文章目录
- 前言
- ROS创建节点与编译
- 创建工作空间
- (1)创建和初始化
- (2)编译
- (3)为新建的工作空间配置系统环境
- ros功能包的创建
- 1:自定义功能包的创建
- 2:在github上下载功能包源码
- ROS功能包常用指令
- 1:rospack profile
- 2:rospack find [功能包名]
- 3:rospack depends [功能包]
- 4:rosls [功能包]
- 4:roscd [功能包]
前言
记录个人学习ros的历程。研究方向为无人机。
ROS创建节点与编译

创建工作空间
(1)创建和初始化
mkdir -p ~catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
通过上面命令创建一个空的ROS工作空间,其中包含一个CMakeList.txt文件(源文件空间配置文件,由catkin_init_workspace命令生成)
(2)编译
cd ~/catkin_ws/src
catkin_make
现在就可以看见make命令创建的build和devel文件夹。
build文件:该目录为编译空间,在使用camke和catkin等工具进行编译时存储缓存信息,配置和其他中间件
devel文件:这个目录为开放空间用来保存编译完成的功能包,这些功能包可以在无须安装的情况下进行测试。
src文件:这个目录作为代码空间。
(3)为新建的工作空间配置系统环境
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
这句话的目的就是在开新的terminal的时候,运行这个setup.bash,而这个setup.bash的作用是让一些ROS*开头的命令可以使用。
在工作空间的devel文件夹中存在几个setup.*sh形式的环境变量设置脚本。使用source命令运行这些脚本文件,则工作空间的环境变量设置可以生效(如可以找到该工作空间内的项目)
ros功能包的创建
1:自定义功能包的创建
cd ~/catkin_ws/src
ros_create_pkg [功能包] [依赖项]
2:在github上下载功能包源码
ROS功能包常用指令
1:rospack profile
向我们提供新添加到ROS功能包信息。
2:rospack find [功能包名]
这条命令可以帮助我们找到指定功能包路径

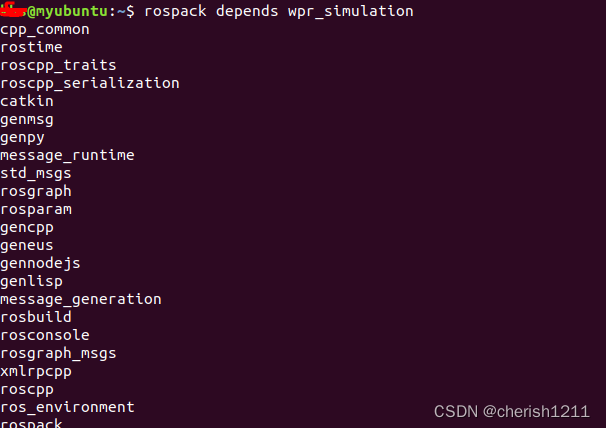
3:rospack depends [功能包]
用于检索功能包依赖项
4:rosls [功能包]
用来显示指定功能包的内容

4:roscd [功能包]
在终端打开指定工作包的工作目录

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)