目录
- 内容介绍
- 前言
- 生成要移植到stm32的自定义消息和服务
- 生成针对stm32的移植库包roslibs
- 在Mdk中实现C和C++代码混合编译
- 修改mdk配置
- 修改stm32 ROS通讯接口驱动
- 测试
- 补充说明
内容介绍
本文介绍如何将stm32控制板作为一个单独的ROS节点接入整个机器人ROS系统。
前言
在一个完整的机器人硬件系统中,由于众多传感器接口和实时性的需求,不可避免的需要加入嵌入式控制器,现在的机器人大多使用了分布式ROS系统,这套系统主要基于linux运行,而以stm32为例的大多数嵌入式控制器不支持linux。于是,当工控机想要与stm32进行数据交换时,只能脱离ROS体系采用自定义通讯协议。
那么,能不能在STM32中使用ROS架构呢,答案是肯定的,通过rosserial模块,我们可以把一部分ROS的接口定义移植到STM32中编译,虽然不能实现完整的ROS移植,但是可以把整个STM32控制器作为一个单独的ROS节点加入到ROS系统中,实现消息定义与收发、服务创建等功能。本文接下来将介绍该实现方法。
生成要移植到stm32的自定义消息和服务
在ros工作空间catkin_ws中,我们可以创建自己的包,并在msg和srv目录中加入自己定义的消息和服务,这些消息和服务是STM32与工控机通讯时需要用到的,这样接下来生成roslibs时,就会自动包含这些自定义消息和服务。
生成针对stm32的移植库包roslibs
- 下载rosserial_stm32包:进入自己的ROS工作空间src目录,如~/catkin_ws/src,输入
git clone https://github.com/yoneken/rosserial_stm32.git
- 编译rosserial_stm32:在~/catkin_ws/目录下输入
catkin_make编译新加入的包,之后记得输入source ~/.bashrc使得编译内容生效
cd ~/catkin_ws
catkin_make
source ~/.bashrc
- 生成待移植的头文件:
在工作目录下新建一个文件夹,例如stm32_roslib,然后进入stm32_roslib新建一个Inc文件夹,首字母I要大写。在stm32_roslib目录(不是Inc目录)下执行命令:
cd ~
mkdir -p stm32_roslib/Inc
cd stm32_roslib
rosrun rosserial_stm32 make_libraries.py ./
这将在stm32_roslib/Inc目录下生成一堆文件夹,包含ROS自带的消息和服务,以及catkin_ws下所有包内自定义的消息和服务,均以C++头文件的方式定义,此外,还生成了ros.h、STM32Hardware.h、duration.cpp、time.cpp四个文件。这就是我们需要移植到stm32的项目中混合编译的内容。
注意,这里有两点需要说明:
- 根据ros版本的不同,在执行make_libraries.py时可能报错
SyntaxError: Missing parentheses in call to 'print'. Did you mean print(__usage__)?,这是由于脚本在python3执行,但是python3的语法下print需要加(),我们需要修改rosserial_stm32包下面的make_libraries.py文件
cd ~/catkin_ws/src/rosserial_stm32/src/rosserial_stm32
vim make_libraries.py
第74行和第81行有两个print,把后面的内容加上括号即可。
if (len(sys.argv) < 2):
print (__usage__)
exit()
path = sys.argv[1]
if path[-1] == "/":
path = path[0:-1]
print ("\nExporting to %s" % path)
- Inc下包含的目录很多,但是不一定所有的消息和服务我们在stm32都要用到,可以视情况删除一部分,减少stm32项目体量。
在Mdk中实现C和C++代码混合编译
将上一步生成的Inc文件夹整个拷贝出来,进入windows系统,将Inc文件夹复制到stm32的Mdk项目下面,例如,我们放置在stm32_ros_lib/Inc下。接下来,打开mdk,进入stm32的项目,由于我们生成的Inc下所有的头文件都是C++编写的,所以我们要开启Mdk的c++编译。
一定要注意,这里网上很多文章说应该添加–cpp修改mdk的编译配置,据我测试这么做限制很大,因为这样会让mdk对项目所有文件均采用c++编译器编译,如果你的项目添加了第三方模组,如freertos、虚拟串口VCP等,这些c文件都会编译报错。
兼容性最好的方法应该是采用mdk的c/c++混合编译模式,因为默认情况下,mdk会通过文件扩展名来选择对应的编译器,.c文件会用c编译器,.cpp文件会采用c++编译器,所以我们应该利用cpp文件,将所有与ROS有关的内容都写到单独的cpp文件(如rosserial_lib.cpp)里,然后在头文件rosserial_lib.h中将cpp的函数声明用extern C包装一下,其它c文件中即可使用#include rosserial_lib.h来包含cpp文件的内容了,至于cpp中调用其它c文件内容,本来就是向下兼容的,所以无需烦恼。
具体来说,我们综合freertos的任务架构以及ROS节点的while循环写法,将ROS移植相关内容都放在同一个freertos任务中。
首先是rosserial_lib.h文件:
#ifndef ROSSERIAL__H_
#define ROSSERIAL__H_
#ifdef __cplusplus
extern "C" {
#endif
void RosserialSetup(void);
void RosserialLoop(void);
#ifdef __cplusplus
}
#endif
#endif
这里我们定义了两个函数,分别是节点初始化函数RosserialSetup(void)和节点循环函数RosserialLoop(void)
其次是freertos的任务,我们创建了一个ControlTask的任务,在进入无限循环前先执行节点初始化函数RosserialSetup(void),然后再无限循环中执行RosserialLoop(),注意到这里是通过#include "rosserial_lib.h",来调用C++函数RosserialSetup(void)和RosserialLoop(void),由于在头文件中加入了extern "C",这种调用编译器是不会报错的。
#include "rosserial_lib.h"
void ControlTask(void *argument) {
osDelay(500);
RosserialSetup();
osDelay(500);
for(;;) {
RosserialLoop();
}
}
接下来,我们介绍和分析rosserial_lib.cpp里面两个函数的具体实现。如下代码所示,这是一段stm32中ROS节点的具体实现示例,ros.h是ros功能的核心头文件,std_msgs/String.h是ros自带的标准消息头文件,ts_vision_ctrl/final_data.h是用户自定义消息头文件,这些都包含在之前生成的Inc文件夹内。
基本写法和标准ROS节点类似,只是语法有些微区别,同样是定义nodehandle类、消息收发类型、接收消息回调函数,在 RosserialSetup(void)函数中进行节点初始化,注册需要收发的消息和服务,在RosserialLoop(void)函数中进行节点消息的更新发送,编写相关控制代码,最后执行nh.spinOnce()来响应各种回调函数(这里不能用spin(),否则任务循环会被阻塞)。注意由于RosserialLoop()函数本身在freertos的任务无限循环中执行,所以RosserialLoop()函数内部不再需要while循环。
#include "rosserial_lib.h"
#include "cmsis_os.h"
#include <ros.h>
#include <std_msgs/String.h>
#include <ts_vision_ctrl/final_data.h>
void command_callback(const std_msgs::String &rxbuff);
ros::NodeHandle nh;
std_msgs::String stm32_to_pc_word;
ts_vision_ctrl::final_data my_data;
ros::Subscriber<std_msgs::String> cmd_sub("pc_to_stm32", command_callback);
ros::Publisher publisher("stm32_to_pc", &stm32_to_pc_word);
ros::Publisher my_pub("stm32_my_data", &my_data);
void command_callback(const std_msgs::String &rxbuff) {
stm32_to_pc_word = rxbuff;
publisher.publish(&stm32_to_pc_word);
}
void RosserialSetup(void) {
nh.initNode();
nh.advertise(publisher);
nh.advertise(my_pub);
nh.subscribe(cmd_sub);
my_data.heading = 3.5;
my_data.x = 1.23;
my_data.y = 2.56;
my_data.header.frame_id = "position";
my_data.header.seq = 0;
}
void RosserialLoop(void) {
static int i = 0;
my_data.header.seq = i;
i++;
my_pub.publish(&my_data);
nh.spinOnce();
osDelay(20);
}
修改mdk配置
在Mdk宏定义中加入,__USE_C99_MATH,这样可以避免roslib编译错误
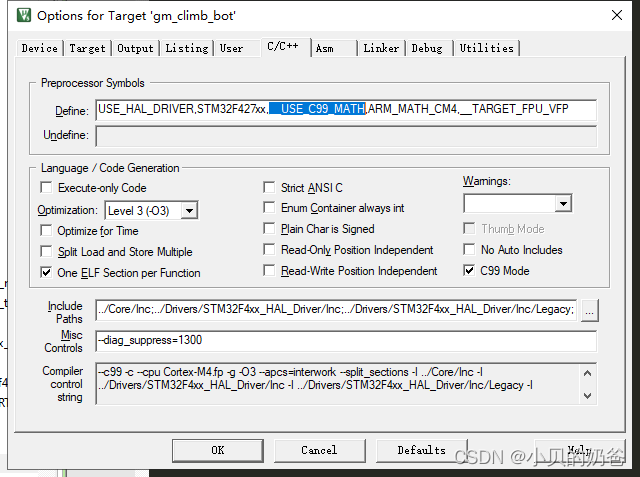
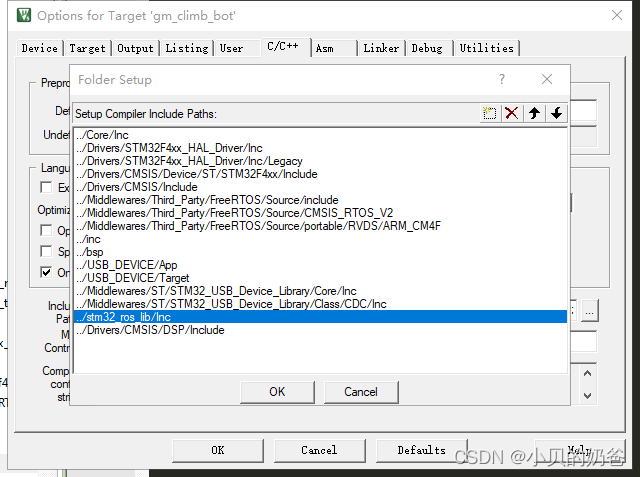
在include paths中加入…/stm32_ros_lib/Inc目录
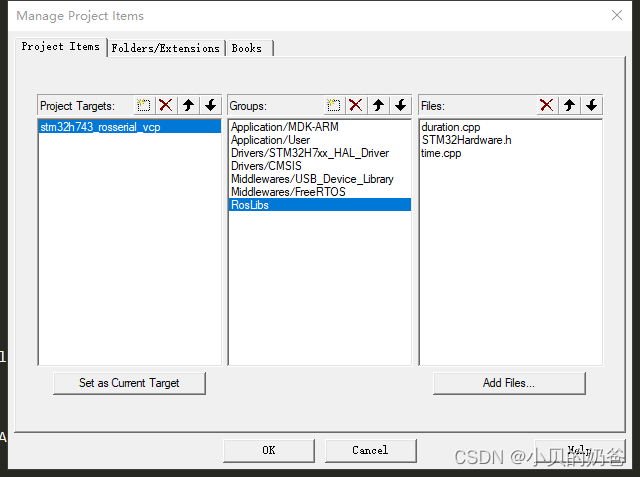
在左边project项目名称右键,选择Manage Project Items,在Groups新建一个组别,如RosLibs,添加早先用make_libraries.py生成Inc文件夹下的四个文件:ros.h、STM32Hardware.h、duration.cpp、time.cpp。其实两个头文件加不加都可以,我们只需要修改STM32Hardware.h的内容完成移植。
修改stm32 ROS通讯接口驱动
打开STM32Hardware.h文件,STM32Hardware.h中的类STM32Hardware会在node_handle.h中调用
需要在这个类中实现read()和write()的公共方法。这里就和stm32的硬件接口相关了,由于我们用的是rosserial,所以这里将会调用stm32的串口驱动与工控机进行通讯。
class STM32Hardware {
protected:
public:
STM32Hardware() {}
void init() {}
int read() {
if (Uart_Available()) {
return Uart_Read();
} else {
return -1;
}
}
void flush(void) {}
void write(uint8_t *data, int length) { Uart_Write(data, length); }
unsigned long time() { return HAL_GetTick(); }
protected:
};
我们需要实现三个函数,分别是int read()、 void write(uint8_t *data, int length)以及unsigned long time()。其中read函数返回值是一个整型,其实是每次读取并返回一个字节,write函数每次则是发送长度为length的字节数组。为此,最好为串口配置一个接收环形缓冲区,每次串口接收到数据,就写入环形缓冲区。read()函数首先调用Uart_Available()函数,判断环形缓冲区是否有数据,如果有,就通过Uart_Read()函数从环形缓冲区读取一个字节并返回这个字节。
下面的代码是最简单的环形缓冲区实现,仅供参考,实际应用时,应考虑多任务对全局变量操作时可能产生的竞争冒险现象,添加信号量等同步机制。至于串口数据接收写入环形缓冲区,是在串口中断里面实现的。
int Uart_Available(void) {
return ((uint32_t)(UART_RX_DATA_SIZE + uart_rxBufPtrIn - uart_rxBufPtrOut)) %
UART_RX_DATA_SIZE;
}
int Uart_Read(void) {
if (uart_rxBufPtrIn == uart_rxBufPtrOut) {
return -1;
} else {
unsigned char ch = uart_rxBuffer[uart_rxBufPtrOut];
uart_rxBufPtrOut = (uint16_t)(uart_rxBufPtrOut + 1) % UART_RX_DATA_SIZE;
return ch;
}
}
void Uart_Write(uint8_t *Buf, uint16_t Len) {
while (UART2_Transmit(Buf, Len) != HAL_OK) {
osDelay(1);
}
}
最后是time()函数,需要提供一个毫秒计数的系统时间,一般我们的freertos系统节拍都是1ms,因此直接返回HAL_GetTick()即可 ,这个函数返回的是32位的毫秒计数,超时时间很长,不用担心溢出问题。
测试
至此,stm32全部的ROS移植就完成了,将stm32项目编译后下载,然后将其对应的串口接入工控机,在工控机中执行
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 _baud:=115200
注意上述ttyUSB0 要改成实际识别的串口名,波特率也要和stm32中设置的波特率匹配。如果一切正常,可以看到输出信息
[INFO] [1661936312.766461]: ROS Serial Python Node
[INFO] [1661936312.784234]: Connecting to /dev/ttyUSB0 at 115200 baud
[INFO] [1661936314.895818]: Requesting topics...
[INFO] [1661936314.915546]: Note: publish buffer size is 1024 bytes
[INFO] [1661936315.080871]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1661936315.179145]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1661936316.061922]: Setup publisher on /tf [tf/tfMessage]
[INFO] [1661936316.073155]: Note: subscribe buffer size is 1024 bytes
[INFO] [1661936316.077387]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
...
...
此时,整个stm32嵌入式系统已经作为一个ROS节点运行在ROS系统内了,之后新打开一个终端,执行rostopic list,可以看到相关的收发消息
gm@controlboard:~$ rostopic list
/cmd_vel
/diagnostics
/imu
/odom
/rosout
/rosout_agg
/tf
补充说明
以上内容是基于stm32的标准串口实现,但是实际使用时,由于ROS数据传输量较大,标准串口的带宽不够用,因此大部分情况下,我们都使用STM32的usb虚拟串口VCP来取代标准串口,VCP带宽就完全能够满足ROS的常用需求了,下一篇文章,我们将详细介绍如何结合虚拟串口来实现Rosserial功能。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)