学习目标:
学习detectron2数据集的注册以及基本的训练推理
一.工程文件下载与数据集准备:
整体的工程文件下载地址:
https://github.com/fenglingbai/FruitsNutSeg
在项目中如图所示(output/model_final_f10217.pkl需要在官网下载):
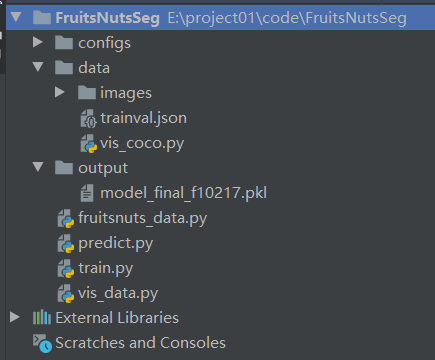
水果坚果的实例分割网络这里采用mask_rcnn_R_50_FPN_3x作为例子,网络结构参数在工程文件中已经设置好,如果后续需要更改可以自己进行。
网络预训练权重在官网的
https://github.com/facebookresearch/detectron2/blob/main/MODEL_ZOO.md
进行相应权重的下载(标红点处)
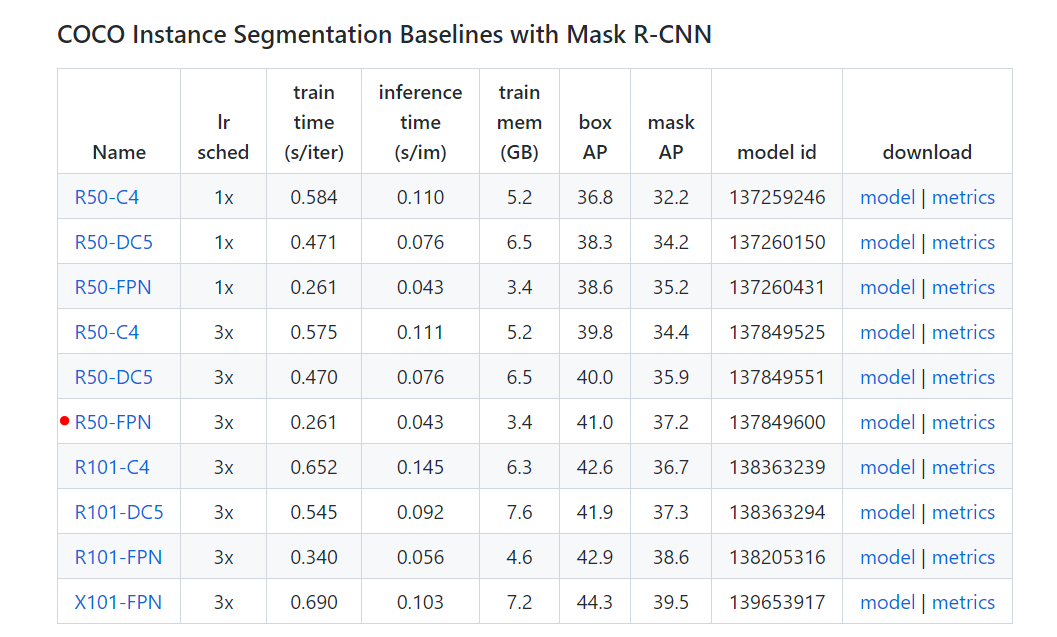
放在output文件夹中。
二.注册数据集:
在fruitsnuts_data.py文件中,进行水果坚果数据集的注册。代码如下所示
from detectron2.data.datasets import register_coco_instances
from detectron2.data import DatasetCatalog, MetadataCatalog
register_coco_instances("fruits_nuts", {'thing_classes':['date', 'fig', 'hazelnut'],
'thing_dataset_id_to_contiguous_id':{1: 0, 2: 1, 3: 2}}, "./data/trainval.json", "./data/images")
其中函数register_coco_instances是detectron2的一个接口,用来专门注册coco形式的数据集,其基本形式如下:
register_coco_instances(name, metadata, json_file, image_root)
其中name是自己的数据集名称,json_file是标注文件的地址,image_root是图片数据的地址,metadata是数据集的基本信息,如果缺省则用空字典输入,否则可以用键值对的形式录入。
注册完毕后,可调用接口进行检查,注释为对应的数据集数据:
fruits_nuts_metadata = MetadataCatalog.get("fruits_nuts")
在其他文件进行注册时,可以直接使用
import fruitsnuts_data
进行注册
训练:
训练代码详见train.py:
import random
from detectron2.utils.visualizer import Visualizer
from detectron2.data.catalog import MetadataCatalog, DatasetCatalog
import fruitsnuts_data
import cv2
from detectron2.engine import DefaultTrainer
from detectron2.config import get_cfg
from detectron2.utils.logger import setup_logger
import os
setup_logger()
if __name__ == "__main__":
cfg = get_cfg()
cfg.merge_from_file(
"./configs/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x.yaml"
)
cfg.DATASETS.TRAIN = ("fruits_nuts",)
cfg.DATASETS.TEST = ()
cfg.DATALOADER.NUM_WORKERS = 2
cfg.MODEL.WEIGHTS = "./output/model_final_f10217.pkl"
cfg.SOLVER.IMS_PER_BATCH = 2
cfg.SOLVER.BASE_LR = 0.0025
cfg.SOLVER.MAX_ITER = (300)
cfg.MODEL.ROI_HEADS.BATCH_SIZE_PER_IMAGE = (128)
cfg.MODEL.ROI_HEADS.NUM_CLASSES = 3
os.makedirs(cfg.OUTPUT_DIR, exist_ok=True)
trainer = DefaultTrainer(cfg)
trainer.resume_or_load(resume=False)
trainer.train()
print('OK')
注意需要修改的地方主要有以下几点:
1.cfg.merge_from_file:网络参数设置的路径
2.cfg.MODEL.WEIGHTS:网络初始化权重的路径
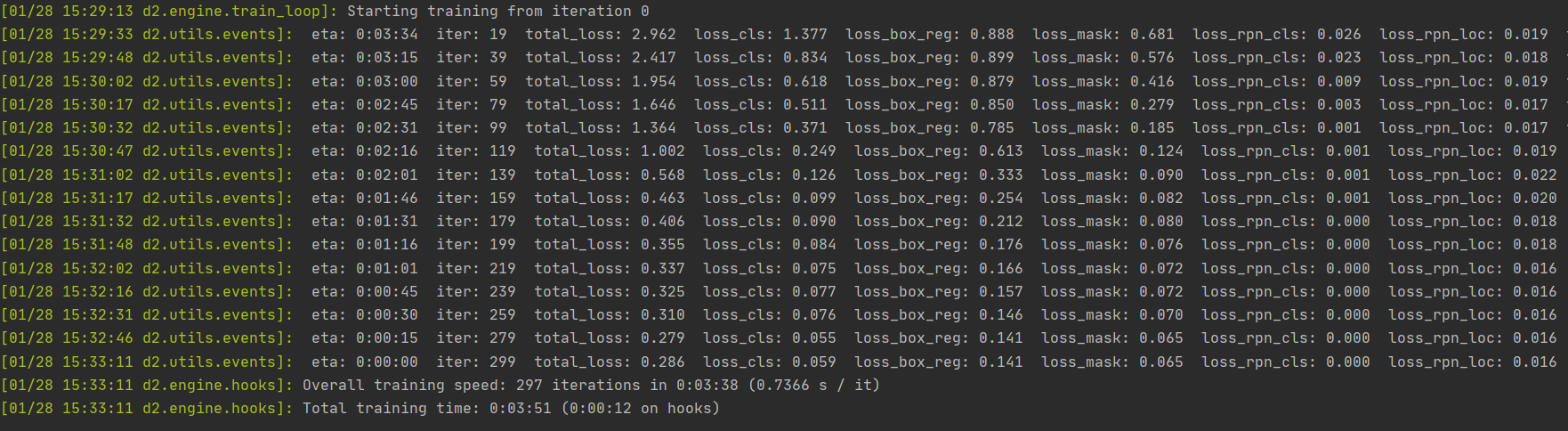
运行后直接可以进行网络训练

训练后的结果为:
推理:
预测推理代码详见predict.py:
import random
from detectron2.utils.visualizer import Visualizer
from detectron2.data.catalog import MetadataCatalog, DatasetCatalog
import fruitsnuts_data
import cv2
from detectron2.engine import DefaultTrainer
from detectron2.config import get_cfg
import os
from detectron2.engine.defaults import DefaultPredictor
from detectron2.utils.visualizer import ColorMode
fruits_nuts_metadata = MetadataCatalog.get("fruits_nuts")
if __name__ == "__main__":
cfg = get_cfg()
cfg.merge_from_file(
"./configs/COCO-InstanceSegmentation/mask_rcnn_R_50_FPN_3x.yaml"
)
cfg.MODEL.WEIGHTS = os.path.join(cfg.OUTPUT_DIR, "model_final.pth")
print('loading from: {}'.format(cfg.MODEL.WEIGHTS))
cfg.MODEL.ROI_HEADS.SCORE_THRESH_TEST = 0.5
cfg.MODEL.ROI_HEADS.NUM_CLASSES = 3
cfg.DATASETS.TEST = ("fruits_nuts", )
predictor = DefaultPredictor(cfg)
data_f = './data/images/3.jpg'
im = cv2.imread(data_f)
outputs = predictor(im)
v = Visualizer(im[:, :, ::-1],
metadata=fruits_nuts_metadata,
scale=0.8,
instance_mode=ColorMode.IMAGE_BW
)
v = v.draw_instance_predictions(outputs["instances"].to("cpu"))
img = v.get_image()[:, :, ::-1]
cv2.imshow('rr', img)
cv2.waitKey(0)
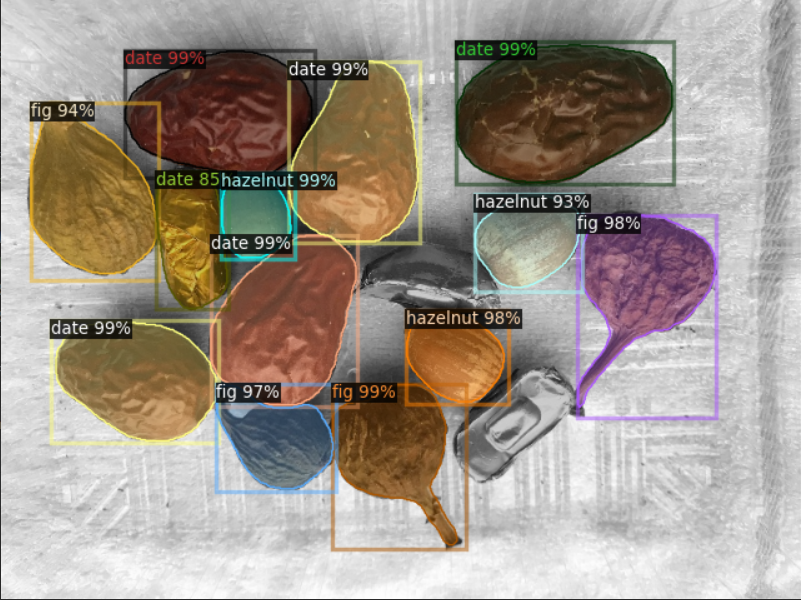
其中data_f是需要预测推理的图片地址,运行程序后结果如下:
三.其他可能的问题:
1.预测的图片没有类别标注
这是由于在数据注册阶段没有进行对应的数据输入,
2.出现警告UserWarning: This overload of nonzero is deprecated: nonzero
解决方法:在对应位置nonzero()中改为:
nonzero(as_tuple=False)
3.出现警告Skip loading parameter
这是由于初始的网络权重是适应81类分类任务的,而当前的分类任务为4,因此会有一些网络参数进行省略,这里忽略即可。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)