通常电子工程师会把PCB和原理图做出一个PDF的资料用来生产或者认证,这个可以通过AD自带的功能实现,但是这个方法做出的PDF比较单一,一般一页PDF只可以输出一个面之类,也不可以加上表头之类,下面我通过一次客户要求做的资料来说一下怎么用CAD软件输出PCB的PDF资料。(这个方法我想了一下还可以,试了几次还可以,但是有一些地方要完善)
这一次做的资料是这样子。首先客户给了一个PDF的资料,内容是PCB的正反两面走线图和丝印图(一个图只显示一面),4个图在同一页,还有公司的表头之类。要求把内容换成新的PCB。这个的难点就在于怎么把四个图做到在同一个PDF,并且还要工整。还要有表头。为了避嫌我把内容加上马赛克。

首先下载一个软件,把PDF的文档转为DWG的格式,用CAD打开,再把原先的图给删除掉,(这里就讲思路,不讲怎么操作,不会CAD的朋友百度,我也是百度慢慢学会一些操作的)就可以得到表头了。

接下来就是把PCB输出一个DWG的文档,同样用CAD打开。

接下来就是把图复制4个出来。这里注意底层的两个图要镜像一下

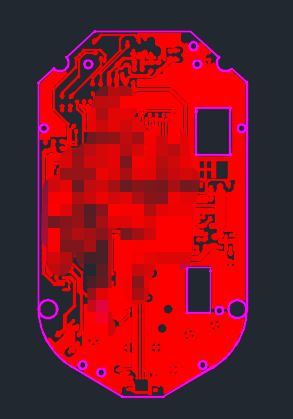
好了,接下来就是怎么做出正负两面的走线图和丝印。以顶层走线图为例子,我把图层的顶层走线和板边的层锁定,这样子就操作不良这两个层的图,剩下的就是直接把其他的删除掉。这样子就得到一个顶层的走线图。

其他的三个图同样的道理。这样子就得到了客户要求的4个图啦。

剩下的就是把这四个图复制刚才的表头那里。我遇到的问题就是复制过去大小不一样之类,但是通过放大旋转就可以了,这些是CAD的操作我就不说了。最终的图象就是这样子。(用其他的案例图演示一下)

最后一步就是打印成PDF,这个还是CAD的操作,就不说了。效果如下。

经过这次的资料输出,我有一个新的想法。就是能不能通过PDF的边框图生成CAD,再导入PCB作为边框尼,这样子没有CAD的图也可以做板(截至发表的时间点,我已经在新项目实现了,这个方法完全可行)。再往高深一点的方面想,在抄PCB板时,用千分尺测量的位置还是有点不准确,那能不能把PCB在复印机上打印出来为PDF,再导入PCB,这样子就完全一模一样了。(这个找时间试验一下,最近项目比较多没时间实验)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)