由于工作需要,最近开启了GNSS系列文章的撰写工作,发布于公司官网,现将其同步至CSDN。
原文链接:
http://onemo10086.com/#/school/article/196
小伙伴们,大家好,我们继续讨论GNSS相关的知识,上期我们讨论如何在地图上显示出正确的GNSS位置,但总有小伙伴反馈定位的位置不准确,存在漂移。这期我们就来重点讨论讨论GNSS漂移是如何产生。
一、GNSS定位原理
在讨论GNSS漂移之前,先大致讲讲GNSS定位的基本原理。
GNSS(Global Navigation Satellite System)泛指所有的卫星导航系统。顾名思义就是利用天上的卫星来获取位置信息。下面以美国的GPS系统为例,讲解是如何通过卫星获取位置信息。其它系统:北斗、伽利略、GLONASS等类似。
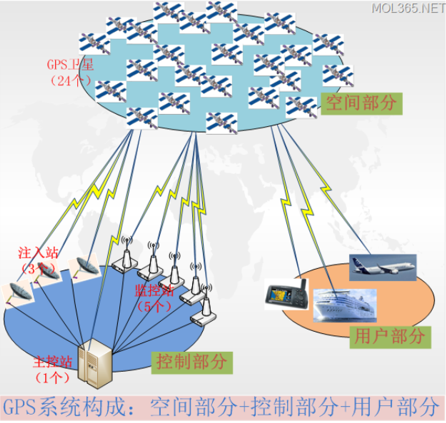
GPS系统由三部分组成:
1、空间部分:24颗中轨道卫星(实际上不止24颗);
2、控制部分:地面上的注入站、监控站、主控站等;
3、用户部分:各类GPS定位终端,如手机、GPS导航器等。
根据立体几何知识,用户机只要接收到3颗卫星,根据距这3颗卫星的距离和卫星位置,就可以计算自己的位置。即以3颗卫星为球心、距离为半径各自画球面,3球面交汇的地方即是用户机位置(X,Y,Z)。
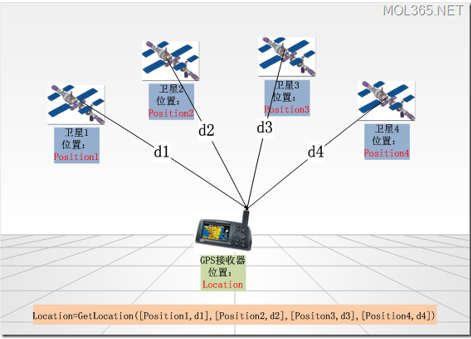
卫星的位置和距离从哪里来?卫星的位置很容易得到。实际上,运行于宇宙空间的GPS卫星,每一个都在时刻不停地向全球广播自己的当前位置坐标信息。任何一个GPS接收器都可以通过天线很轻松地接收到这些信息,并且能够读懂这些信息(GPS芯片的核心功能之一)。
距离哪里来的呢?GPS卫星除了在广播自己的当前位置坐标外,还会附加上该数据包发出时的时间戳。GPS接收器收到数据包后,用当前时间减去时间戳上的时间,就是数据包在空中传输所用的时间了。知道了传输时间再乘以传输速度(即光速),就得到了距离。
根据立体几何知识,理论上只需要3颗卫星就够了,但实际上至少的需要4颗卫星。通过增加卫星数来消除误差,这是因为:
1、传输速度为光速,非常大,要求时间非常精确才行。卫星上的时钟可以使用高精度昂贵的銫原子钟,但不可能给每个GPS接收器也配置一个銫原子钟,只能使用低成本精度低一些的时钟。计算得到的是传输时间就必然存在误差。
2、传输速度也会受到空气中电离层的引起,带来误差。GPS卫星广播的自己位置也会存在误差。
二、引起GPS漂移的因素
1、时钟误差
包含卫星时钟误差和GPS时钟误差。产生误差原因上面已经讲过,不再赘述。
2、星历误差
即卫星轨道位置误差。进行GPS定位时,计算在某时刻GPS卫星位置所需的卫星轨道参数是通过各种类型的星历提供的,但不论采用哪种类型的星历,所计算出的卫星位置都会与其真实位置有所差异,这就是所谓的星历误差。
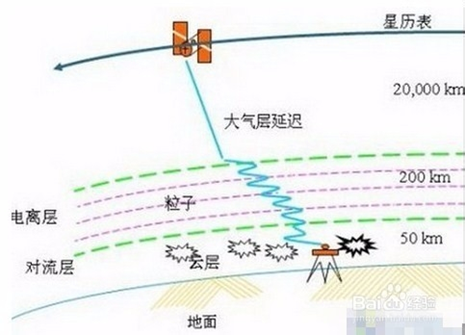
3、大气层引入的误差
特指电离层和对流层对GPS信号的延迟。电离层延迟是由于地球周围的电离层对电磁波的折射效应,使得GPS信号的传播速度发生变化,这种变化称为电离层延迟。对流层延迟指的是对于地球周围的对流层对电磁波的折射效应,使得GPS信号的传播速度发生变化,这种变化称为对流层延迟。
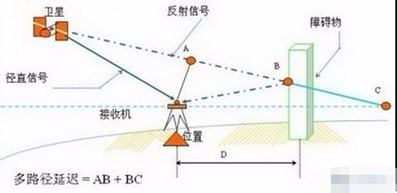
4、多路径效应
多路径效应由于接收终端周围环境的影响,使得接收机所接收到的卫星信号中还包含有反射和折射信号的影响,这就是所谓的多路径效应。例如在高楼林立的楼群中以及山脉密林中,卫星信号收到折射或者反射的几率相当大。这也是为什么建议测试时尽量在空旷地带进行。
5、SA政策
SA政策是美国政府从其国家利益出发,通过降低广播星历精度(ε技术)、在GPS信号中加入高频抖动等方法,人为降低普通用户利用GPS进行导航定位时的精度的一种方法。
6、GPS接收机周围环境因素
包含天气情况,周围其它电磁信号干扰,密集建筑、树林等等。
7、GPS接收机性能因素
包含GPS天线信号接收性能,GPS芯片时钟误差,定位频率,数据处理算法等。
三、GPS漂移的类型
GPS漂移分为静态漂移和动态漂移。
1、静态漂移。当GPS终端静止的时候,其定位坐标在某个范围不停的变化,甚至还会显示出速度,这便是静态漂移。
2、定位点漂移。定位点漂移指亮点之间的漂移距离超过100米或芯片软件设置的门限距离,且无速度数据,过一段时间后又以同样的距离回到原点。这种情况常反应在星历气候,模块干扰,2D定位和3D定位瞬间变化的过程中。此漂移方向没规律性,较难处理。
3、定位精度漂移。常反应在运动过程中,突然在某一点漂移出去,然后又瞬间漂移回来,有时带有速度,有时不带速度数据。多为信号折射干扰引起,突然有一个很强的折射信号参与定位所致。折射信号一丢失,又恢复正常定位精度。
4、叠加漂移。多反应在2D定位时,定位点沿着一定的方向连续漂移,每个点之间的距离不大,并带有速度,当漂移到一定距离后,又慢慢的漂移回原点。此漂移一般是由于GSP模块长时间处于弱信号,或设备收到干扰引起。
声明:以上内容和图片均来自参考文献,仅作汇总而已,版权归原文档作者所有。
参考文献:
[1] https://www.cnblogs.com/magicboy110/archive/2010/12/09/1901669.html
[2] https://www.cnblogs.com/cxt-janson/p/9274438.html
[3] https://jingyan.baidu.com/article/636f38bb4baffdd6b846109a.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)