测试流程:
在 EuRoC V1_01_easy 数据集上测试 VINS-Fusion 在线外参估计效果。使用估计前后不同的外参得到两条完整轨迹,使用 rpg_trajectory_evaluation 工具对比了两条轨迹相对 ground truth 的误差。
rpg_trajectory_evaluation 使用:
#依赖项
python -m pip install numpy matplotlib colorama
#安装
mkdir -p rpg_ws/src
cd rpg_ws/src
git clone https://github.com/uzh-rpg/rpg_trajectory_evaluation.git
git clone https://github.com/catkin/catkin_simple.git
cd ..
catkin_make
#使用
source devel/setup.bash
rosrun rpg_trajectory_evaluation asl_groundtruth_to_pose.py 轨迹保存路径/vio.csv
mv 轨迹保存路径/groundtruth.txt 轨迹保存路径/stamped_traj_estimate.txt
rosrun rpg_trajectory_evaluation analyze_trajectory_single.py 轨迹保存路径
另外,rpg_trajectory_evaluation 默认基于 sim3 对齐,对应纯单目视觉的情况,创建文件可以指定 align_type 和 align_num_frames。
align_type:
· sim3:相似变换(用于视觉单目情况)
· se3:刚体变换(用于视觉双目情况)
· posyaw:平移加上围绕重力的旋转(用于视觉惯性情况)
· none:不对齐轨迹
align_num_frames:
将在轨迹对齐中使用的位姿数(从头开始)。-1 表示将使用所有位姿。
外参收敛过程:
下图中 t 表示单位为 m 的平移外参,r 表示单位为 ° 的旋转向量形式的旋转外参。如下所示,外参的旋转部分和平移部分都基本收敛。

外参的保存方法时在estimator.cpp文件里的optimization函数里,找到“ROS_DEBUG("Iterations : %d", static_cast<int>(summary.iterations.size()));”这行代码,并在这行代码下面添加如下代码:
std::ofstream outfile;
outfile.open(OUTPU_FOLDER+"extrinsic.txt", ios::app);
Eigen::Quaterniond temp_q(para_Ex_pose[0][6], para_Ex_pose[0][3], para_Ex_pose[0][4], para_Ex_pose[0][5]);
Eigen::AngleAxisd temp_rotation_vector(temp_q);
Eigen::Vector3d temp_rotation_v = 57.3 * temp_rotation_vector.angle() * temp_rotation_vector.axis();
outfile << std::to_string(curTime) << " " << para_Ex_pose[0][0] << " " << para_Ex_pose[0][1] << " " << para_Ex_pose[0][2] << " " << temp_rotation_v[0] << " " << temp_rotation_v[1] << " " << temp_rotation_v[2] << std::endl;
outfile.close();
这样,左目相机与IMU之间的外参就保存在extrinsic.txt文件中,每行数据的顺序是Timestamp、tx、ty、tz、rx、ry、rz。最后使用python编写脚本,利用matplotlib即可画图。
外参估计前后的轨迹误差:
Rotation Error:

使用官方外参

使用估计得到的外参
Translation Error:
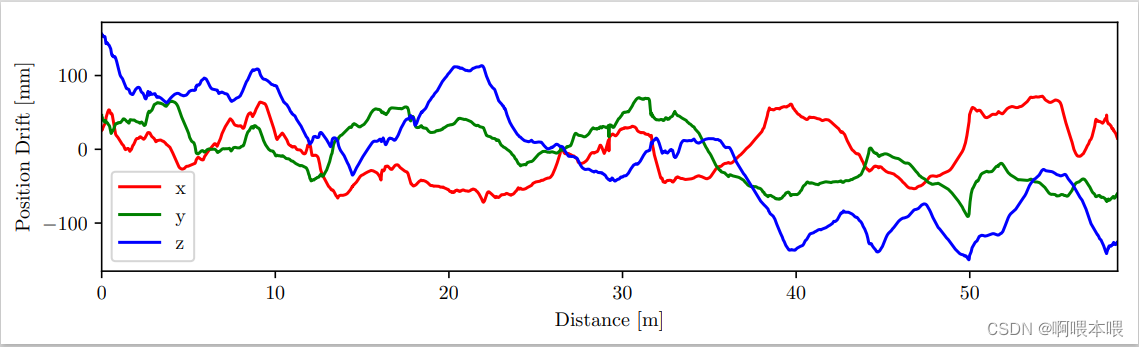
使用官方外参

使用估计得到的外参
Scale Error:

使用官方外参

使用估计得到的外参
侧面视角下的轨迹:

使用官方外参
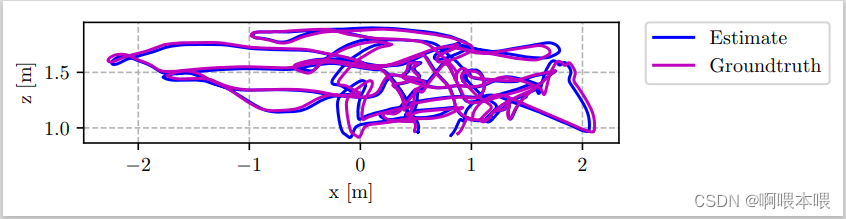
使用估计得到的外参
总结:
现象:
VIN-Fusion 在线估计得到的外参与官方外参有较大的差别,且使用估计得到的外参可以使轨迹整体精度明显提高。
原因:
官方外参是在相机内参为 pinhole 模型下标定出来的,与 VIN-Fusion 自己标定出来的 mei 模型的相机内参不匹配,因此重新估计外参可以使精度有明显提升。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)