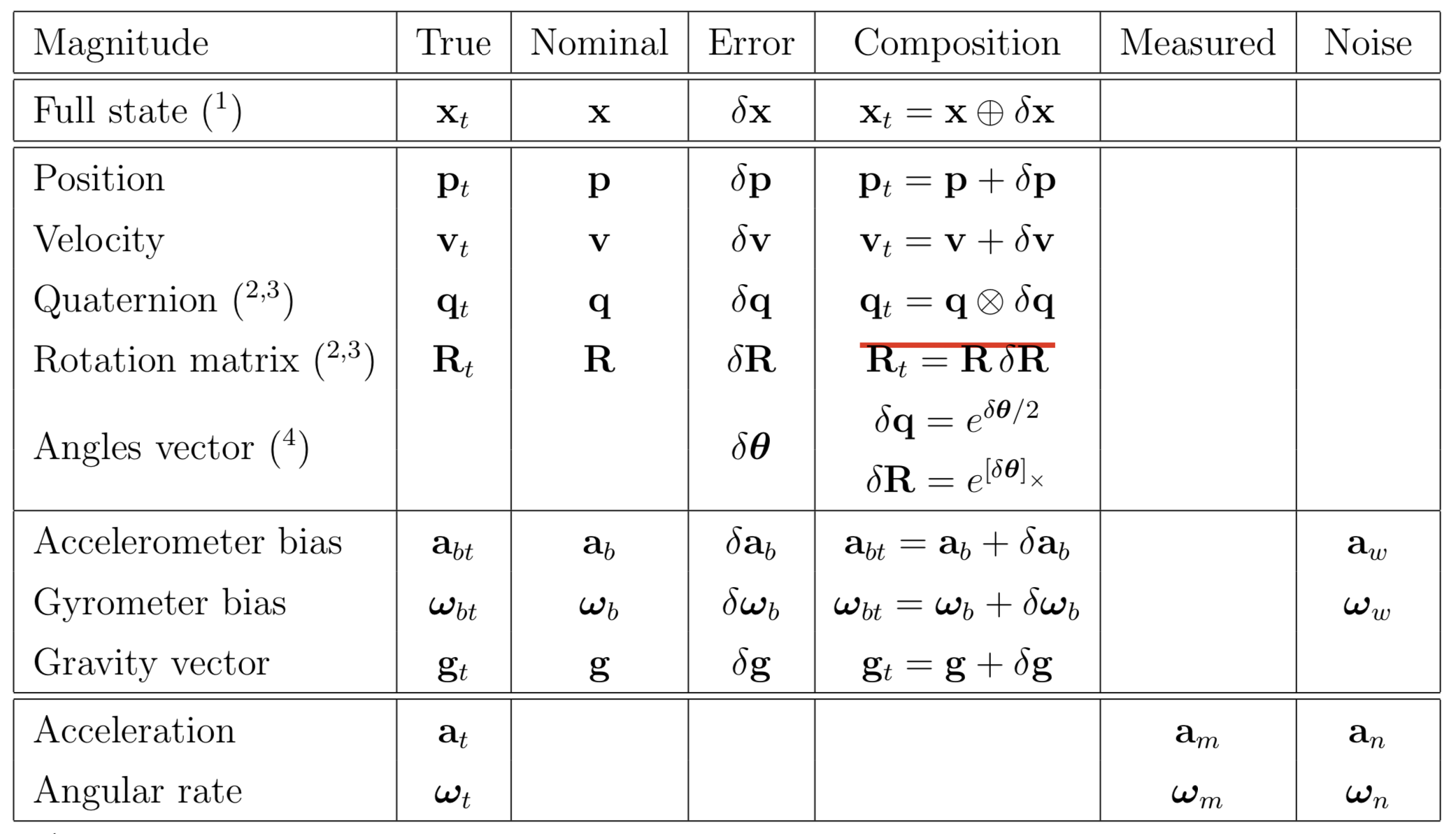
一般有两个坐标系:大地基准坐标系w系(或者G系)与机器人本体坐标系b系(或者I系),两坐标系之间的旋转矩阵表示为:
R
=
b
w
R
=
Exp
[
G
I
δ
θ
]
=
I
G
δ
q
R={ }_{b}^{w} R=\operatorname{Exp}\left[\begin{array}{l} G \\ { }_{I} \end{array} \delta \theta\right]={ }_{I}^{G} \delta q
R=bwR=Exp[GIδθ]=IGδq 坐标系计算的matlab方法:
clear
syms x y z g
Rx =[100;0 cos(x)-sin(x);0 sin(x) cos(x)];
Ry =[cos(y)0 sin(y);010;-sin(y)0 cos(y)];
Rz =[cos(z)-sin(z)0;
sin(z) cos(z)0;001];
Rwb = Rz*Ry*Rx;
Rwb.'*[0;0;g]
SLAM中的坐标系定义:
欧拉角角速度与陀螺仪测量的本体角速度之间(eulerRates与bodyRates)有如下关系:
d
d
t
[
ϕ
θ
ψ
]
=
[
1
sin
ϕ
tan
θ
cos
ϕ
tan
θ
0
cos
ϕ
−
sin
ϕ
0
sin
ϕ
/
cos
θ
cos
ϕ
/
cos
θ
]
ω
≜
W
(
θ
)
ω
\frac{\mathrm{d}}{\mathrm{d} t}\left[\begin{array}{l} \phi \\ \theta \\ \psi \end{array}\right]=\left[\begin{array}{ccc} 1 & \sin \phi \tan \theta & \cos \phi \tan \theta \\ 0 & \cos \phi & -\sin \phi \\ 0 & \sin \phi / \cos \theta & \cos \phi / \cos \theta \end{array}\right] \boldsymbol{\omega} \triangleq \boldsymbol{W}(\boldsymbol{\theta}) \boldsymbol{\omega}
dtd⎣⎡ϕθψ⎦⎤=⎣⎡100sinϕtanθcosϕsinϕ/cosθcosϕtanθ−sinϕcosϕ/cosθ⎦⎤ω≜W(θ)ω 这个关系常用于欧拉角的运动学更新中。其中,W是可逆矩阵。
2)几种表示姿态的方法
1. 四元数表示角度
更新
可以这样表示:
q
˙
e
b
(
t
)
=
1
2
[
0
−
ω
x
−
ω
y
−
ω
z
ω
x
0
ω
z
−
ω
y
ω
y
−
ω
z
0
ω
x
ω
z
ω
y
−
ω
x
0
]
q
e
b
(
t
)
\dot{q}_{e}^{b}(t)=\frac{1}{2}\left[\begin{array}{cccc} 0 & -\omega_{x} & -\omega_{y} & -\omega_{z} \\ \omega_{x} & 0 & \omega_{z} & -\omega_{y} \\ \omega_{y} & -\omega_{z} & 0 & \omega_{x} \\ \omega_{z} & \omega_{y} & -\omega_{x} & 0 \end{array}\right] q_{e}^{b}(t)
q˙eb(t)=21⎣⎢⎢⎡0ωxωyωz−ωx0−ωzωy−ωyωz0−ωx−ωz−ωyωx0⎦⎥⎥⎤qeb(t) 在MEKF算法的差分化之后,有这样的结果:
q
(
t
+
Δ
t
)
=
q
(
t
)
⊗
e
1
2
q
ω
Δ
t
=
q
(
t
)
(
1
+
1
/
2
∗
Ω
Δ
t
)
\boldsymbol{q}(t+\Delta t)=\boldsymbol{q}(t) \otimes e^{\frac{1}{2} \boldsymbol{q}_{\omega} \Delta t}=q(t)(1 + 1/2 *\Omega \Delta t)
q(t+Δt)=q(t)⊗e21qωΔt=q(t)(1+1/2∗ΩΔt) 也可以表示为:
q
b
,
b
k
⊗
δ
q
b
k
b
k
′
=
δ
q
b
,
b
k
⊗
[
1
1
2
δ
θ
b
k
b
k
]
\mathbf{q}_{b, b_{k}} \otimes \delta \mathbf{q}_{b_{k} b_{k}^{\prime}}=\delta \mathbf{q}_{b, b_{k}} \otimes\left[\begin{array}{c} 1 \\ \frac{1}{2} \delta \theta_{b_{k} b_{k}} \end{array}\right]
qb,bk⊗δqbkbk′=δqb,bk⊗[121δθbkbk] 这里面一个很重要的性质就是:
δ
q
=
[
1
1
2
δ
θ
]
\delta q=\left[\begin{array}{l}1 \\ \frac{1}{2} \delta \theta\end{array}\right]
δq=[121δθ]
四元数运算
四元数相乘可以写成:
q
1
⊗
q
2
=
[
q
]
L
q
2
=
[
q
]
R
q
\mathbf{q}_{1} \otimes \mathbf{q}_{2}=[\mathbf{q}]_{L} \mathbf{q}_{2}=[\mathbf{q}]_{R} \mathbf{q}
q1⊗q2=[q]Lq2=[q]Rq 其中
[
q
]
L
=
[
q
w
−
q
x
−
q
y
−
q
z
q
x
q
w
−
q
z
q
y
q
y
q
z
q
w
−
q
x
q
z
−
q
y
q
x
q
w
]
=
q
w
I
+
[
0
−
q
v
T
q
v
[
q
v
]
×
]
[\mathbf{q}]_{L}=\left[\begin{array}{cccc} q_{w} & -q_{x} & -q_{y} & -q_{z} \\ q_{x} & q_{w} & -q_{z} & q_{y} \\ q_{y} & q_{z} & q_{w} & -q_{x} \\ q_{z} & -q_{y} & q_{x} & q_{w} \end{array}\right]=q_{w} \mathbf{I}+\left[\begin{array}{cc} 0 & -\mathbf{q}_{v}^{\mathrm{T}} \\ \mathbf{q}_{v} & {\left[\mathbf{q}_{v}\right]_{\times}} \end{array}\right]
[q]L=⎣⎢⎢⎡qwqxqyqz−qxqwqz−qy−qy−qzqwqx−qzqy−qxqw⎦⎥⎥⎤=qwI+[0qv−qvT[qv]×]
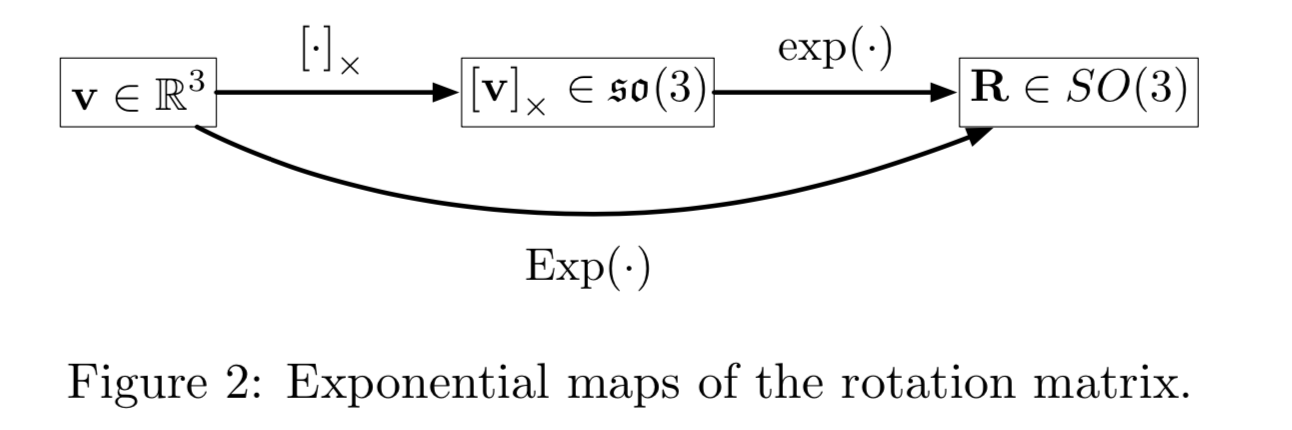
2. 李代数表示角度
旋转向量V与李群之间的转换,需要经过中间量“李代数”。
也可以用罗德里格斯旋转公式直接转换:
R
=
I
+
sin
ϕ
[
u
]
×
+
(
1
−
cos
ϕ
)
[
u
]
×
2
\mathbf{R}=\mathbf{I}+\sin \phi[\mathbf{u}]_{\times}+(1-\cos \phi)[\mathbf{u}]_{\times}^{2}
R=I+sinϕ[u]×+(1−cosϕ)[u]×2
描述旋转群与四元数之间的关系:参考文献1的 4.2.2
3. 链式求导方法
这个方法好像在eskf中用到的比较多,
H
≜
∂
h
∂
δ
x
∣
x
=
∂
h
∂
x
t
∣
x
∂
x
t
∂
δ
x
∣
x
=
H
x
X
δ
x
\left.\mathbf{H} \triangleq \frac{\partial h}{\partial \delta \mathbf{x}}\right|_{\mathbf{x}}=\left.\left.\frac{\partial h}{\partial \mathbf{x}_{t}}\right|_{\mathbf{x}} \frac{\partial \mathbf{x}_{t}}{\partial \delta \mathbf{x}}\right|_{\mathbf{x}}=\mathbf{H}_{\mathbf{x}} \mathbf{X}_{\delta \mathbf{x}}
H≜∂δx∂h∣∣∣∣x=∂xt∂h∣∣∣∣x∂δx∂xt∣∣∣∣x=HxXδx
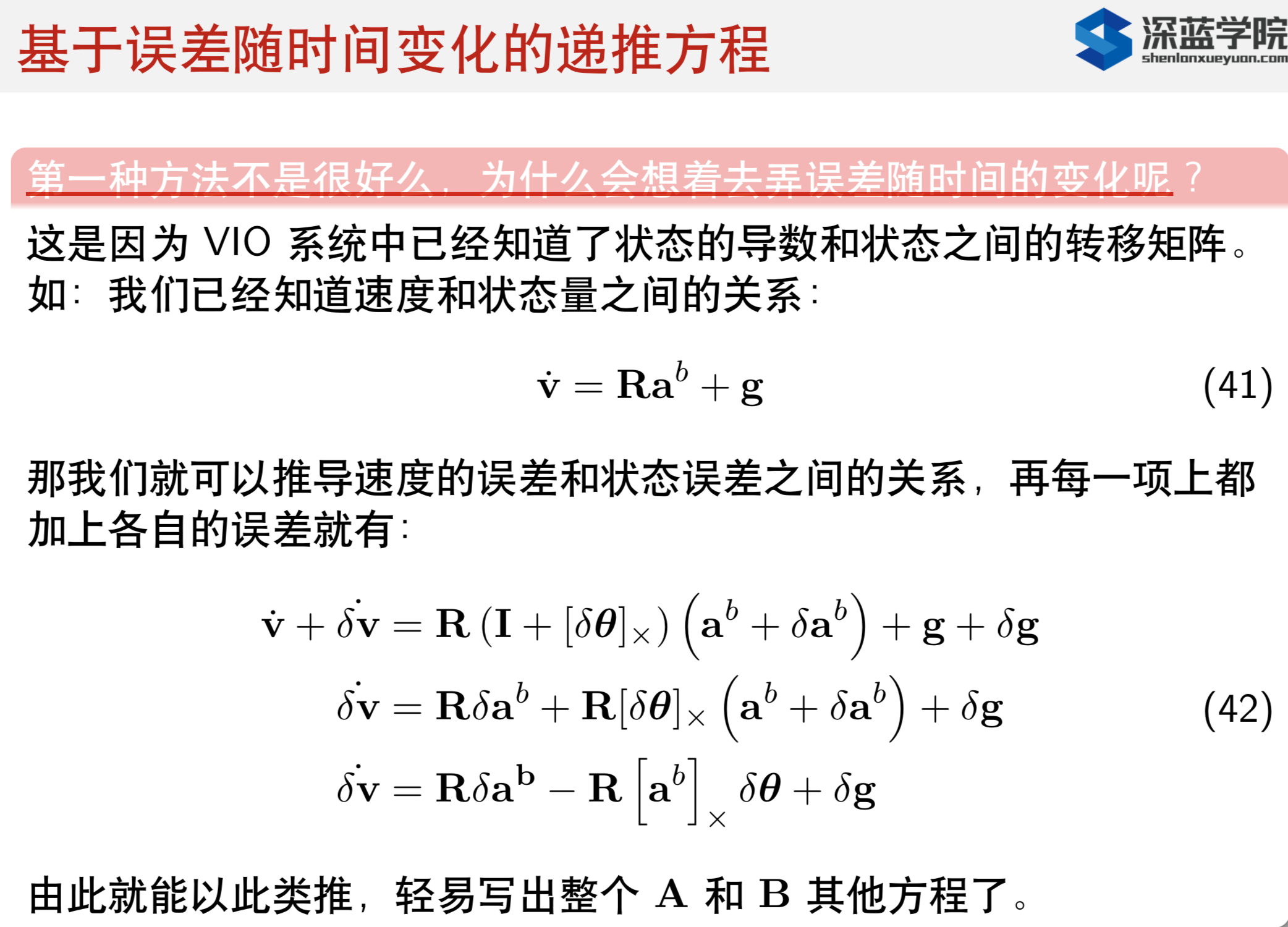
其中,下面的推导是怎么完成的?
δ
v
˙
=
R
δ
a
b
+
R
[
δ
θ
]
×
(
a
b
+
δ
a
b
)
+
δ
g
δ
v
˙
=
R
δ
a
b
−
R
[
a
b
]
×
δ
θ
+
δ
g
\begin{array}{l} \dot{\delta \mathbf{v}}=\mathbf{R} \delta \mathbf{a}^{b}+\mathbf{R}[\delta \boldsymbol{\theta}]_{\times}\left(\mathbf{a}^{b}+\delta \mathbf{a}^{b}\right)+\delta \mathbf{g} \\ \dot{\delta \mathbf{v}}=\mathbf{R} \delta \mathbf{a}^{\mathbf{b}}-\mathbf{R}\left[\mathbf{a}^{b}\right]_{\times} \delta \boldsymbol{\theta}+\delta \mathbf{g} \end{array}
δv˙=Rδab+R[δθ]×(ab+δab)+δgδv˙=Rδab−R[ab]×δθ+δg
最符合逻辑的就是:两个小量相乘,最后的结果就是无穷小,可以忽略。
与ESKF的区别是什么?下面给出ESKF的定义。
δ
v
˙
=
−
R
[
a
m
−
a
b
]
×
δ
θ
−
R
δ
a
b
+
δ
g
−
R
a
n
\dot{\delta \mathbf{v}}=-\mathbf{R}\left[\mathbf{a}_{m}-\mathbf{a}_{b}\right]_{\times} \delta \boldsymbol{\theta}-\mathbf{R} \delta \mathbf{a}_{b}+\delta \mathbf{g}-\mathbf{R} \mathbf{a}_{n}
δv˙=−R[am−ab]×δθ−Rδab+δg−Ran 实际上是一样的,不过在ESKF中多了Ran量。
Q
d
=
Q
c
Δ
t
Q
c
=
blkdiag
(
σ
a
c
c
2
)
Q_{d}=Q_{c} \Delta t \quad Q_{c}=\text {blkdiag}\left(\sigma_{a c c}^{2}\right)
Qd=QcΔtQc=blkdiag(σacc2)
为什么呢不一致呢?参考博客的内容,推断的计算方法如下:但是这里是白噪声还是随机游走?理论上应该是白噪声,因为没有讨论随机游走。
Q
c
Δ
t
∗
Δ
t
2
=
b
l
k
d
i
a
g
(
σ
g
y
r
o
2
)
Δ
t
∗
Δ
t
2
\frac{Q_{c}}{\Delta t} *{\Delta t}^{2}=\frac{b l k d i a g\left(\sigma_{g y r o}^{2}\right)}{\Delta t} *{\Delta t^{2}}
ΔtQc∗Δt2=Δtblkdiag(σgyro2)∗Δt2
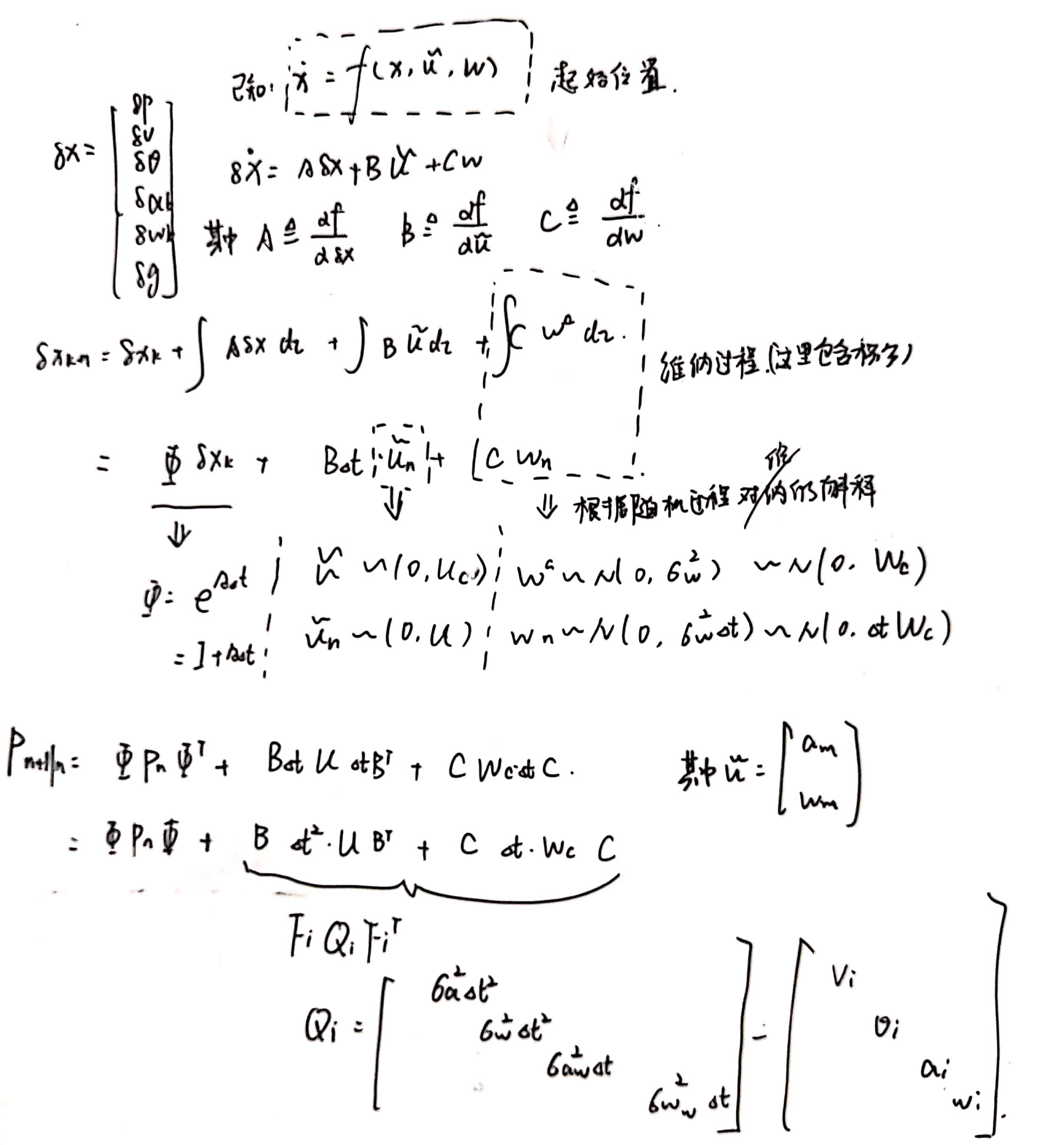
在博客和文献1,提到一种ESKF的姿态角度估计方法,对于Q的求解,给出下面的结果:
V
i
=
σ
a
n
2
Δ
t
2
I
Θ
i
=
σ
ω
n
2
Δ
t
2
I
A
i
=
σ
a
ω
2
Δ
t
I
Ω
i
=
σ
ω
ω
2
Δ
t
I
\begin{array}{l} \boldsymbol{V}_{i}=\sigma_{a_{n}}^{2} \Delta t^{2} \boldsymbol{I} \\ \mathbf{\Theta}_{i}=\sigma_{\omega_{n}}^{2} \Delta t^{2} \boldsymbol{I} \\ \boldsymbol{A}_{i}=\sigma_{a_{\omega}}^{2} \Delta t \boldsymbol{I} \\ \boldsymbol{\Omega}_{i}=\sigma_{\omega_{\omega}}^{2} \Delta t \boldsymbol{I} \end{array}
Vi=σan2Δt2IΘi=σωn2Δt2IAi=σaω2ΔtIΩi=σωω2ΔtI
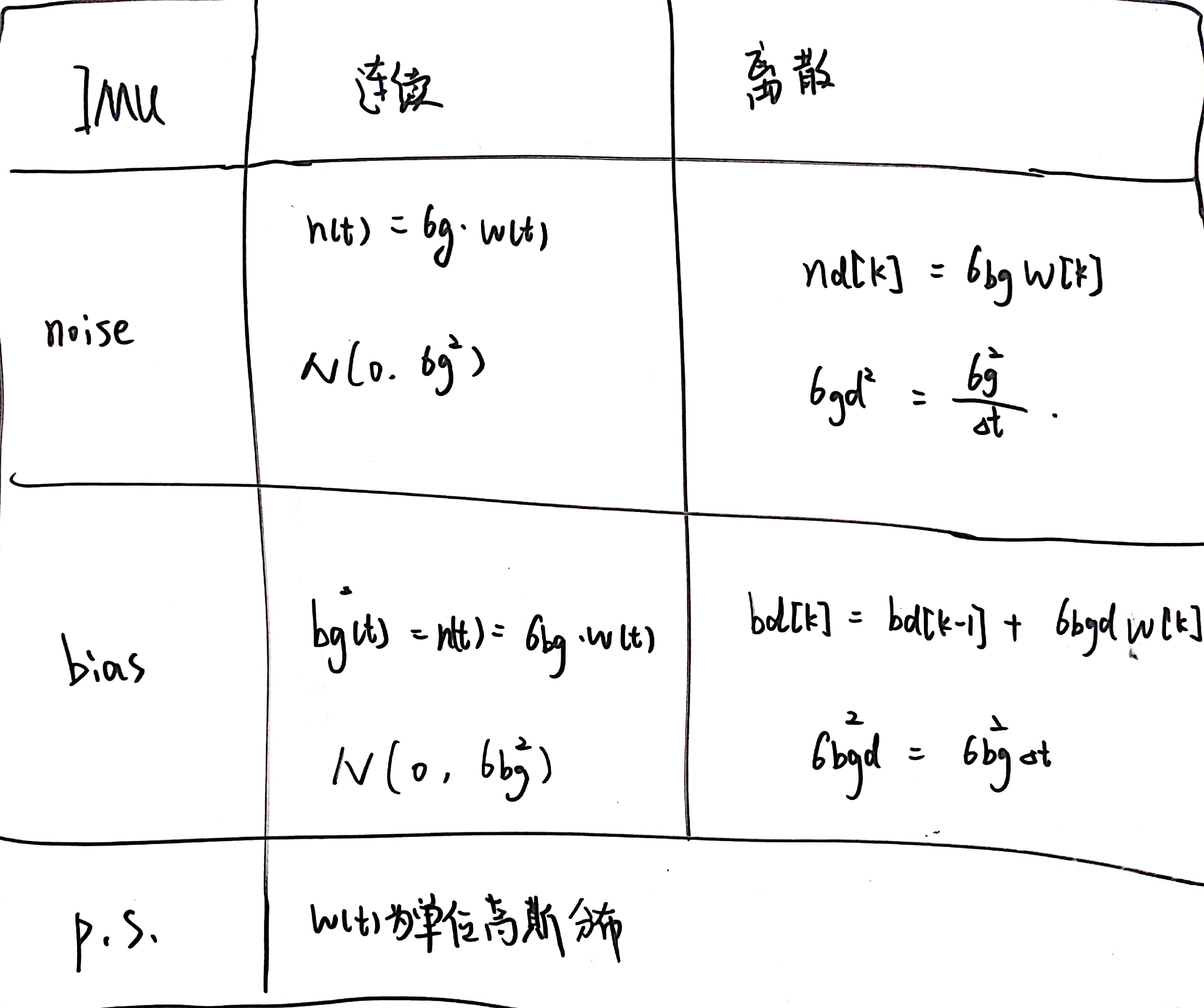
这里描述的方法也不一致,这就需要了解什么是连续的标准差和离散的标准差了。暂且以文献1为标准。
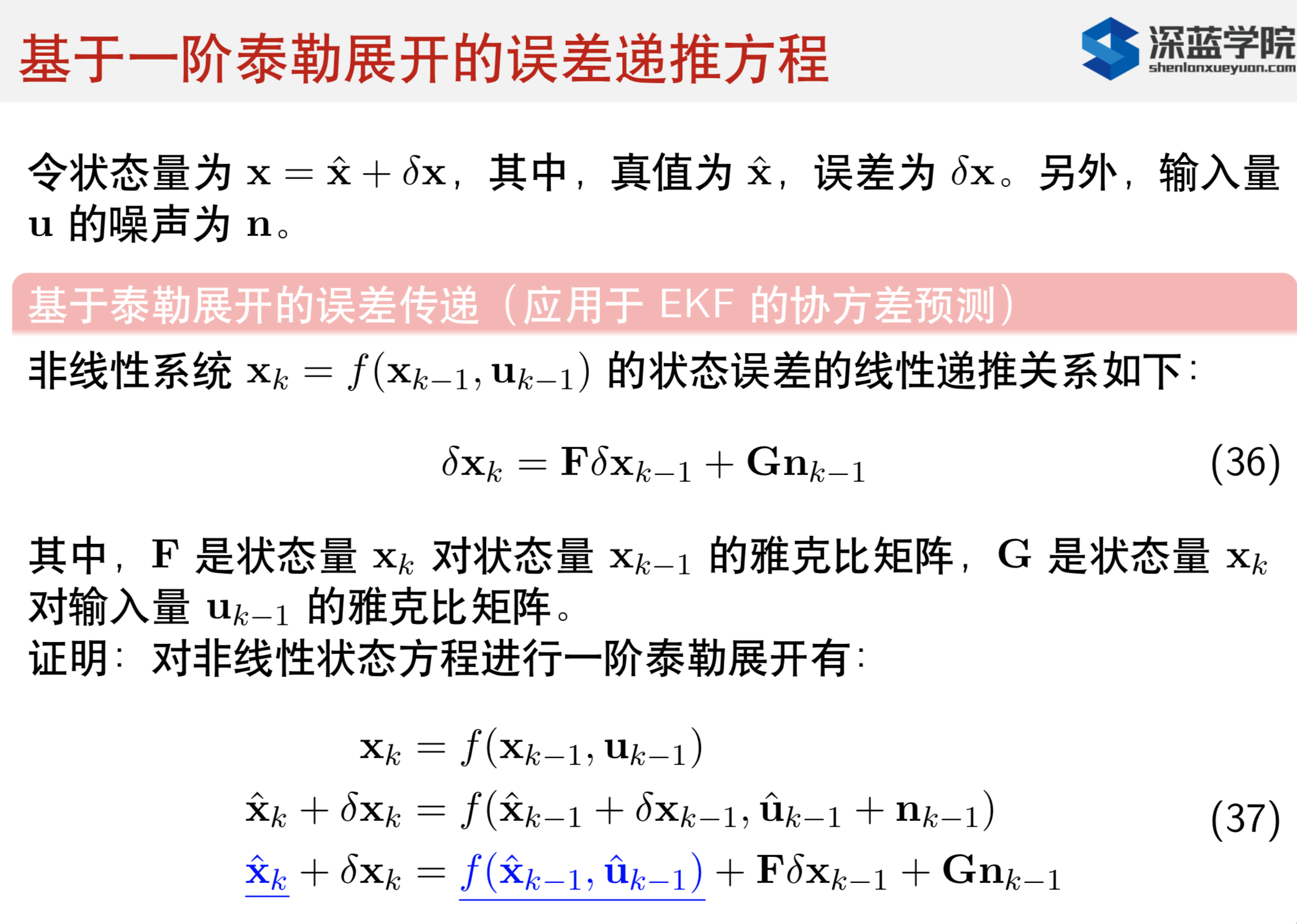
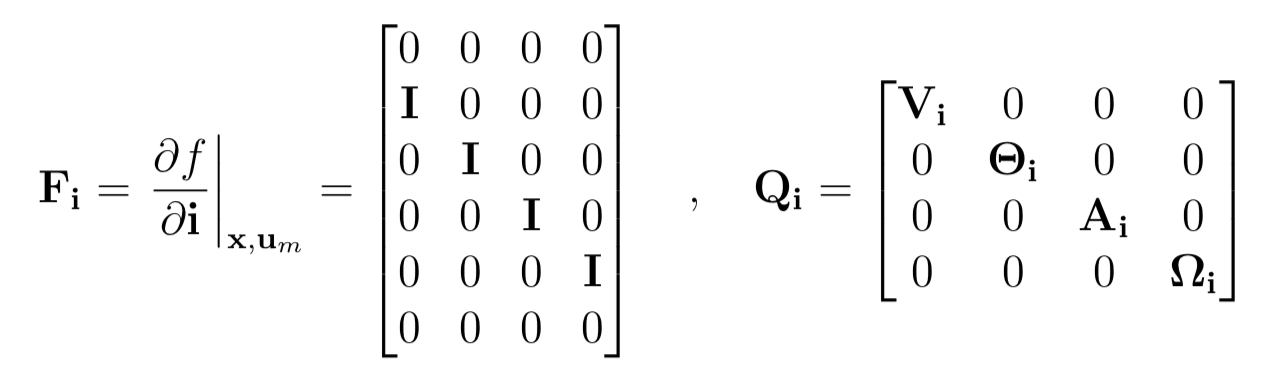
2. 如何确定协方差矩阵的更新?
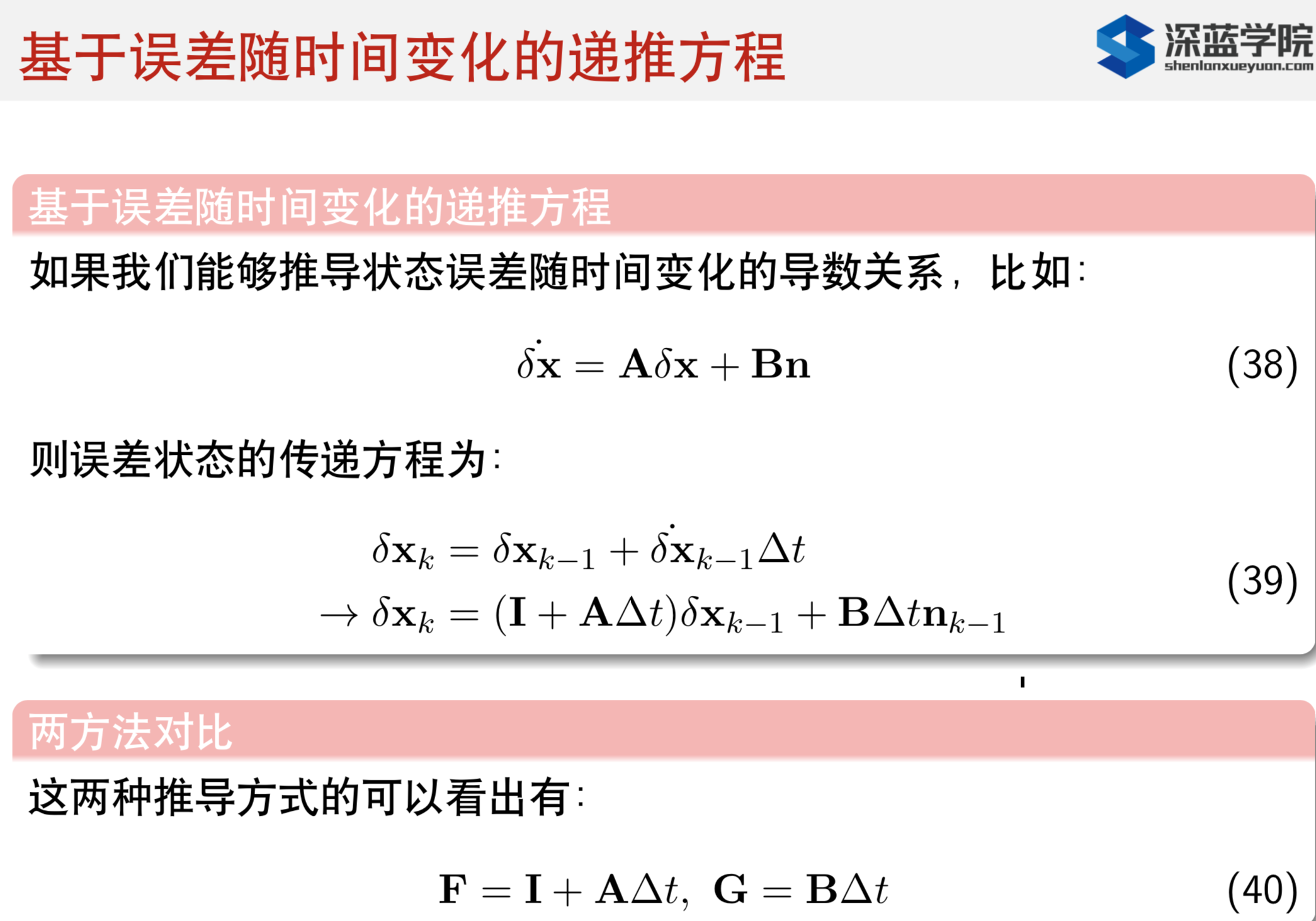
要推导预积分量的协方差,我们需要知道 imu 噪声和预积分量之间的线性递推关系。协方差矩阵可以这样推导:这个方差的积累公式需要注意一下,实际上状态估计大多都是这么做的。
Σ
i
k
=
F
k
−
1
Σ
i
k
−
1
F
k
−
1
⊤
+
G
k
−
1
Σ
n
G
k
−
1
⊤
\boldsymbol{\Sigma}_{i k}=\mathbf{F}_{k-1} \boldsymbol{\Sigma}_{i k-1} \mathbf{F}_{k-1}^{\top}+\mathbf{G}_{k-1} \boldsymbol{\Sigma}_{\mathbf{n}} \mathbf{G}_{k-1}^{\top}
Σik=Fk−1Σik−1Fk−1⊤+Gk−1ΣnGk−1⊤ 其中,
Σ
n
Σ_n
Σn 是测量噪声的协方差矩阵,方差从 i 时刻开始进行递推,
Σ
i
i
=
0
Σ_{ii} = 0
Σii=0。
sGPS =0.5*8.8*dt**2# assume 8.8m/s2 as maximum acceleration, forcing the vehicle
sCourse =0.1*dt # assume 0.1rad/s as maximum turn rate for the vehicle
sVelocity=8.8*dt # assume 8.8m/s2 as maximum acceleration, forcing the vehicle
sYaw =1.0*dt # assume 1.0rad/s2 as the maximum turn rate acceleration for the vehicle
Q = np.diag([sGPS**2, sGPS**2, sCourse**2, sVelocity**2, sYaw**2])
因此给出误差传播方程:
δ
p
←
δ
p
+
δ
v
Δ
t
δ
v
←
δ
v
+
(
−
R
[
a
m
−
a
b
]
×
δ
θ
−
R
δ
a
b
+
δ
g
)
Δ
t
+
v
i
δ
θ
←
R
⊤
{
(
ω
m
−
ω
b
)
Δ
t
}
δ
θ
−
δ
ω
b
Δ
t
+
θ
i
δ
a
b
←
δ
a
b
+
a
i
δ
ω
b
←
δ
ω
b
+
ω
i
δ
g
←
δ
g
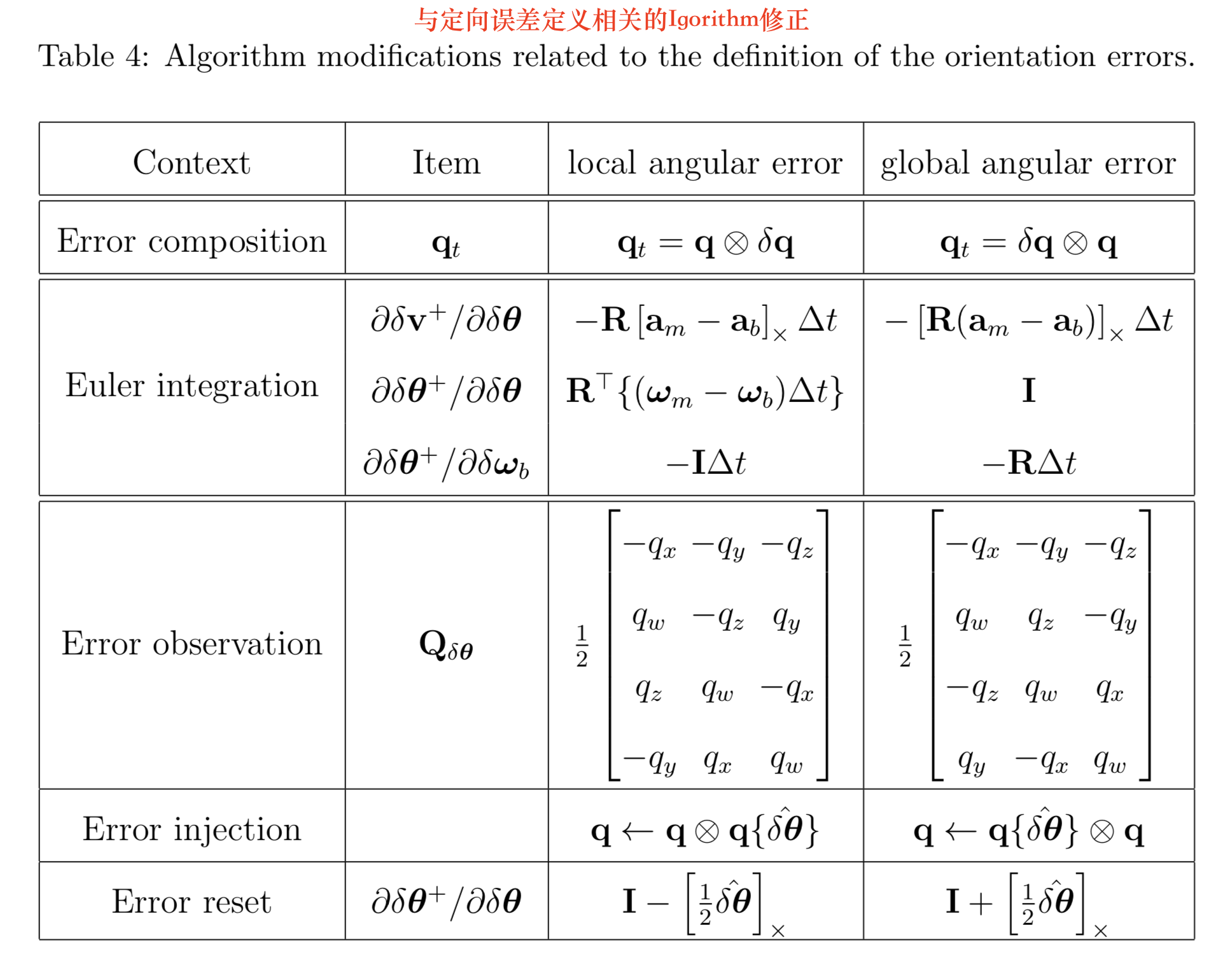
\begin{aligned} \delta \mathbf{p} & \leftarrow \delta \mathbf{p}+\delta \mathbf{v} \Delta t \\ \delta \mathbf{v} & \leftarrow \delta \mathbf{v}+\left(-\mathbf{R}\left[\mathbf{a}_{m}-\mathbf{a}_{b}\right]_{\times} \delta \boldsymbol{\theta}-\mathbf{R} \delta \mathbf{a}_{b}+\delta \mathbf{g}\right) \Delta t+\mathbf{v}_{\mathbf{i}} \\ \delta \boldsymbol{\theta} & \leftarrow \mathbf{R}^{\top}\left\{\left(\boldsymbol{\omega}_{m}-\boldsymbol{\omega}_{b}\right) \Delta t\right\} \delta \boldsymbol{\theta}-\delta \boldsymbol{\omega}_{b} \Delta t+\boldsymbol{\theta}_{\mathbf{i}} \\ \delta \mathbf{a}_{b} & \leftarrow \delta \mathbf{a}_{b}+\mathbf{a}_{\mathbf{i}} \\ \delta \boldsymbol{\omega}_{b} & \leftarrow \delta \boldsymbol{\omega}_{b}+\boldsymbol{\omega}_{\mathbf{i}} \\ \delta \mathbf{g} & \leftarrow \delta \mathbf{g} \end{aligned}
δpδvδθδabδωbδg←δp+δvΔt←δv+(−R[am−ab]×δθ−Rδab+δg)Δt+vi←R⊤{(ωm−ωb)Δt}δθ−δωbΔt+θi←δab+ai←δωb+ωi←δg
其次是测量方程:
测量方程求取雅可比矩阵采用链式法则。
此外有:
X
δ
x
≜
∂
x
t
∂
δ
x
∣
x
=
[
I
6
0
0
0
Q
δ
θ
0
0
0
I
9
]
\left.\mathbf{X}_{\delta \mathbf{x}} \triangleq \frac{\partial \mathbf{x}_{t}}{\partial \delta \mathbf{x}}\right|_{\mathbf{x}}=\left[\begin{array}{ccc} \mathbf{I}_{6} & 0 & 0 \\ 0 & \mathbf{Q}_{\delta \boldsymbol{\theta}} & 0 \\ 0 & 0 & \mathbf{I}_{9} \end{array}\right]
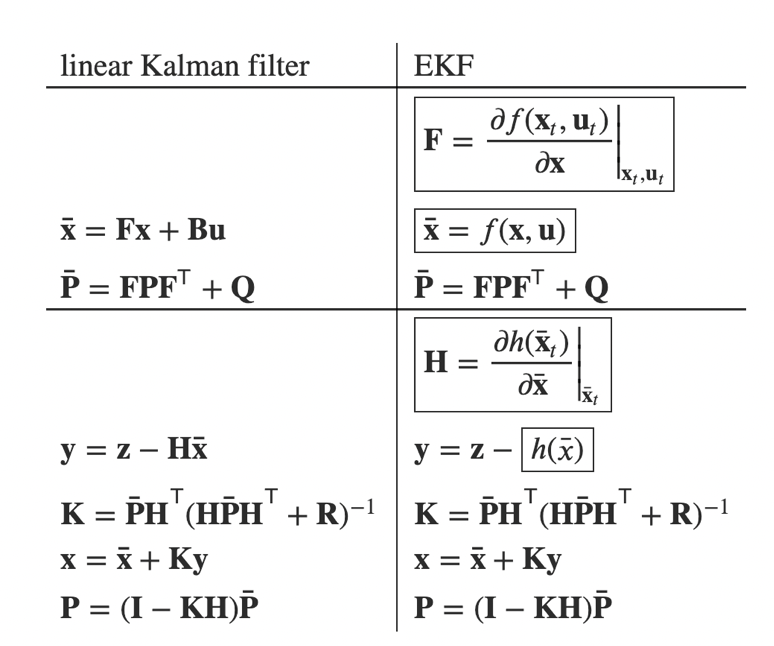
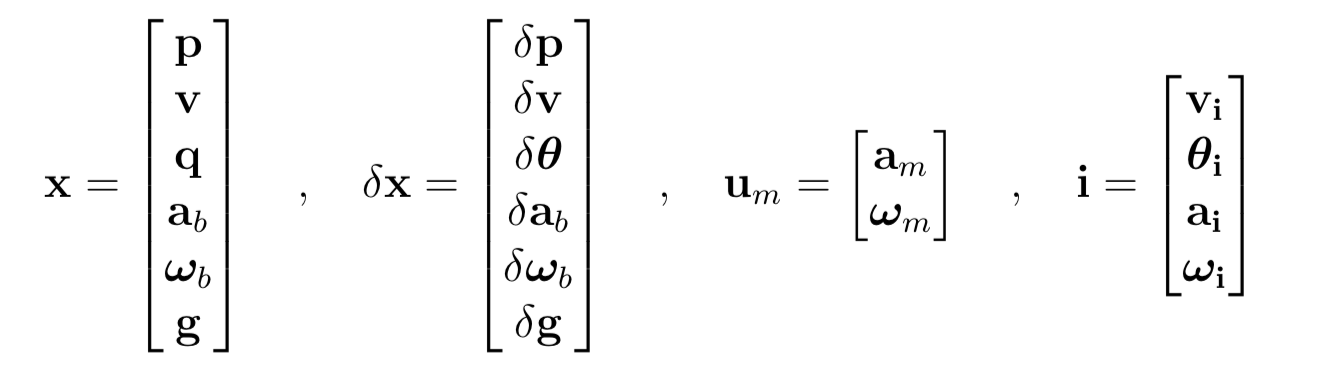
Xδx≜∂δx∂xt∣∣∣∣x=⎣⎡I6000Qδθ000I9⎦⎤ 总结来说,求取差分的偏导数如下,需要注意的是,我用到的是左栏的结果,右栏中未作考虑。
4)kalman滤波实例
参考github项目(yds16)
角速度积分表示:
I
G
R
˙
=
I
G
R
[
ω
m
−
b
g
−
n
w
]
×
b
˙
g
=
0
+
n
g
\begin{aligned} _{I}^{G} \dot{\boldsymbol{R}} &=_{I}^{G} \boldsymbol{R}\left[\boldsymbol{\omega}_{m}-\boldsymbol{b}_{g}-\boldsymbol{n}_{w}\right] \times \\ \dot{\boldsymbol{b}}_{g} &=\mathbf{0}+\boldsymbol{n}_{g} \end{aligned}
IGR˙b˙g=IGR[ωm−bg−nw]×=0+ng 下面是旋转矩阵的积分过程:
d
R
d
t
=
R
[
ω
]
×
\frac{\mathrm{d} \mathbf{R}}{\mathrm{d} t}=\mathbf{R}[\boldsymbol{\omega}]_{\times}
dtdR=R[ω]× 得到离散化之后的:
R
(
t
+
Δ
t
)
=
R
(
t
)
e
[
ω
]
×
Δ
t
\mathbf{R}(t+\Delta t)=\mathbf{R}(t) e^{[\omega]_{\times} \Delta t}
R(t+Δt)=R(t)e[ω]×Δt
参考EKF-Based IMU Orientation Estimation,有下面的运动学方程:
δ
θ
=
Exp
[
(
ω
m
−
b
g
)
Δ
t
]
T
δ
θ
−
δ
b
g
Δ
t
+
θ
i
δ
b
g
=
δ
b
g
+
ω
i
\begin{aligned} \delta \boldsymbol{\theta} &=\operatorname{Exp}\left[\left(\boldsymbol{\omega}_{m}-\boldsymbol{b}_{g}\right) \Delta t\right]^{T} \delta \boldsymbol{\theta}-\delta \boldsymbol{b}_{g} \Delta t+\boldsymbol{\theta}_{i} \\ \delta \boldsymbol{b}_{g} &=\delta \boldsymbol{b}_{g}+\boldsymbol{\omega}_{i} \end{aligned}
δθδbg=Exp[(ωm−bg)Δt]Tδθ−δbgΔt+θi=δbg+ωi 表示为:
[
δ
θ
δ
b
g
]
=
[
Exp
[
(
ω
m
−
b
g
)
Δ
t
]
T
−
I
Δ
t
0
I
]
⏟
F
x
[
δ
θ
δ
b
g
]
+
[
I
0
0
I
]
⏟
F
i
[
θ
i
ω
i
]
\left[\begin{array}{c} \delta \boldsymbol{\theta} \\ \delta \boldsymbol{b}_{g} \end{array}\right]=\underbrace{\left[\begin{array}{cc} \operatorname{Exp}\left[\left(\boldsymbol{\omega}_{m}-\boldsymbol{b}_{g}\right) \Delta t\right]^{T} & -\boldsymbol{I} \Delta t \\ \boldsymbol{0} & \boldsymbol{I} \end{array}\right]}_{\boldsymbol{F}_{\boldsymbol{x}}}\left[\begin{array}{c} \boldsymbol{\delta} \boldsymbol{\theta} \\ \delta \boldsymbol{b}_{g} \end{array}\right]+\underbrace{\left[\begin{array}{cc} \boldsymbol{I} & \boldsymbol{0} \\ \boldsymbol{0} & \boldsymbol{I} \end{array}\right]}_{\boldsymbol{F}_{i}}\left[\begin{array}{c} \boldsymbol{\theta}_{i} \\ \boldsymbol{\omega}_{i} \end{array}\right]
[δθδbg]=Fx[Exp[(ωm−bg)Δt]T0−IΔtI][δθδbg]+Fi[I00I][θiωi]
进行kalman滤波更新即可。
5)实现代码
参考项目;
%=========================================================================%% ESKF的实现
%%%=========================================================================%%(C)2020-2022 China Academy of Railway Sciences
% 版本:V1.0% 日期:2020年 6月23日
% 作者:s.m.%--------------------------------------------------------------------------% 功能:1.实现ESKF算法,加深对于状态估计的理解
%2.其中的问题:
%1) 测量加上地磁计
%2) 注意误差量与标称量
%3) 四元数转角度时有误差,就是这个导致了误差量
%%%%--------------------------------------------------------------------------
clear all;
close all;
addpath('../../ESKF-Attitude-Estimation-master')
addpath('../utils')%--------------------import data-------------------
fileName ='../NAV_1';
Data = importdata(sprintf('%s.mat',fileName));
lengthtp = size(Data,1);
time = zeros(lengthtp,1);
roll = zeros(lengthtp,1);
pitch = zeros(lengthtp,1);
yaw = zeros(lengthtp,1);
imuNominalStates = cell(1,lengthtp);
imuErrorStates = cell(1,lengthtp);
measurements = cell(1,lengthtp);%groundTruth
for state_k =1:lengthtp
measurements{state_k}.dt =0.02;% sampling times 50Hz
measurements{state_k}.omega = Data(state_k,27:29)';
measurements{state_k}.acc = Data(state_k,9:11)';
measurements{state_k}.mag = Data(state_k,15:17)';
time(state_k)=state_k*0.02;
end
rad2deg =180/pi;
rollRef = Data(:,30)*rad2deg;
pitchRef = Data(:,31)*rad2deg;
yawRef = Data(:,32)*rad2deg;%--------------------Data analysis------------------%++++++++++++++++++++1.initialization++++++++++++++++
dt = measurements{1}.dt;% 怎么处理初始化的theta?
omega_b = zeros(3,1);%%这个用到
theta = zeros(3,1);%%这个用不到
% error state initialization
dt_theta = zeros(3,1);
dt_omega_b = zeros(3,1);% Keep updated status
err_state =[dt_theta;dt_omega_b];
quat = zeros(4,1);%--------Refer to previous practice for initialization-----------------------------------
init_angle =[Data(1,30),Data(1,31),Data(1,32)]';
init_quat = oula2q(init_angle);
quat = init_quat';%-------------------------2.covariance matrix ---------------------
p1 =1e-5;p2 =1e-7;
P = blkdiag(p1,p1,p1,p2,p2,p2);%%初始化
sigma_wn =1e-5;
sigma_wbn =1e-9;
Theta_i = sigma_wn*dt^2*eye(3);
Omega_i = sigma_wbn*dt^2*eye(3);
Fi = eye(6);
Qi = blkdiag(Theta_i , Omega_i);
Q = Fi*Qi*Fi';
sigma_acc =1e-3;
sigma_mn =1e-4;
R = blkdiag(eye(3)*sigma_acc,eye(3)*sigma_mn);for index =1:lengthtp-1%--------------------------forecast------------
omega_m =(measurements{index+1}.omega + measurements{index}.omega)/2;
av =(omega_m - omega_b)*dt;
det_q =[1;0.5*av];
quat = quatLeftComp(quat)*det_q;
omega_b = omega_b;% 计算标称值
F1 = Exp_lee((measurements{index+1}.omega - omega_b)*dt);
F1 = F1';
Fx =[F1 ,-eye(3)*dt;
zeros(3), eye(3)];
P_ = Fx*P*Fx' + Q;%-----------------------observation---------------------% Prediction results and observations
[H,detZ]= calH(quat, measurements{index+1});%--------------------update-----------------
K = P_*H'*inv(H*P_*H'+ R)/2;
err_state = K*detZ;
P = P_ - K*(H*P_*H' + R)*K';%----------------------update state----------------------% 参考之前的函数,dt_theta-->quat, quat的左乘方法
dt_theta = err_state(1:3);
dt_omega_b = err_state(4:6);
dt_q = buildUpdateQuat(dt_theta);
quat = quatLeftComp(quat)*dt_q;
quat = quat/norm(quat);
omega_b = omega_b + dt_omega_b;%------save angle-----------------------------[a1,a2,a3]= quattoeuler(quat);
oula(index+1,:)=[a1,a2,a3]/180*pi;
dt_theta_save(index+1,:)= err_state';%----------------------------reset-------------------
err_state = zeros(6,1);
G = blkdiag(eye(3)- omegaMatrix(dt_theta/2),eye(3));
P = G*P*G';
end
% figure;% subplot(3,1,1)% plot(pitchRef);% hold on;plot(oula(:,2)/pi*180);% subplot(3,1,2)% plot(rollRef);% hold on;plot(oula(:,1)/pi*180);% subplot(3,1,3)% plot(yawRef);% hold on;plot(oula(:,3)/pi*180);% legend 12
rotLim =[-55];
figure;
subplot(3,1,1)
plot(oula(:,1)/pi*180- rollRef);
subplot(3,1,2)
plot(oula(:,2)/pi*180- pitchRef);
subplot(3,1,3)
plot(oula(:,3)/pi*180- yawRef);
legend 12% ylim(rotLim)
function R = q2R(q)%四元数转旋转矩阵
R=[2*q(1).^2-1+2*q(2)^22*(q(2)*q(3)-q(1)*q(4))2*(q(2)*q(4)+q(1)*q(3));2*(q(2)*q(3)+q(1)*q(4))2*q(1)^2-1+2*q(3)^22*(q(3)*q(4)-q(1)*q(2));2*(q(2)*q(4)-q(1)*q(3))2*(q(3)*q(4)+q(1)*q(2))2*q(1)^2-1+2*q(4)^2];
R2 = R;
end
function Q_dt_theta = cal_Q_dt_theta(quat)
Q_dt_theta =0.5*[-quat(2)-quat(3)-quat(4);...
quat(1)-quat(4) quat(3);...
quat(4) quat(1)-quat(2);...-quat(3) quat(2) quat(1)];
end
function F = Exp_lee(in)
S = omegaMatrix(in);
normV = sqrt(S(1,2)^2+S(1,3)^2+S(1,3)^2);
F = eye(3)+sin(normV)/normV*S(:,:)+...(1-cos(normV))/normV^2*S(:,:)^2;
end
function [omega]=omegaMatrix(data)% wx=data(1)*pi/180;% wy=data(2)*pi/180;% wz=data(3)*pi/180;
wx=data(1);
wy=data(2);
wz=data(3);
omega=[0,-wz,wy;
wz,0,-wx;-wy,wx,0];
end
function q = R2q(R)%旋转矩阵转四元数
t=sqrt(1+R(1,1)+R(2,2)+R(3,3))/2;
q=[t (R(3,2)-R(2,3))/(4*t)(R(1,3)-R(3,1))/(4*t)(R(2,1)-R(1,2))/(4*t)];
Q1 = q;
end
function q = oula2q(in)
x =in(1);
y =in(2);
z =in(3);%欧拉角转四元数
q =[cos(x/2)*cos(y/2)*cos(z/2)+ sin(x/2)*sin(y/2)*sin(z/2)...
sin(x/2)*cos(y/2)*cos(z/2)- cos(x/2)*sin(y/2)*sin(z/2)...
cos(x/2)*sin(y/2)*cos(z/2)+ sin(x/2)*cos(y/2)*sin(z/2)...
cos(x/2)*cos(y/2)*sin(z/2)- sin(x/2)*sin(y/2)*cos(z/2)];
end
function Ang3 = q2oula(q)%四元数转欧拉角
x = atan2(2*(q(1)*q(2)+q(3)*q(4)),1-2*(q(2)^2+q(3)^2));
y = asin(2*(q(1)*q(3)- q(2)*q(4)));
z = atan2(2*(q(1)*q(4)+q(2)*q(3)),1-2*(q(3)^2+q(4)^2));
Ang3 =[x y z];
end
function updateQuat = buildUpdateQuat(deltaTheta)
deltaq =0.5* deltaTheta;
updateQuat =[1; deltaq];
updateQuat = updateQuat / norm(updateQuat);
end
function qLC = quatLeftComp(quat)
vector = quat(2:4);
scalar = quat(1);
qLC =[ scalar ,-vector';
vector , scalar*eye(3)+ crossMat(vector)];
end
function [H,detZ]= calH(q,measurements_k)% Normalise magnetometer measurement
if(norm(measurements_k.mag)==0),return; end %
measurements_k.mag = measurements_k.mag / norm(measurements_k.mag);% normalise magnitude,very important!!!!
% Normalise accelerometer measurement
if(norm(measurements_k.acc)==0),return; end % handle NaN
measurements_k.acc = measurements_k.acc / norm(measurements_k.acc);% normalise accelerometer ,very important!!!!
% Reference direction of Earth's magnetic feild
h = quaternProd(q, quaternProd([0; measurements_k.mag], quatInv(q)));
b =[0 norm([h(2) h(3)])0 h(4)];
Ha =[2*q(3),-2*q(4),2*q(1),-2*q(2)-2*q(2),-2*q(1),-2*q(4),-2*q(3)0,4*q(2),4*q(3),0];
Hm =[-2*b(4)*q(3),2*b(4)*q(4),-4*b(2)*q(3)-2*b(4)*q(1),-4*b(2)*q(4)+2*b(4)*q(2)-2*b(2)*q(4)+2*b(4)*q(2),2*b(2)*q(3)+2*b(4)*q(1),2*b(2)*q(2)+2*b(4)*q(4),-2*b(2)*q(1)+2*b(4)*q(3)2*b(2)*q(3),2*b(2)*q(4)-4*b(4)*q(2),2*b(2)*q(1)-4*b(4)*q(3),2*b(2)*q(2)];
Hx =[Ha, zeros(3,3)
Hm, zeros(3,3)];% Hx =[Ha, zeros(3,3)];
Q_detTheta =[-q(2),-q(3),-q(4)
q(1),-q(4), q(3)
q(4), q(1),-q(2)-q(3), q(2), q(1)];
Xx =[0.5*Q_detTheta , zeros(4,3)
zeros(3), eye(3)];
H = Hx*Xx;
detZ_a =[2*(q(2)*q(4)- q(1)*q(3))+ measurements_k.acc(1)2*(q(1)*q(2)+ q(3)*q(4))+ measurements_k.acc(2)2*(0.5- q(2)^2- q(3)^2)+ measurements_k.acc(3)];% detZ = detZ_a;
detZ_m =[((2*b(2)*(0.5- q(3)^2- q(4)^2)+2*b(4)*(q(2)*q(4)- q(1)*q(3)))+ measurements_k.mag(1))((2*b(2)*(q(2)*q(3)- q(1)*q(4))+2*b(4)*(q(1)*q(2)+ q(3)*q(4)))+ measurements_k.mag(2))((2*b(2)*(q(1)*q(3)+ q(2)*q(4))+2*b(4)*(0.5- q(2)^2- q(3)^2))+ measurements_k.mag(3))];
detZ =[detZ_a;detZ_m];
end
function [roll,pitch,yaw]= quattoeuler(q)
rad2deg=180/pi;
T=[1-2*(q(4)*q(4)+ q(3)* q(3))2*(q(2)* q(3)+q(1)* q(4))2*(q(2)* q(4)-q(1)* q(3));2*(q(2)* q(3)-q(1)* q(4))1-2*(q(4)*q(4)+ q(2)* q(2))2*(q(3)* q(4)+q(1)* q(2));2*(q(2)* q(4)+q(1)* q(3))2*(q(3)* q(4)-q(1)* q(2))1-2*(q(2)*q(2)+ q(3)* q(3))];%cnb
roll = atan2(T(2,3),T(3,3))*rad2deg;
pitch = asin(-T(1,3))*rad2deg;
yaw = atan2(T(1,2),T(1,1))*rad2deg-8.3;%%这个固定偏差是什么鬼
yaw = atan2(T(1,2),T(1,1))*rad2deg;%%这个固定偏差是什么鬼
end
参考文献:
Quaternion kinematics for the error-state Kalman Filter.pdf ↩︎ ↩︎