互联网协议 TCP/IP协议
协议作用简单来说 就是规范不同的语言;
包含的协议有 TCP/IP实际上是一个协议组
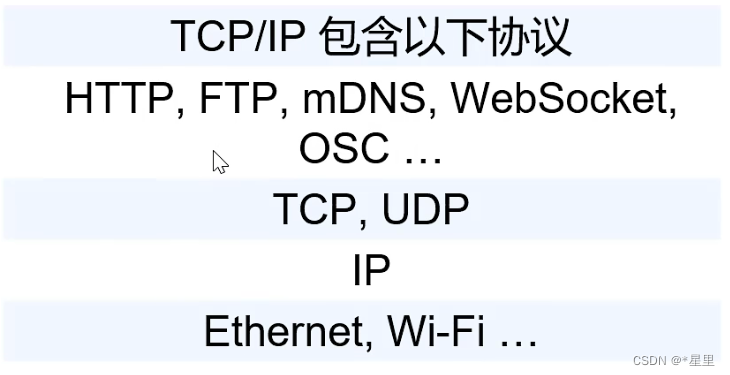
- 不同的协议处于不同的层次上 (由下到上) 链路层WIFI 网络层IP 传输层TCP/UDP 应用层 HTTP
- 链路层: WIFI Ethernet 就是实实在在的进行数据传输的物理连接层
-
ESP32的三种模式: 链路层 数据帧
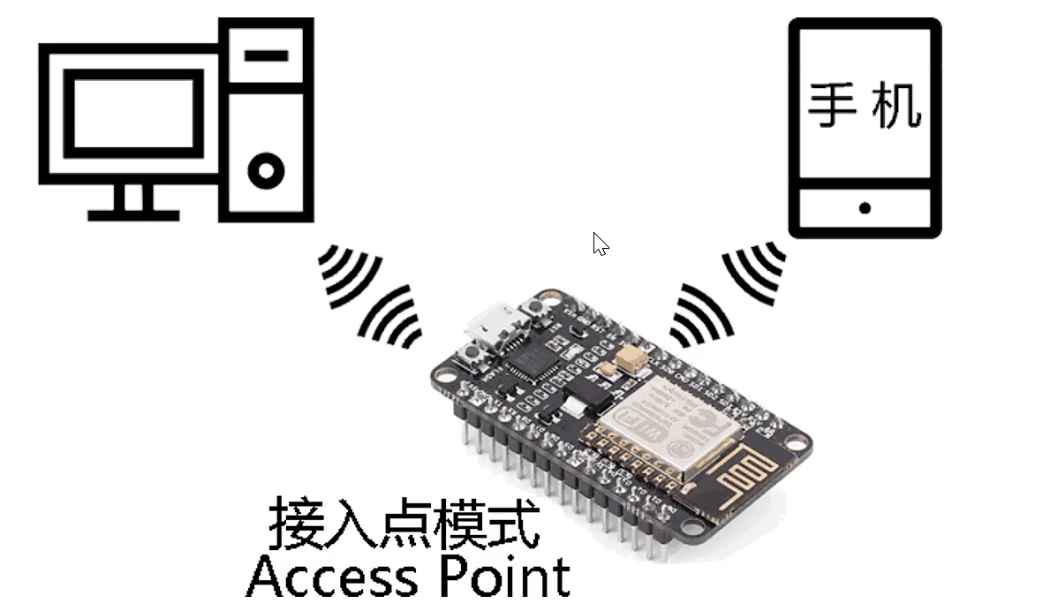
- 1,接入点模式:access point 简单来说就是此时esp8266就相当于一个WiFi热点 建立起一个局域网供 外联设备使用
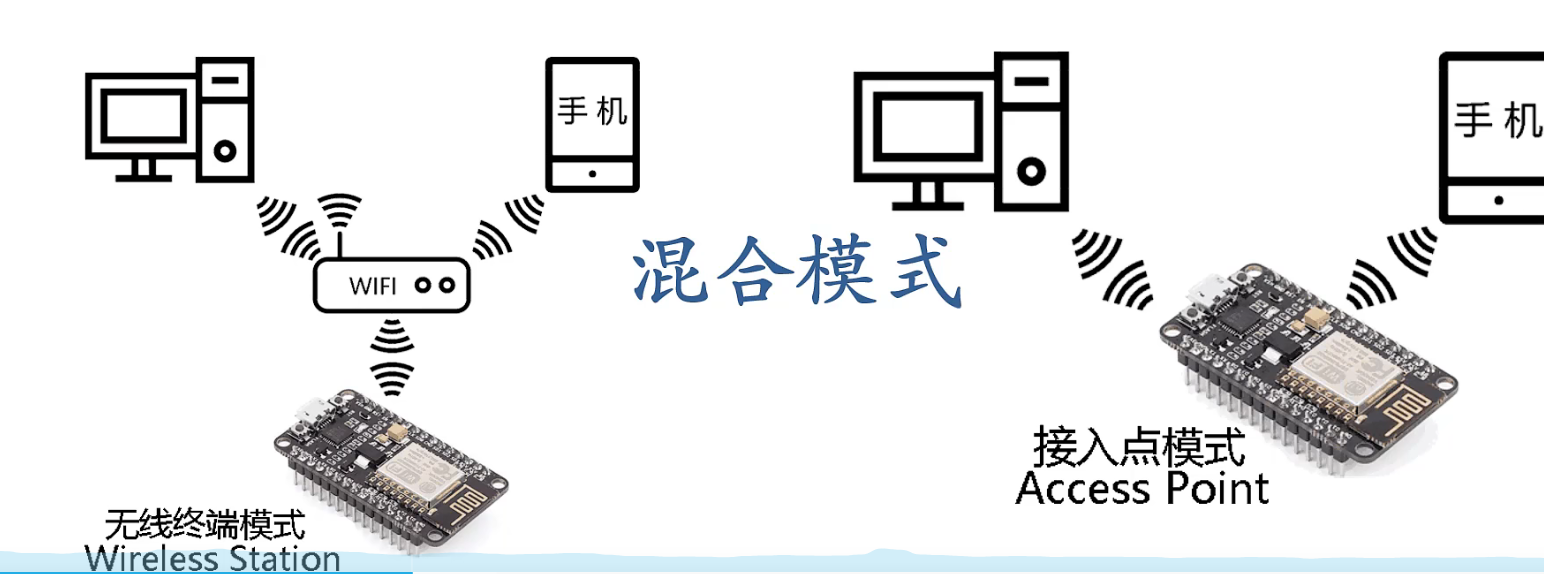
- 2,无线终端模式: wireless station 就是在局域网内 此时手机 电脑 esp8266都是节点

- 3,混合模式:就是在建立起自身WiFi热点网络时同时又可以接入本地局域网
- 网络层
- IP地址 就是为数据传输(包)提供相应的地址 发件人 与收件人的地址 相当于快递单号 是一个32位的二进制数
- IP地址的分类:首先知道IP地址由网络号码和本地计算机号码组成
- 小类: IP地址编制方案将IP地址分为 A B C D E 五类,A B C 为基本类 ;D E为多播和保留使用
- 首先 A类IP的 第一位为网络号码,剩下3位就为本地计算机号码;B类为前两位为网络号码,剩下两位为 本地计算机号码;依次C类 网络号为3位。。。。;
- 由上可知 A类地址网络有 126个由8位的网络标识长度决定 但是每个网络可以分到1600多万台主机为256的3次方减2,A类范围在1.0.0.0~127.255.255.255;同时A类IP的子网掩码为255.0.0.0 由此可知B C D类的特性 B类的网络号码为前两段网络标识 每个网络可以容纳(256的2次方-2)台主机 用于中等规模 C D IP 依次
- 除去公有类ip 剩下了三类私有IP 用于解决IP地址不足的问题,A类10.0.0.0~10.255.255.255 B类172.16.0.0~172.31.255.255 C类 192.168.0.0~192.168.255.255
- IPV4 与IPV6 : IPV6的推出是为了补充IPV4的有限性,32位地址的IPv4即将有被使用殆尽的可能,同时IPv4是点分十进制,ipv6是16进制 帽分16进制
- IPV6优点:1扩大了地址空间 让端对端传输成为可能,
- 2提高了网络整体的吞吐量 利用最大传输单元MTU可以获得更快,更高效的传输,让数据包可以远远超过64k字节
- 3,使得整个服务质量得到改善 报头中的业务级别和流标记通过路由器配置可以实现优先级控制和QOS保障
- 4,安全性得到了极大的提高,采用的IPSec可以为上层协议和应用提供有效的端到端的安全保证 能提高在路由器水平上的安全性
- 5,支持即插即用和移动性, 简单来说就是设备接入网络时通过自动配置可以自动获取IP地址和必要参数
- 6,更好的实现了多播功能,在IPV6的多播功能中增加了“范围”与“标识”;用于区分永久性的地址 和 临时性的地址
- 举个例子: 你家的路由器有三台设备接入局域网,此时局域网内三台设备就会被路由器分配一个独一 唯一的地址;当手机要为nodemcu发送数据时就会指明 发件人为 手机(IP:192.168.0.3)收件人为(IP:192.168.0.2) 这样才能完成传输。

- win+r 调出命令面板 然后输入 ipconfig 就可以查看电脑此时的局域网ip地址

- 默认网关: 解释网关就是出口路由器的地址 网关就是连接网络与网络之间的接口 借上图网关地址就是路由器的地址
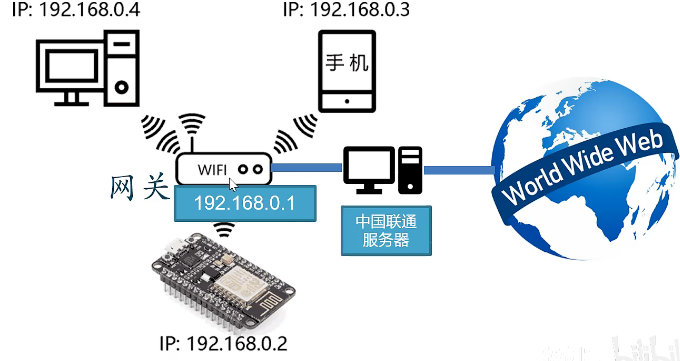
- 注意一点 在局域网内的地址在互联网中会发生改变,是因为中国联通服务器又相当于一个网关 这个网关接通了联通网络与全球互联网 就是说对于不同的网络 设备的IP地址是不同的
- 网关:其实就是一个网络通向其他网络的IP地址, 举个例子:现在网络A和网络B,在没有路由的情况下是不能进行TCP/IP通信的,即使两个网络连接在同一台交换机上也会根据TCP、IP协议根据子网掩码判定为不在同一个网络内;因此要进行这两个网络的通讯就必须通过网关。简单来说有了网关之后当A网络的主机发现数据包的目的地址不在自己的本地网络内就会把数据包转发给他自己的网关,再由网关转发给B网络的网关,网络B的网关再转发给网络B的某个主机,这样就完成了网络A向网络B转发数据包的过程。
- 子网掩码(NetMask):局域网中的设备的IP开头 如192.168.0.1 中前三段192.168.0就是子网地址 而结尾的.1就是本机地址 ;同一网络内的计算机依旧处于同一广播域内,划分通过VLAN 然后为每一个VLAN指定不同的IP网段来达到减少广播域的目的
- DNS服务器:计算机域名系统,由解析器和域名服务器组成。域名服务器是指保存有该网络中的所有主机的域名和对应的IP地址,并具有将域名转换为IP地址功能的服务器。其中域名必须对应一个IP地址,而IP地址不一定要有域名。域名系统采用类似目录树的等级结构,域名服务器为客户机、服务器模式中的服务器方,它有两种形式:主服务器与转发服务器。域名解析 就是将域名映射为IP地址的过程。
- 在命令行中输入 ping www.baibu.com 可以得到网站的IP地址 也可以用来检查网络连接 通过 nslookup 可以对域名进行解析

- 传输层TCP/UDP
- TCP协议 稳 (三次握手) : 保证所有数据都能被接收端接收,数据的传输顺序不会被打乱, 数据传输有损坏则重新发送受损数据;常用于电子邮件,文件传输
- UDP协议 快 : 简单来说就是发送端只管发送 不管你接收端是否成功接收,一旦数据受损,UDP协议将抛弃受损数据,不会重传; 常用于 在线语音,视频,网游
- 运用层 HTTP协议
- HTTP协议:模式简化理解就是一问一答的形式,请求头 请求体 request 响应头和响应体 response (三次挥手 四次握手)
- 当我们要访问百度网站时 首先打开电脑在浏览器中输入www.baidu.com按下回车enter之后电脑就会生成一个请求数据包,通过互联网之后到百度网站服务器,之后百度服务器就会返回一个相应数据包改数据包里就包含了百度网站首页的信息。

- 我们尝试来分析一个请求 一个请求数据包通常包含 请求行 请求头 请求体

- 请求行: 一般通过get (读取)来请求 在HTTP1.0协议中 规定了三种请求方法 【get,post,head解释:与get请求相似,但是响应报文中没有响应体,只有响应头】 ;在HTTP1.1协议中 还有 post(发送),put ,update,delete请求 。如图就是一个读取网站首页的一个请求,而后的协议就是为了告诉服务器我们协议的版本是1.1的
- 请求头:就是告诉互联网所请求的服务器主机为太极创客的服务器主机
- 当我们不再是读取信息 是发送信息的时候就是用post请求 用该请求来向目的主机发送数据
- 请求头剩下的部分 分析:第二行是所发送请求的电脑系统环境,第三行为网页的编程语言,第四行为浏览器支持的语言为中文,第五行为所支持的文件下载类型,第六行为响应之后是否保持连接
- 响应包:状态行 响应头 响应体
- 状态行:HTTP1.1 即响应的http的协议版本号为1.1版本;200 OK 或者404 not found 是服务器接收到请求之后的状态码 就是返回有没有找到相应的资源。 其他的响应状态码
- 响应头:第一行就是响应请求的时间,第二行 响应体的内容类型,为网页HTML代码;字符集为utf-8类型 可以想象ascll码表用数字可以表示符号,字母一样;
- 响应体:就是所请求的网页信息,如图就是太极创客网站的首页HTML代码 即正文
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)