前提:在删除文件的时候可能存在文件被占用无法被删除
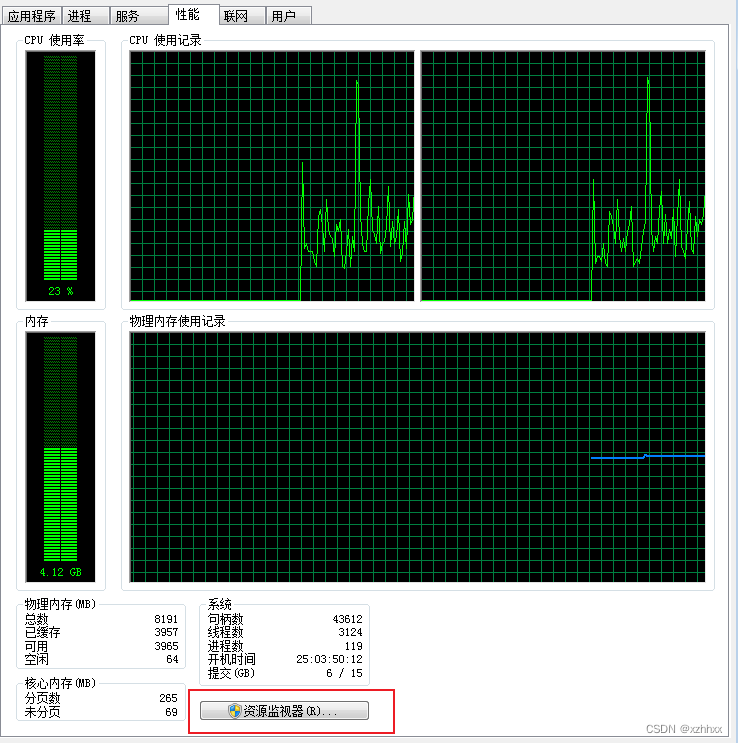
1.打开任务管理器,点击性能
2.点击性能下方的资源监视器
3.点击CPU,可以看到关联句柄输入框,输入被占用的文件夹或文件名称,点击搜索标志,即可查看到被占用进程
4.在任务管理器进程才当中中可查询到对应进程,结束进程即可删除文件

 3.点击CPU,可以看到关联句柄输入框,输入被占用的文件夹或文件名称,点击搜索标志,即可查看到被占用进程
3.点击CPU,可以看到关联句柄输入框,输入被占用的文件夹或文件名称,点击搜索标志,即可查看到被占用进程