apm、pixhawk、pixhack飞控pos数据提取流程
下载日志


打开log分析
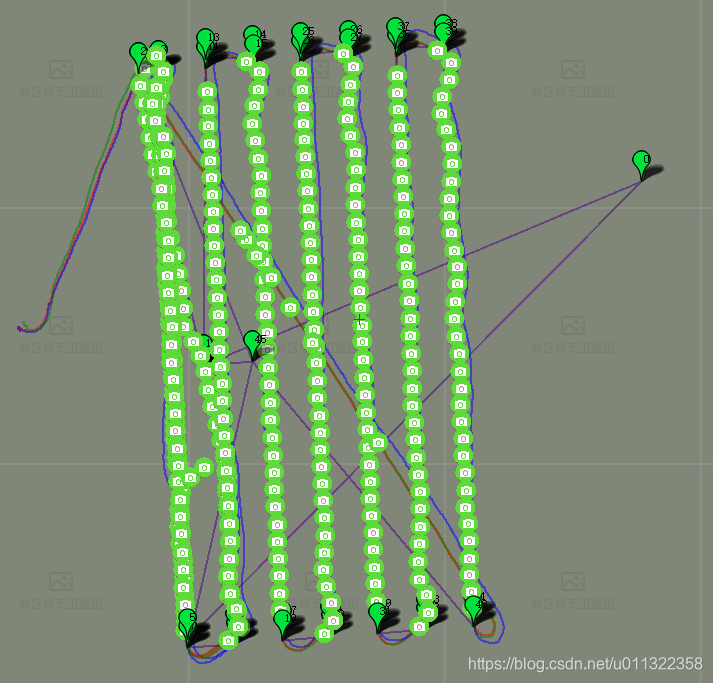
区域omap地图验证
验证之前将log文件使用mission planner进行kml验证
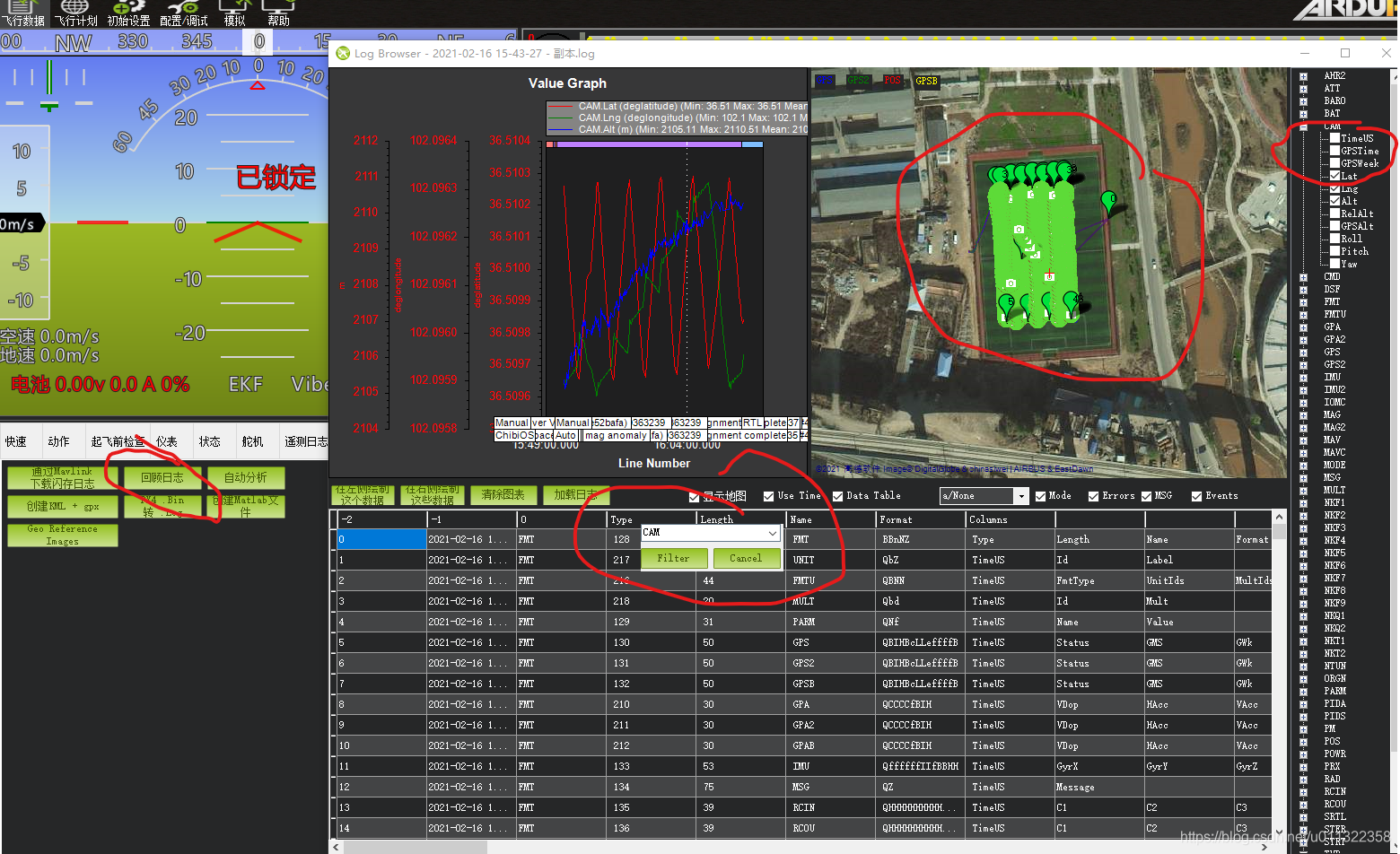
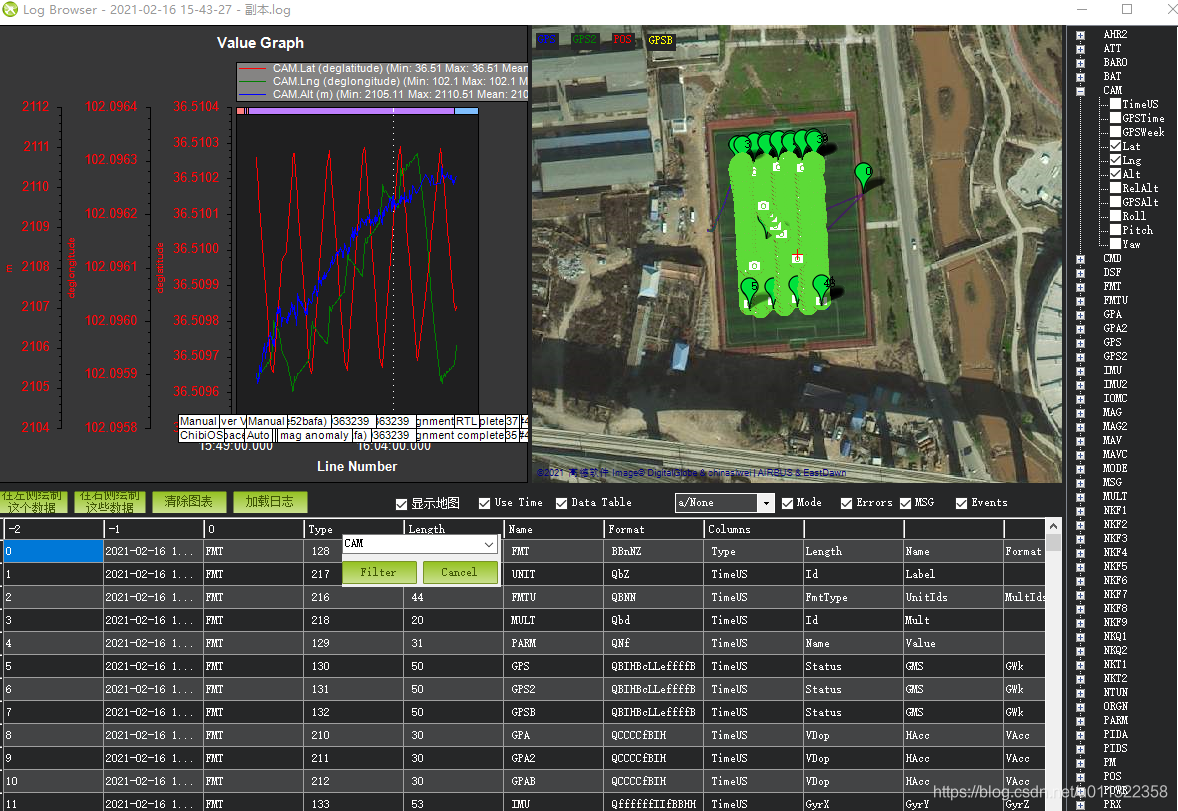
筛选相机pos坐标
***********(选择CAM)************很重要,非常重要
CAM数据里就包含需要的pos坐标
导出pos坐标
任意位置右键鼠标,选择export visible,给定位置导出pos位置
导出的pos坐标数据
俺需要进行筛选,六个外方位线元素都有。
pos数据检验
将pos数据转换成kml文件,导入到google earth或omap进行验证。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)