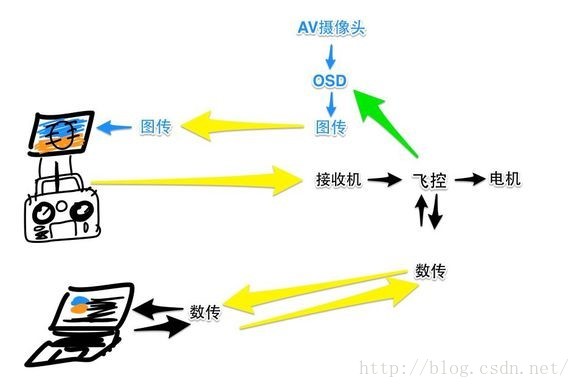
“云中谁寄锦书来,雁字回时,月满西楼”。当无人机在空中飞翔时,从APM飞控到飞手之间有几条看不见的“风筝线”——(1)2.4GHz的遥控;(2)433/915MHz的数传;(3)5.8GHz的图传;(4)osd(on-screen display)。其中遥控是大家最为熟知的,用于控制飞行和切换模式。数传说白了是一个披着射频的皮的无线串口,波特率57600,连接地面站可实时观测飞行数据和在线调参。图传是FPV(First Person View)必备,传输视频信号用于航拍。osd是锦上添花的部件,将飞行数据叠加到视频信号上一起传回地面接收机。
遥控、图传和osd都是很成熟的产品,对于开源用户来说定制性不强,而数传可以传回用户感兴趣的任何数据以及在线调参,实为居家必备之良品。如果选购与APM适配的3DR数传,无需任何修改,插上APM即可在地面站(Mission Planner)监测无人机的飞行数据。从功能上看,数传与下载程序兼具串口功能的USB线别无二致,只是形态上有线无线而已。二者的技术基础是串口以及基于串口的Mavlink通信,本文主要讨论如何使用APM中的串口并进行二次开发。
APM2.8串口概述
串口的英文名是UART,全称Universal Asynchronous Receiver/Transmitter,即通用异步接收/发送机,只要一对传输线(RX-TX)即可实现双向通信。串口通过USB转TTL模块可插在电脑的USB口,在设备管理器上体现为COM口,是单片机调试和通信的重要接口。
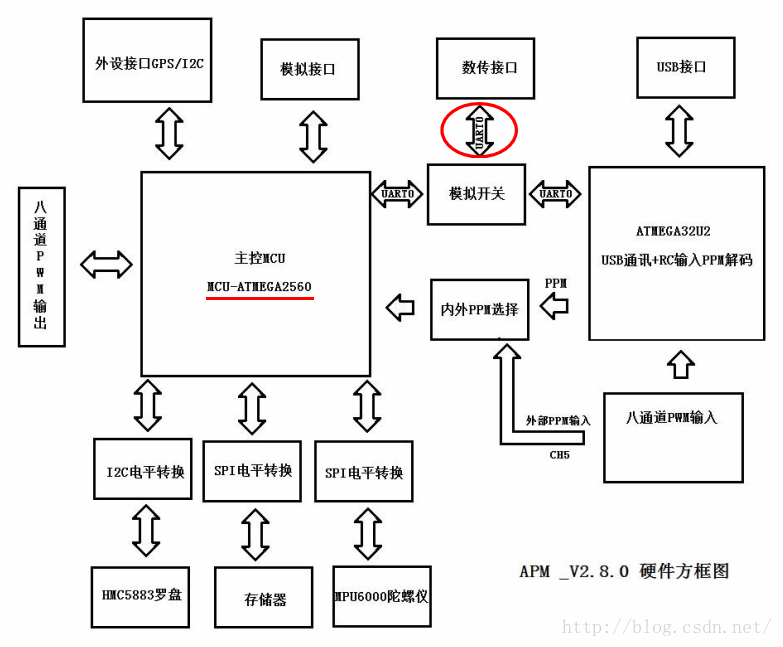
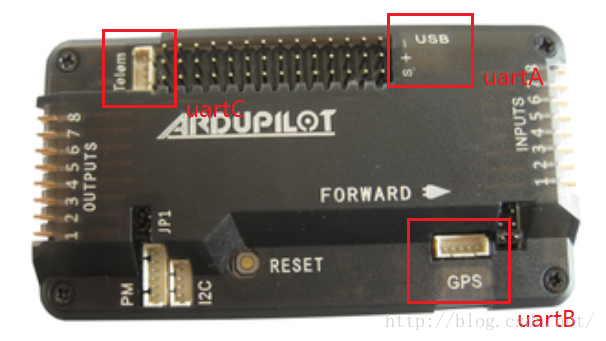
对于APM2.8飞控,其主控芯片为Atmega2560,有4个串口,分别为UART0~UART3,在APM中起作用的只是前3个,即UART0、UART1和UART2。UART0接USB,UART1接GPS,UART2接数传。
APM3.2.1源码为适应除APM之外的不同硬件(如PIXHAWK),在硬件抽象层HAL(Hardware Abstraction Layer)提供了通用的外设接口。在HAL.h中可以查看HAL类的声明,串口方面保留了_uartA~_uartE共5个。
class AP_HAL::HAL {
public:
HAL(AP_HAL::UARTDriver* _uartA, // console
AP_HAL::UARTDriver* _uartB, // 1st GPS
AP_HAL::UARTDriver* _uartC, // telem1
AP_HAL::UARTDriver* _uartD, // telem2
AP_HAL::UARTDriver* _uartE, // 2nd GPS
AP_HAL::I2CDriver* _i2c,
AP_HAL::SPIDeviceManager* _spi,
AP_HAL::AnalogIn* _analogin,
AP_HAL::Storage* _storage,
AP_HAL::UARTDriver* _console,
AP_HAL::GPIO* _gpio,
AP_HAL::RCInput* _rcin,
AP_HAL::RCOutput* _rcout,
AP_HAL::Scheduler* _scheduler,
AP_HAL::Util* _util)
:
uartA(_uartA),
uartB(_uartB),
uartC(_uartC),
uartD(_uartD),
uartE(_uartE),
i2c(_i2c),
spi(_spi),
analogin(_analogin),
storage(_storage),
console(_console),
gpio(_gpio),
rcin(_rcin),
rcout(_rcout),
scheduler(_scheduler),
util(_util)
{}
virtual void init(int argc, char * const argv[]) const = 0;
AP_HAL::UARTDriver* uartA;
AP_HAL::UARTDriver* uartB;
AP_HAL::UARTDriver* uartC;
AP_HAL::UARTDriver* uartD;
AP_HAL::UARTDriver* uartE;
AP_HAL::I2CDriver* i2c;
AP_HAL::SPIDeviceManager* spi;
AP_HAL::AnalogIn* analogin;
AP_HAL::Storage* storage;
AP_HAL::UARTDriver* console;
AP_HAL::GPIO* gpio;
AP_HAL::RCInput* rcin;
AP_HAL::RCOutput* rcout;
AP_HAL::Scheduler* scheduler;
AP_HAL::Util* util;
};
落实到APM2.8飞控板上,从HAL_AVR_APM2_Class.cpp中可以查看串口的对应关系,同样可以得出只用了前3个,且UART0接USB,UART1接GPS,UART2接数传。源码与飞控板,一个底层,一个上层,“默契”地达成了一致。
HAL_AVR_APM2::HAL_AVR_APM2() :
AP_HAL::HAL(
&avrUart0Driver, /* phys UART0 -> uartA */
&avrUart1Driver, /* phys UART1 -> uartB */
&avrUart2Driver, /* phys UART2 -> uartC */
NULL, /* no uartD */
NULL, /* no uartE */
&avrI2CDriver,
&apm2SPIDriver,
&avrAnalogIn,
&avrEEPROMStorage,
&avrUart0Driver,
&avrGPIO,
&apm2RCInput,
&apm2RCOutput,
&avrScheduler,
&avrUtil )
{}
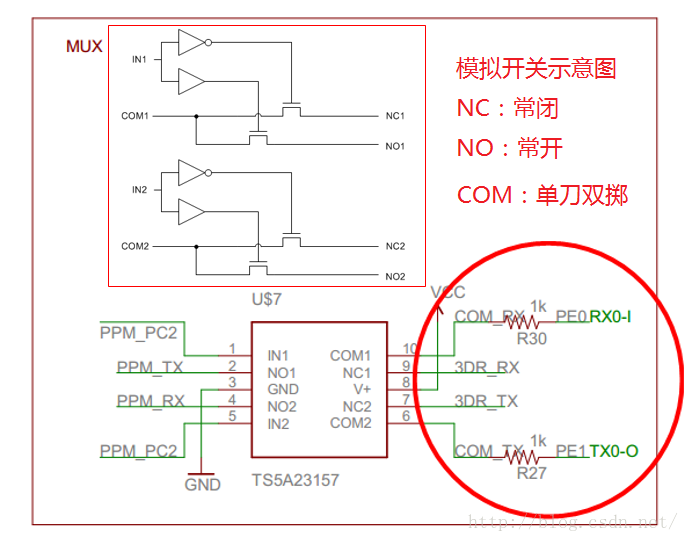
如果大家仔细观察上面APM2.8的方框图,可以发现数传和USB接口都是走的UART0,这是为何?因为APM2.8采用了一种MUX复用的方式,使得当数传与USB同时接上的时候,USB会把数传屏蔽,即UART0占主导地位。在此祭出硬件原理图,TS5A23157是一个模拟开关,3DR代表数传。当USB和数传同时接上时,模拟开关会将3DR_RX与RX0接上,3DR_TX与TX0接上,即串口0把数传给屏蔽了。
串口源码分析
一个串口要发挥作用,首先需要初始化,即配置波特率、设置起始位等操作。对于STM32单片机(用于PIXHAWK),还有串口中断等配置。APM中的Arduino单片机比较简单,只需配置好波特率,其余保持默认即可。
Arduino程序的初始化,一般在setup()函数中。不出所料,串口的初始化也在其中,见ArduCopter.pde的setup()函数,可以看到初始化函数init_ardupilot()。
void setup()
{
cliSerial = hal.console;
// Load the default values of variables listed in var_info[]s
AP_Param::setup_sketch_defaults();
// setup storage layout for copter
StorageManager::set_layout_copter();
init_ardupilot();
// initialise the main loop scheduler
scheduler.init(&scheduler_tasks[0], sizeof(scheduler_tasks)/sizeof(scheduler_tasks[0]));
}
在Visual Studio+VMICRO的环境下,按F12或鼠标右键可转到init_ardupilot()的定义,在system.pde的init_ardupilot()中摘出与uartA有关的代码以便分析。
hal.uartA->begin(map_baudrate(g.serial0_baud), 512, 128);,
//gcs[0].init(hal.uartA);
hal.uartA->set_blocking_writes(false);
第1行和第3行很好理解,分别是uartA设置波特率(115200)和非阻塞模式,第2行的gcs[0]容易让人迷惑。gcs的全称为Ground Control Station,即地面工作站。再转到gcs的定义,可发现其数据类型为GCS_MAVLINK,由此可断定该行代码的作用是绑定Mavlink和uartA,将数据以Mavlink协议与地面站通信。为单独测试串口收发,可取消uartA与Mavlink的绑定,即注释掉gcs所在行的代码。
串口数据收发
初始化搞定之后,就可以进行简单的串口收发测试——串口助手发数据给飞控,飞控返回原数据。串口的接收一般有2种方式:查询或中断。Arduino中的串口中断函数为SerialEvent,是一种软中断,博主将Arduino nano板中测试通过的串口中断代码移植到APM源码中,发现并不起作用。原因尚不明确,或许 APM板本身并不支持,也可能是博主移植的地方不合适。期待有心人进行尝试,欢迎留言讨论。
为了推进测试进程,转向查询方式。有2种方式:1.在ArduCopter.pde的fast_loop中查询;2.在UserCode.pde中添加代码。如果要使用UserCode.pde,需在ArduCopter.pde添加相应的宏,才能将UserCode.pde加入编译。为了方便,博主在fast_loop()中添加串口接收查询代码:
static void fast_loop()
{
// IMU DCM Algorithm
// --------------------
read_AHRS();
// run low level rate controllers that only require IMU data
attitude_control.rate_controller_run();
#if FRAME_CONFIG == HELI_FRAME
update_heli_control_dynamics();
#endif //HELI_FRAME
// write out the servo PWM values
// ------------------------------
set_servos_4();
// Inertial Nav
// --------------------
read_inertia();
// 串口接收查询 by--岳小飞
while (hal.uartA->available())
{
uint8_t data = (uint8_t)hal.uartA->read();
hal.uartA->write(data);
}
// run the attitude controllers
update_flight_mode();
// optical flow
// --------------------
#if OPTFLOW == ENABLED
if(g.optflow_enabled) {
update_optical_flow();
}
#endif // OPTFLOW == ENABLED
}
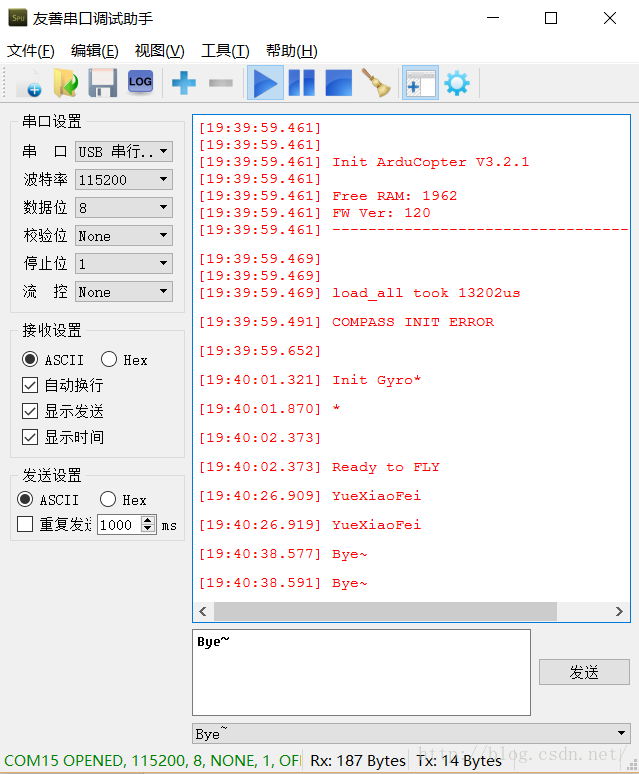
打开串口,APM飞控会发出一串提示字符,包括版本信息,如“Init ArduCopter V3.2.1”。博主发送“YueXiaoFei”,飞控原样返回,测试通过。基于这个简单的收发测试,大家可自定义数据协议,发送和接收感兴趣的飞行数据,也可学习基于串口的Mavlink协议。
PS:无人机系列的第5篇至此结束,系列博客也随之告一段落。就应用方面而言,从入门到编译,从编译到调试,博主尽可能地将问题讲清楚,所有资料免积分下载,也算是为开源贡献自己的一份力吧。博客中可能存在一些小错误,也欢迎大家在评论区批评指正。力有不逮,敬请见谅~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)