实验室瑞泰载板的Xavier刷机过程,不可用nvidia官方刷机方法,以下部分基本和瑞泰教程类似:
下载文件
下载前,需要注意版本对应关系,这里安装L4T 32.4.3 和 JetPack 4.4。
文件在瑞泰官网或实验室NAS可找到:
Tegra186_Linux_R32.4.3_aarch64.tbz2
Tegra_Linux_Sample-Root-Filesystem_R32.4.3_aarch64.tbz2
Realtimes_L4T_3243_xavier.tar
解压文件、环境搭建
1、解压Linux Driver Package:
tar -vxf Tegra186_Linux_R32.4.3_aarch64.tbz2
生成文件夹目录 Linux_for_Tegra
2、解压the Root File System:
cd Linux_for_Tegra/rootfs
sudo tar -jxpf ../../Tegra_Linux_Sample-Root-Filesystem_R32.4.3_aarch64.tbz2
3、安装 BSP 支持包:
3.1 将 Realtimes-L4T.tar 包解压到与 Linux_for_Tegra 文件夹同级目录下面:
$ tar -xvf Realtimes_L4T_3243_xavier.tar
3.2 进入到 Realtimes-L4T 文件夹,运行
sudo ./install.sh
3.3 进入Linux_for_Tegra运行 apply_binaries.sh
sudo ./apply_binaries.sh
烧录系统
将xavier的USB type-C接口与电脑相连接。
按住recovery按键,上电:
进入recovery模式,可以在主机查看是否链接成功:
lsusb
显示:Bus 001 Device 014: ID 0955:7019 NVidia Corp.
进入Linux_for_Tegra目录下执行:
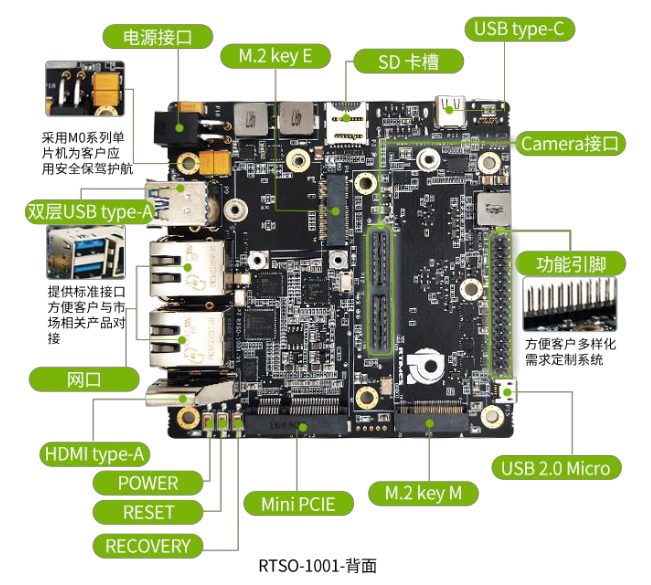
sudo ./flash.sh rtso-1001 mmcblk0p1
烧录完成后,下电重启,配置xavier系统即可。
然后更新源:设置 -> software update -> 全部勾选 -> 重新载入。
CUDA等环境安装
用网线链接使得xavier和主机位于同一局域网下,进行后续操作:
安装NVIDIA SDK Manager,登陆后:
1、选择对应版本的JetPack,Host Machine不要安装。
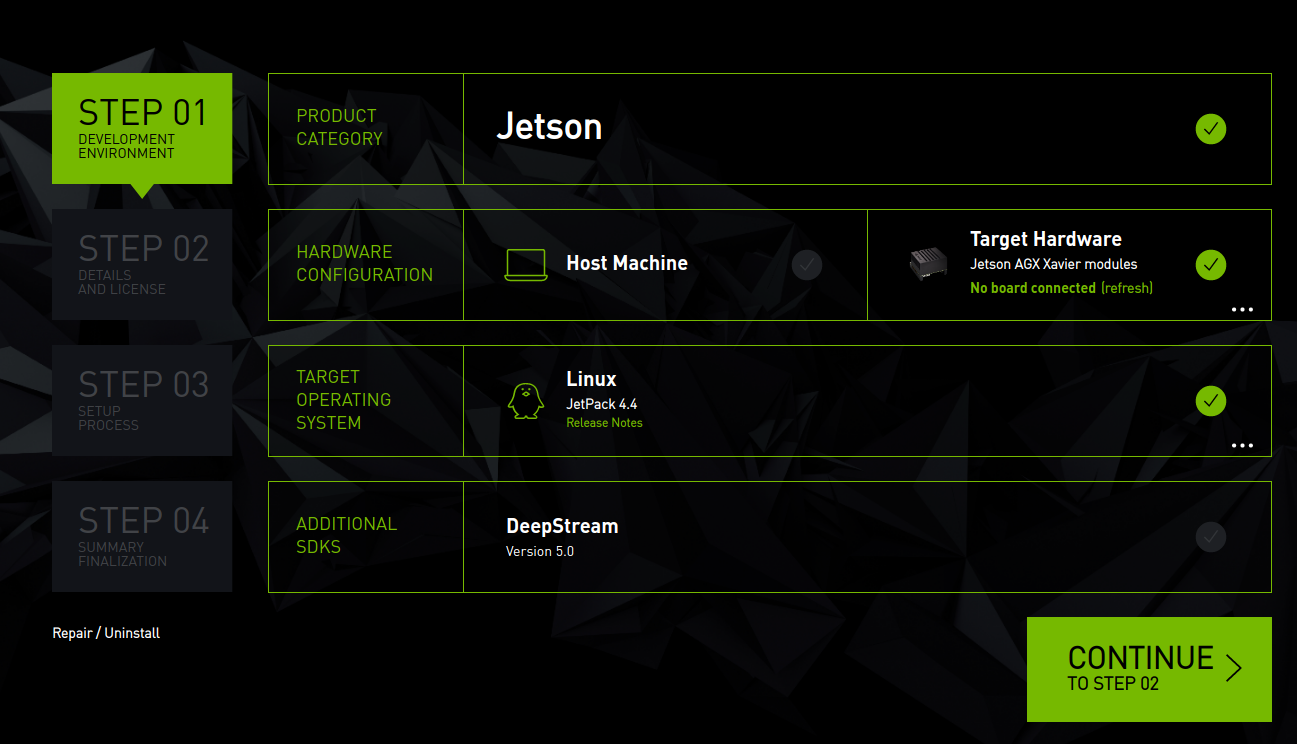
2、镜像刷的是瑞泰的镜像,这里不要选择Jetson OS
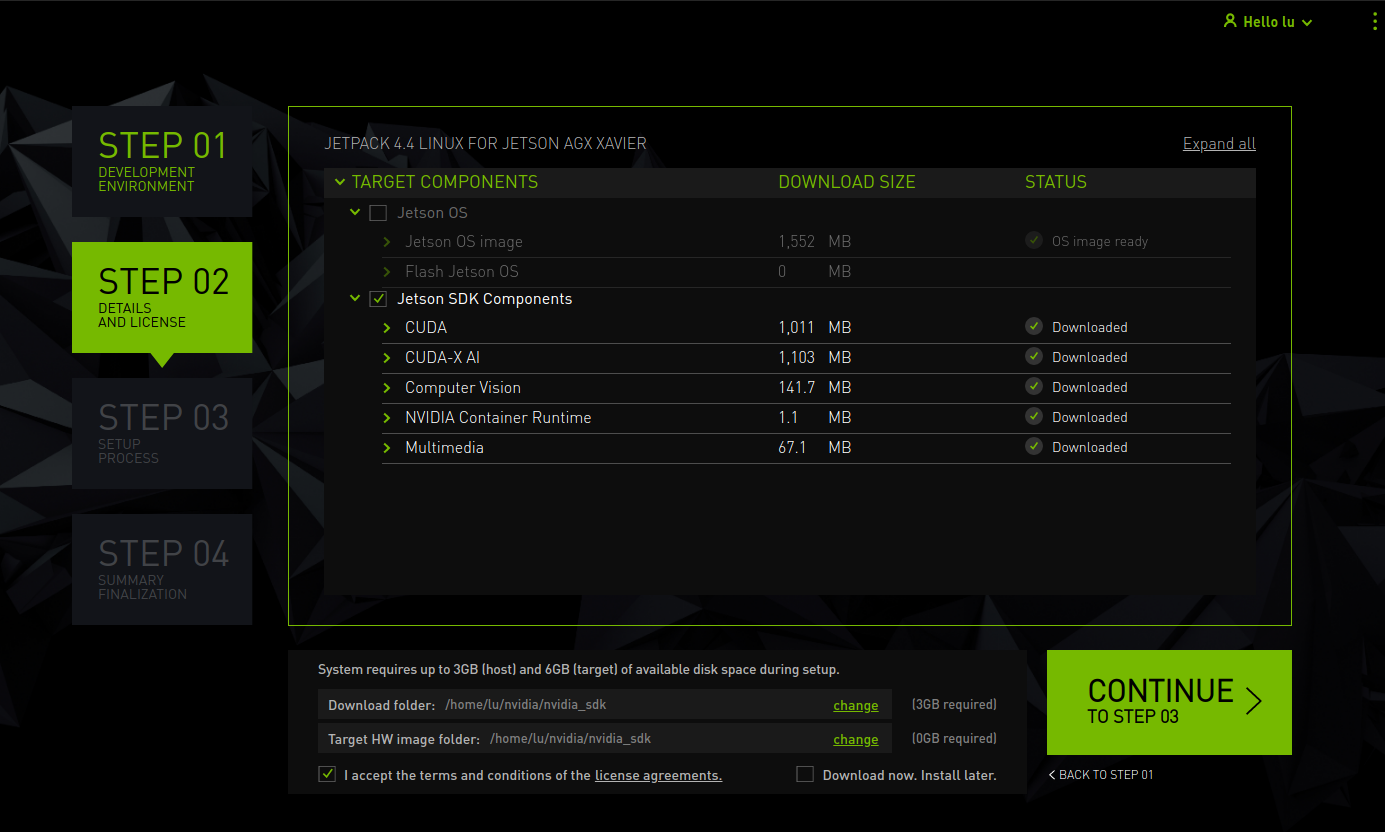
这一步报错提示空间不够,不用管,continue。
3、从xacier上可以ifconfig查看ip,在这里输入xavier的ip和用户名、密码
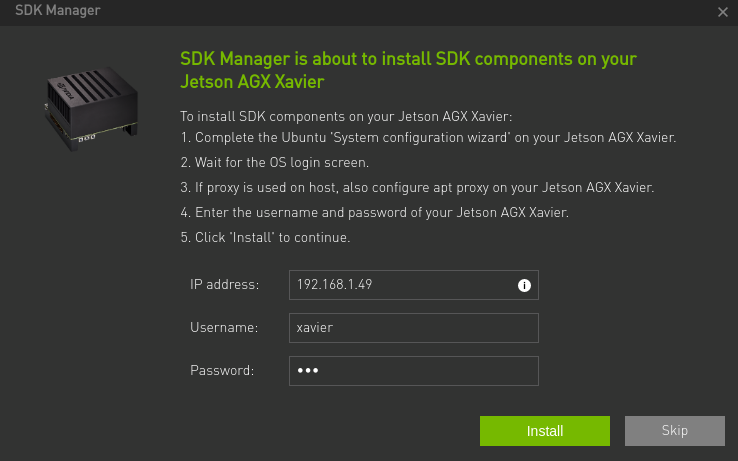
就可以安装了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)