Jetson TX2是NIVDIA瞄准人工智能在Jetson TK1和TX1推出后的升级
TX2的GPU和CPU都进行了升级,内存增加到了8GB、存储增加到了32GB,支持Wifi和蓝牙,编解码支持H.265,体型同样小巧。
据NVIDIA官方介绍,Jetson TX2提供两种运行模态:一种是MAX Q,能效比能达到最高,是上一代的TX1的2倍,功耗在7.5W以下;另一种是MAX P,性能可以做到最高,能效比同样可以做到前一代的2倍,功耗则在15W以下。
资源配置丰富且强大
1.模组配置
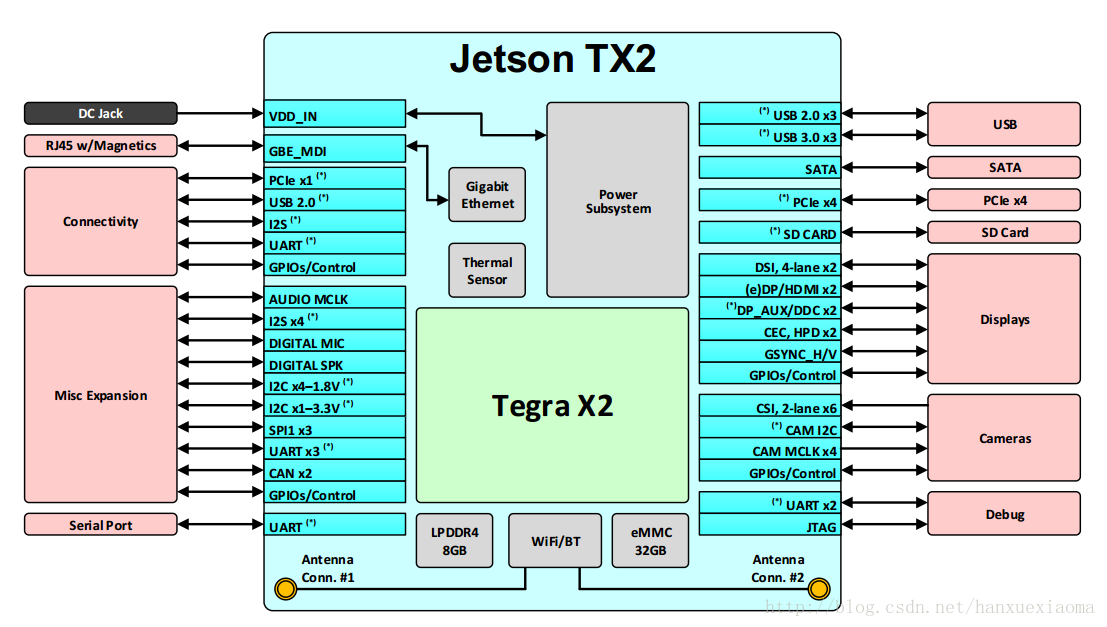
Jetson TX2的特点是NVIDIA Pascal GPU有256个CUDA有能力的核心。CPU复杂部分由两个ARM v8 64位CPU集群组成,它们由高性能的相干互连结构连接。为提高单线程性能,优化了丹佛2(双核)CPU集群;第二个CPU集群是一个ARM Cortex-A57 QuadCore,它更适合于多线程应用程序。
内存子系统包含一个128位的内存控制器,它提供高带宽LPDDR4支持。8 GB LPDDR4
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)