Win10的Linux子系统Ubuntu安装图形界面
陈拓 2021/07/25-2021/07/26
1. 概述
Win10的linux子系统Windows Subsystem for Linux(简称 WSL)之Ubuntu安装见文章:
《Win10启用Linux子系统安装Ubuntu》
https://zhuanlan.zhihu.com/p/341394468
https://blog.csdn.net/chentuo2000/article/details/112131624
WSL安装完成后通过终端操作Linux子系统。
如果要运行带图形界面的程序,就需要为WSL安装图形用户界面GUI。
Linux图形界面多使用XServer。VcXsrv是常用于Windows的XServer。
VcXsrv可以运行安装在WSL环境中的Linux GUI程序。
有了XServer就可以运行Linux图形界面程序了,为例方便操作WSL我们可以安装一个Linux桌面环境,这不是必须的。我们安装常用的Linux桌面环境Xfce,Xfce是一个自由软件,运行在类Unix操作系统(如Linux、FreeBSD和Solaris)上,提供轻量级桌面环境。
2. Win10系统安装VcXsrv
VcXsrv的下载网址是:https://sourceforge.net/projects/vcxsrv/

点击Download下载vcxsrv-64.1.20.9.0.installer.exe
下载后安装,过程很简单。VcXsrv安装完成后的程序名字是Xlaunch,在开始菜单和桌面上都可以找到Xlaunch:


3. 配置XLaunch
echo -e "\n##DISPLAY Configuration" >> ~/.bashrc

echo "export DISPLAY=127.0.0.1:0.0" >> ~/.bashrc

export关键字导出DISPLAY环境变量
127.0.0.1是XServer的IP,也可以用win10电脑的IP
0.0的前一个0是XServer的显卡编号(一台机器可能有多个显卡)
0.0的后一个0是连到XServer指定显卡的显示器编号(一个显卡可能输出到多台显示器)

source ~/.bashrc

4. 使用VcXsrv
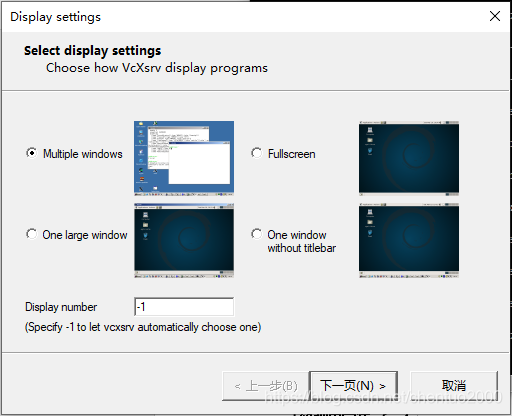
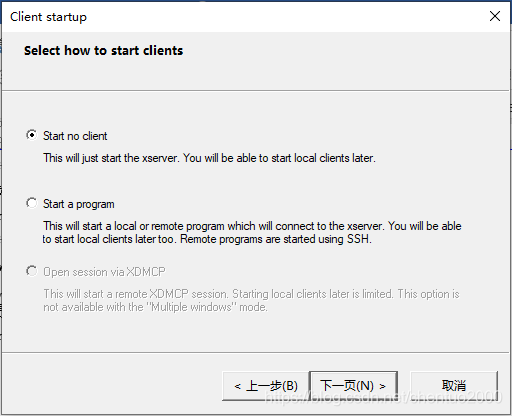
在Win10系统中打开XLaunch,启动XServer监听WSL。
一路默认就可以。
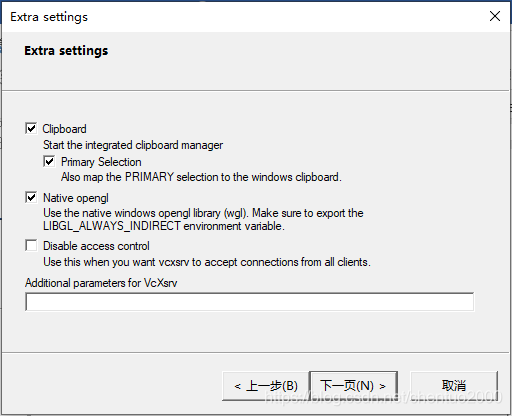
设置完成后XServer就启动了,开始监听WSL,桌面右下角会出现XLaunch图标:

或者

在WSL终端测试一下,运行xeyes:
OK!
现在我们已经可以在命令行中运行Linux图形界面程序了,如果有Linux桌面就更方便了。
5. 为WSL终端中安装桌面Xfce4
我们可以为WSL安装一个完整的Linux桌面Xfce4,方便对WSL的操作。
见《Win10的Linux子系统Ubuntu换源》
https://zhuanlan.zhihu.com/p/342771976
https://blog.csdn.net/chentuo2000/article/details/112387914
sudo apt-get update

sudo apt-get upgrade
sudo apt-get install xfce4 xfce4-terminal
出错,按照提示,输入命令:
sudo apt-get install xfce4 xfce4-terminal --fix-missing
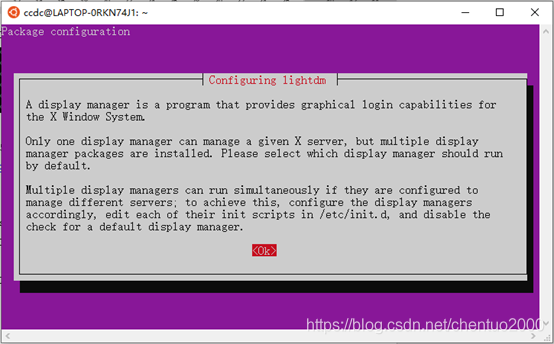
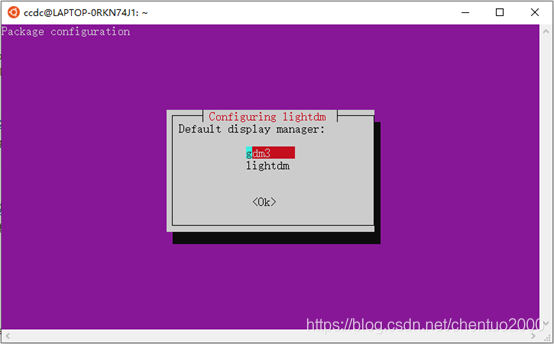
选gdm3
OK

startxfce4

有一些警告,不管它了。看Xfce4桌面:

然后就可以在Xfce4桌面中进行Linux系统的操作了。
例如运行xeyes:Applications > Run Program
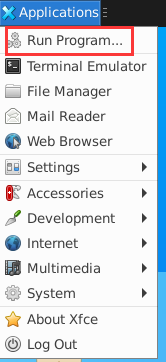
打开Application Finder窗口:
输入xeyes,点击Launch:

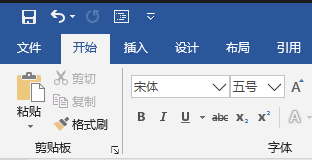
启用Xfce4之后Linux桌面就覆盖了Windows桌面,可以用Win键切换到其他的Windows程序。

默认情况下Xfce4桌面始终占据标题栏,导致其他程序显示不全。例如Word:

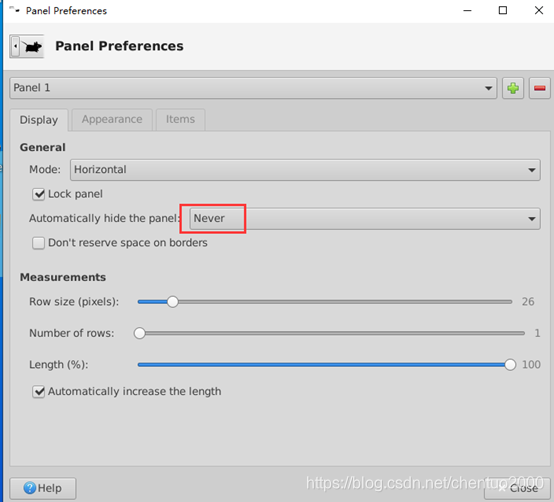
设置面板,让Xfce4隐藏标题栏:Applications > Settings > Panel

将下图中Automatically hide the panel的Never选项
改为Always
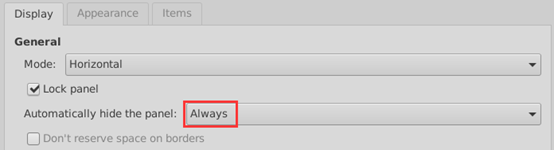
这样其他程序窗口就能显示全了,看效果。
参考文档
- 《为win10的linux子系统搭载图形界面(WSL安装桌面)》https://www.cnblogs.com/liangxuran/p/14274847.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)