
k_e
ke,该项代表该节点是靠近目标了还是远离目标了,因而可以更好的评价一个节点趋向目标点的程度。
值得强调的是,只有在计算连接projected node及其父节点的那一个方向段的代价时,才会考虑
k
e
k_e
ke,在计算机器人primary node处的方向段时不考虑
k
e
k_e
ke项。
2.3.2 平滑项
代价函数的第二项和第三项是用来决定机器人运动平滑程度的。为了保证机器人的目标导向性,需要满足
μ
1
’
>
μ
2
’
+
μ
3
’
μ_1’>μ_2’+μ_3^’
μ1’>μ2’+μ3’
同时为了强调primary 候选方向的重要性,需要满足
μ
1
>
μ
1
’
μ_1>μ_1^’
μ1>μ1’
2.3.3 折扣因子λ
代价函数中另一个很重要的因子是λ,该因子是基于这样的考虑,探查的越远,那么该处的节点对机器人的避障影响就越小,因此随着探查的深入,相应的代价也随之减小。
那如果我们不设置这一个折扣因子,会发生什么事?请看下图。
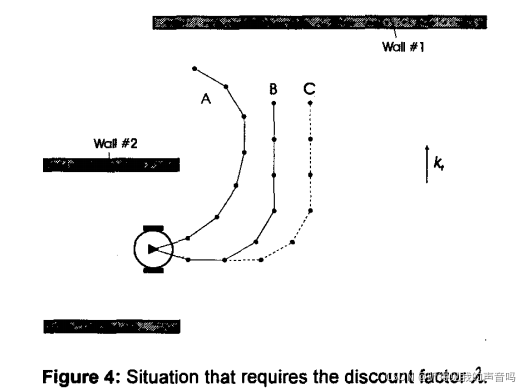
上图中,有A、B、C三条路径,如果不设置折扣因子(等同于把折扣因子设置为1),那么搜索阶段搜索到的代价最低的路径将会是B。为什么呀?直观看来明显应该是A比B更好呀。这是因为没有折扣因子的话,每一个方向段对代价的影响是相同的,很明显B在最后几次探查中,一直和目标方向一致,导致其代价比较小,因而B的代价就比A小了。而在引入折扣因子之后,就强化了离机器人较近的方向段,削弱了离机器人较远的方向段。这个时候,A就可以战胜B成为代价最小的路径了。
另外,上图中的探查次数
n
g
n_g
ng为7。我们可以发现,只要
n
g
n_g
ng再大一,B就会检测到障碍物,从而B的代价就会急剧增加。但是此时我们很可能依然无法判定A,因为此时,C依然是没有碰到障碍物,很可能C的代价还是比A小,我们依然没办法把A这一条我们期望的路径给挑出来。这说明仅仅通过调整探查深度
n
g
n_g
ng是没有办法达到目的的。必须通过这一个折扣因子λ才能够实现。
2.4 启发函数
启发式函数是用来评价这一个projected node 距离目标远近程度的,可以帮助算法更快地收敛。最简单的一个启发函数为

可以看得出来上面这个启发函数直接用
k
t
k_t
kt来代替
c
0
c_0
c0。这个函数只考虑了机器人当时的方向和前一节点处的方向,而没有考虑
k
e
k_e
ke。
我们可以选择一个更好的启发函数: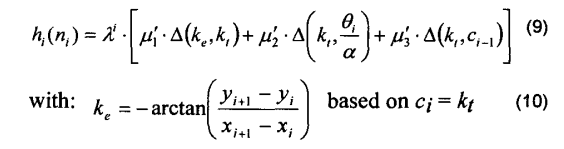
这一个函数考虑了
k
e
k_e
ke的影响,但是代价就是其计算量大了。
2.5 枝叶因子b
为了加快搜索阶段的执行效率,我们才可采取修剪搜索树的方法。
每一个projected node在扩展之后,都会有几个successor node,successor node的数量和这一个节点的候选前进方向的数量是一致的。我们一般将探查距离
d
s
d_s
ds设置为机器人的直径,这个值对于机器人所处的环境来说通常是很小的。因而这些新扩展出来的节点是很接近的,我们不妨把它们看成一个节点。
并且,我们在前面确定过机器人可以向左、向右制动的最大方向角。
θ
l
=
θ
i
−
d
s
/
r
l
θ_l=θ_i-d_s/r_l
θl=θi−ds/rl
θ
r
=
θ
i
−
d
s
/
r
r
θ_r=θ_i-d_s/r_r
θr=θi−ds/rr
那么所有那些,超过了这一个范围的新节点,都给整合成一个节点。并且在机器人的左侧方向和右侧方向我们均尽量只保留一枝,这样的话,一个节点的successor node个数很少会超过3。
最后我们在这一个树中搜寻代价最小的“枝”,这就是我们期望的那一条路径。
3、算法分析
我觉得这个算法思路是很好的。只是
n
g
n_g
ng这一个参数有些难整。
作者说,
n
g
n_g
ng设置的小一些,算法速度更快,但是处理dead-end的能力也较弱。
n
g
n_g
ng越大,处理dead-end的能力越强,但是计算量就大大增加。
并且作者说,
n
g
n_g
ng设置为2可以应对绝大多数情况。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)