一、主题:Fast planner 基本原理学习
二、目标:
- 理解Fast planner轨迹规划处理流程
- 理解hybrid A*的改进点
- B样条曲线定义、性质、以及所带来的便利
三、正文:
1、Fast planner轨迹规划处理流程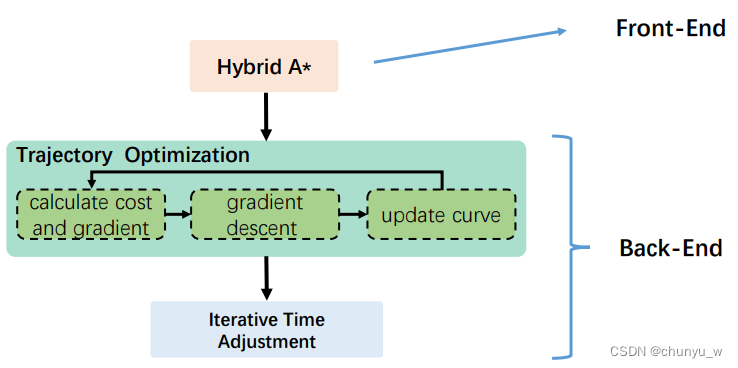
主要思想:前端考虑动力学进行规划,后端轨迹优化利用B样条曲线的性质。
- 前端考虑动力学的作用:1、为了后端优化能得到效果更好的轨迹。2、利用Forward direction:discrete (sample) in control space可以很好的几何到A*算法中。
- 后端采用B样条曲线作轨迹规划,在位置上,可以利用几个控制点描述一条曲线,利用B样条曲线的性质,可以将对轨迹的约束、动力学的约束加在控制点上,从而简化了计算。处理顺序是:1、先通过esdf地图提供梯度场信息,设计惩罚函数,使轨迹向障碍物少的地方移动。然后轨迹几何位置不变。在进行时间重分配,使轨迹符合动力学约束(最大速度、最大加速度在允许范围内。)
- 备注:运动规划的轨迹是一条带时间参数的轨迹,同时需要符合避障、动力学的约束。一般工程上前端用来完成满足避障的几何路线。动力学的优化一般放在后端。
优点:
1、使轨迹向梯度场小的方向移动,设计出来的轨迹在障碍物中间,相较其他方法会更加安全。
2、利用了B样条曲线,带来了很大的便利,因为B样条曲线具有以下性质:
-
改变任意控制点,只改变有限时间段的轨迹。
-
B样条曲线的导数仍为B曲线。
缺点:
2、前端处理流程
3、B样条曲线
贝塞尔曲线(Bezier Curve)
- 定义
B
(
t
)
=
∑
i
=
0
n
−
1
R
i
,
n
(
t
)
P
i
R
i
,
n
(
t
)
=
C
n
i
t
i
(
1
−
t
)
n
−
i
t
∈
[
0
,
1
]
\boldsymbol{B}(t)=\sum_{i=0}^{n-1} R_{i, n}(t) \boldsymbol{P}_{i} \quad R_{i, n}(t)=C_{n}^{i} t^{i}(1-t)^{n-i} t \in[0,1]
B(t)=i=0∑n−1Ri,n(t)PiRi,n(t)=Cniti(1−t)n−it∈[0,1] - 性质
- 曲线的阶数随着控制点的增加而增加。
- 改变任意一点会影响到整段轨迹。
B样条曲线(B-Spline)
-
定义
C
(
t
)
=
∑
i
=
0
n
N
i
,
p
(
t
)
Q
i
\mathbf{C}(t)=\sum_{i=0}^{n} N_{i, p}(t) \mathbf{Q}_{i}
C(t)=i=0∑nNi,p(t)Qi
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3DrQwf6o-1654346880211)(https://note.youdao.com/yws/res/9115/WEBRESOURCEb4bce5177d243739e738735aa7493741)]](https://img-blog.csdnimg.cn/644df1ed830646039ef188b48eda6d8e.png)
-
性质
- 更改控制点(control point)只能影响有限的时间,如图,如果
Q
3
Q_{3}
Q3 的点发生移动。只有在时间段u1~u5内,
N
1
,
3
N_{1,3}
N1,3不为0。所以改变Q3的位置影响的时间段是有限的。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ieOUPM9O-1654346880212)(https://note.youdao.com/yws/res/9022/WEBRESOURCE66f35e9767e8147370c1de50d0b69df1)]](https://img-blog.csdnimg.cn/fbb3fa8c41a041f7883aa74fd5a079ec.png)
时间范围为什么两边缩小Pb的偏移,由下图可以很容易看出来。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Z1sfvvWd-1654346880212)(https://note.youdao.com/yws/res/9031/WEBRESOURCE607aca02d779f56235890a3769d23752)]](https://img-blog.csdnimg.cn/740a48144b12410e85c7df92662d2b20.png)
-
一个时间段的轨迹由有限的点决定
如图,
[
u
3
,
u
4
)
[u_{3},u_{4})
[u3,u4)的时间段只受到
Q
0
、
Q
1
、
Q
2
、
Q
3
Q_{0}、Q_{1}、Q_{2}、Q_{3}
Q0、Q1、Q2、Q3控制点的作用。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9QxElULu-1654346880213)(https://note.youdao.com/yws/res/9031/WEBRESOURCE607aca02d779f56235890a3769d23752)]](https://img-blog.csdnimg.cn/09c890423a454785a0ae5b2dc2982495.png)
-
p>=1具有轨迹连续性质
推到出C(t)的表达式易证。
-
B样条的导数还是B样条
- 1阶导
C
(
˙
u
)
=
∑
i
=
0
n
−
1
N
i
+
1
,
p
−
1
(
u
)
V
i
\mathbf {C} \dot(u)=\sum_{i=0}^{n-1} N_{i+1, p-1}(u) \mathbf{V}_{i}
C(˙u)=i=0∑n−1Ni+1,p−1(u)Vi - 2阶导
C
(
¨
u
)
=
∑
i
=
0
n
−
2
N
i
+
2
,
p
−
2
(
u
)
A
i
\mathbf{C} \ddot(u)=\sum_{i=0}^{n-2} N_{i+2, p-2}(u) \mathbf{A}_{i}
C(¨u)=i=0∑n−2Ni+2,p−2(u)Ai - 控制点的计算
V
i
=
p
(
Q
i
+
1
−
Q
i
)
u
i
+
p
+
1
−
u
i
+
1
\mathbf{V}_{i}=\frac{p\left(\mathbf{Q}_{i+1}-\mathbf{Q}_{i}\right)}{u_{i+p+1}-u_{i+1}}
Vi=ui+p+1−ui+1p(Qi+1−Qi)
A
i
=
(
p
−
1
)
(
V
i
+
1
−
V
i
)
u
i
+
p
+
1
−
u
i
+
2
\mathbf{A}_{i}=\frac{(p-1)\left(\mathbf{V}_{i+1}-\mathbf{V}_{i}\right)}{u_{i+p+1}-u_{i+2}}
Ai=ui+p+1−ui+2(p−1)(Vi+1−Vi) - 通过对高阶的轨迹表达式求导,可得到物理含义的速度、加速度等信息,且可是B样条曲线,方便利用B样条曲线的凸包性质。
-
凸包性质(Convex Hull Property)
- 直观上看,如下图,最左边的橙色时间段段为控制点
$Q_{0}、Q_{1}、Q_{2}、Q_{3}$控制,可见这段轨迹是在控制点的连线区域内的。时间段以此类推,都在其对应控制点连线的多边行区域内。因此容易将轨迹的障碍物的距离约束,速度、加速度约束,转化到对控制点的约束,从而简化计算。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-DCsNMUGU-1654346880214)(https://note.youdao.com/yws/res/9092/WEBRESOURCE24533b9b9a853cecbff80fb98b729f05)]](https://img-blog.csdnimg.cn/f37bf75854bb47c19dc37fcf9b61d543.png)
-
时间均匀的B样条可以化成特殊的表达形式(Fast Planner中使用
通式:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2ILWokeD-1654346880215)(https://note.youdao.com/yws/res/9133/WEBRESOURCE98c3430718259f8f1ef7755fb0b3f92a)]](https://img-blog.csdnimg.cn/00d9d2b3a08f4b1090bc3ab7ba33d310.png)
当p = 3, m = 3:
p
(
s
(
u
)
)
=
s
(
u
)
T
M
4
q
3
s
(
u
)
=
[
1
s
(
u
)
s
2
(
u
)
s
3
(
u
)
]
T
q
3
=
[
Q
0
Q
1
Q
2
Q
3
]
T
s
(
u
)
=
(
u
−
u
3
)
/
Δ
u
\begin{aligned} \mathbf{p}(s(u)) &=\mathbf{s}(u)^{\mathrm{T}} \mathbf{M}_{4} \mathbf{q}_{3} \\ \mathbf{s}(u) &=\left[\begin{array}{llll} 1 & s(u) & s^{2}(u) & s^{3}(u) \end{array}\right]^{\mathrm{T}} \\ \mathbf{q}_{3} &=\left[\begin{array}{llll} \mathbf{Q}_{0} & \mathbf{Q}_{1} & \mathbf{Q}_{2} & \mathbf{Q}_{3} \end{array}\right]^{\mathrm{T}} \\ s(u) &=\left(u-u_{3}\right) / \Delta u \end{aligned}
p(s(u))s(u)q3s(u)=s(u)TM4q3=[1s(u)s2(u)s3(u)]T=[Q0Q1Q2Q3]T=(u−u3)/Δu
推导:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-75fmrpar-1654346880215)(https://note.youdao.com/yws/res/9137/WEBRESOURCE78be1357248d75e6332e2d6d0b1ace82)]](https://img-blog.csdnimg.cn/6b4f34d4069a4624a86bea4b0378810b.png)
N
0
,
3
(
t
)
=
1
6
{
t
3
t
∈
[
0
,
1
)
t
2
(
2
−
t
)
+
t
(
3
−
t
)
(
t
−
1
)
+
(
4
−
t
)
(
t
−
1
)
2
t
∈
[
1
,
2
)
t
(
3
−
t
)
2
+
(
t
−
1
)
(
3
−
t
)
(
4
−
t
)
+
(
4
−
t
)
2
(
t
−
2
)
t
∈
[
2
,
3
)
(
4
−
t
)
3
t
∈
[
3
,
4
)
N_{0,3}(t)=\frac{1}{6}\left\{\begin{array}{cl} t^{3} & t \in[0,1) \\ t^{2}(2-t)+t(3-t)(t-1)+(4-t)(t-1)^{2} & t \in[1,2) \\ t(3-t)^{2}+(t-1)(3-t)(4-t)+(4-t)^{2}(t-2) & t \in[2,3) \\ (4-t)^{3} & t \in[3,4) \end{array}\right.
N0,3(t)=61⎩⎪⎪⎨⎪⎪⎧t3t2(2−t)+t(3−t)(t−1)+(4−t)(t−1)2t(3−t)2+(t−1)(3−t)(4−t)+(4−t)2(t−2)(4−t)3t∈[0,1)t∈[1,2)t∈[2,3)t∈[3,4)
N
1
,
3
(
t
)
=
1
6
{
(
t
−
1
)
3
t
∈
[
1
,
2
)
(
t
−
1
)
2
(
1
−
t
)
+
(
t
−
1
)
(
2
−
t
)
(
t
−
2
)
+
(
3
−
t
)
(
t
−
2
)
2
t
∈
[
2
,
3
)
(
t
−
1
)
(
2
−
t
)
2
+
(
t
−
2
)
(
2
−
t
)
(
3
−
t
)
+
(
3
−
t
)
2
(
t
−
3
)
t
∈
[
3
,
4
)
(
3
−
t
)
3
t
∈
[
4
,
5
)
.
.
.
N_{1,3}(t)=\frac{1}{6}\left\{\begin{array}{cl} (t-1)^{3} & t \in[1,2) \\ (t-1)^{2}(1-t)+(t-1)(2-t)(t-2)+(3-t)(t-2)^{2} & t \in[2,3) \\ (t-1)(2-t)^{2}+(t-2)(2-t)(3-t)+(3-t)^{2}(t-3) & t \in[3,4) \\ (3-t)^{3} & t \in[4,5) \end{array}\right. \\...
N1,3(t)=61⎩⎪⎪⎨⎪⎪⎧(t−1)3(t−1)2(1−t)+(t−1)(2−t)(t−2)+(3−t)(t−2)2(t−1)(2−t)2+(t−2)(2−t)(3−t)+(3−t)2(t−3)(3−t)3t∈[1,2)t∈[2,3)t∈[3,4)t∈[4,5)...
可计算
t
∈
[
u
3
,
u
4
)
t \in[u_{3},u_{4})
t∈[u3,u4)段的轨迹:
推广到
t
∈
[
u
m
,
u
m
+
1
)
t \in[u_{m},u_{m+1})
t∈[um,um+1)段的轨迹:
结论:由公式看出,只需要
Q
m
−
3
、
Q
m
−
2
、
Q
m
−
1
、
Q
m
Q_{m-3}、Q_{m-2}、Q_{m-1}、Q_{m}
Qm−3、Qm−2、Qm−1、Qm的点,分配时间
Δ
u
\Delta u
Δu,就可以确定`
t
∈
[
u
m
,
u
m
+
1
)
t \in[u_{m},u_{m+1})
t∈[um,um+1)段轨迹。
p
(
s
(
u
)
)
=
s
(
u
)
T
M
4
q
m
s
(
u
)
=
[
1
s
(
u
)
s
2
(
u
)
s
3
(
u
)
]
T
q
m
=
[
Q
m
−
3
Q
m
−
2
Q
m
−
1
Q
m
]
T
s
(
u
)
=
(
u
−
u
m
)
/
Δ
u
\begin{aligned} \mathbf{p}(s(u)) &=\mathbf{s}(u)^{\mathrm{T}} \mathbf{M}_{4} \mathbf{q}_{m} \\ \mathbf{s}(u) &=\left[\begin{array}{llll} 1 & s(u) & s^{2}(u) & s^{3}(u) \end{array}\right]^{\mathrm{T}} \\ \mathbf{q}_{m} &=\left[\begin{array}{llll} \mathbf{Q}_{m-3} & \mathbf{Q}_{m-2} & \mathbf{Q}_{m-1} & \mathbf{Q}_{\mathrm{m}} \end{array}\right]^{\mathrm{T}} \\ s(u) &=\left(\begin{array}{llll} \left.u-u_{m}\right) / \Delta u \end{array}\right.\\ \end{aligned}
p(s(u))s(u)qms(u)=s(u)TM4qm=[1s(u)s2(u)s3(u)]T=[Qm−3Qm−2Qm−1Qm]T=(u−um)/Δu
M
4
=
1
3
!
[
1
4
0
0
−
3
0
3
0
3
−
6
3
0
−
1
3
−
3
1
]
\mathbf{M}_{4}=\frac{1}{3 !}\left[\begin{array}{cccc} 1 & 4 & 0 & 0 \\ -3 & 0 & 3 & 0 \\ 3 & -6 & 3 & 0 \\ -1 & 3 & -3 & 1 \end{array}\right]
M4=3!1⎣⎢⎢⎡1−33−140−63033−30001⎦⎥⎥⎤
- 理解:B样条曲线是贝塞尔曲线的一种特殊情况,规定了基函数的形式,使B样条有一些新的性质。由三个重要元素组成: degree(阶数)、control points(控制点)、knot vector(时间向量)。
- 基函数计算
N
i
,
0
(
u
)
=
{
1
if
u
i
≤
u
<
u
i
+
1
0
otherwise
N
i
,
p
(
u
)
=
u
−
u
i
u
i
+
p
−
u
i
N
i
,
p
−
1
(
u
)
+
u
i
+
p
+
1
−
u
u
i
+
p
+
1
−
u
i
+
1
N
i
+
1
,
p
−
1
(
u
)
u
代
表
时
间
变
量
\begin{array}{l} N_{i, 0}(u)=\left\{\begin{array}{lc} 1 & \text { if } u_{i} \leq u<u_{i+1} \\ 0 & \text { otherwise } \end{array}\right. \\ N_{i, p}(u)=\frac{u-u_{i}}{u_{i+p}-u_{i}} N_{i, p-1}(u)+\frac{u_{i+p+1}-u}{u_{i+p+1}-u_{i+1}} N_{i+1, p-1}(u) \end{array} u代表时间变量
Ni,0(u)={10 if ui≤u<ui+1 otherwise Ni,p(u)=ui+p−uiu−uiNi,p−1(u)+ui+p+1−ui+1ui+p+1−uNi+1,p−1(u)u代表时间变量
可以看出: 0阶时轨迹就是控制点。1阶时控制点连线的直线。2阶导时控制点有光滑曲线连接(轨迹连续可导)。
- 注意:Faster Planner选用了三阶基函数。通过各阶基函数的计算关系,很好推导B样条曲线的性质。
4、后端处理流程
-
代价函数的设计
- smoothness cost
f
s
f_{s}
fs
f
s
=
∑
i
=
p
b
−
1
N
−
p
b
+
1
∥
(
Q
i
+
1
−
Q
i
)
+
(
Q
i
−
1
−
Q
i
)
∥
2
f_{s}=\sum_{i=p_{b}-1}^{N-p_{b}+1}\left\|\left(\mathbf{Q}_{i+1}-\mathbf{Q}_{i}\right)+\left(\mathbf{Q}_{i-1}-\mathbf{Q}_{i}\right)\right\|^{2}
fs=i=pb−1∑N−pb+1∥(Qi+1−Qi)+(Qi−1−Qi)∥2
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-tdARbn11-1654346880218)(https://note.youdao.com/yws/res/9212/WEBRESOURCE960200fd3e8289c35d25d80b6fc72542)]](https://img-blog.csdnimg.cn/fd82113fea1646d1b8675dab2c79d444.png)
-
dynamic feasibility cost
f
v
+
f
a
f_{v}+f_{a}
fv+fa
设计惩罚函数
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-J8GogIjs-1654346880219)(https://note.youdao.com/yws/res/9220/WEBRESOURCEdbde5f889c636b0305e4fda94fc6efff)]](https://img-blog.csdnimg.cn/5da5e19df63c40488a9d1e05aca95ba0.png)
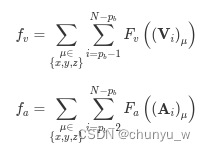
注意:因为是软约束,所以后续需要进行时间调整
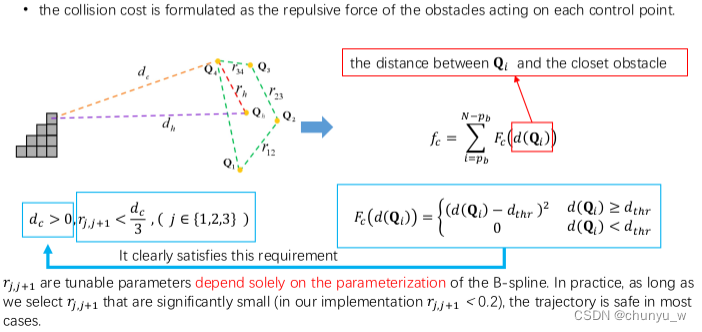
-
collision cos
f
c
f_{c}
fc
f
c
=
∑
i
=
p
b
N
−
p
b
F
c
(
d
(
Q
i
)
)
f_{c}=\sum_{i=p_{b}}^{N-p_{b}} F_{c}\left(d\left(\mathbf{Q}_{i}\right)\right)
fc=i=pb∑N−pbFc(d(Qi))
可见,由B样条曲线的凸包性质,轨迹的约束都可以转化到控制点上,简化了计算。
-
时间调整
参考:
《深蓝学院》移动机器人运动规划第8章
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zTVGjvvA-1654346880216)(https://note.youdao.com/yws/res/8986/WEBRESOURCE770de27d10ca273bfa5aee2d14d71b0b)]](https://img-blog.csdnimg.cn/f08f4b608123451da1d7eff839acb619.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-xl309Lpu-1654346880217)(https://note.youdao.com/yws/res/8999/WEBRESOURCE433151066d5283f20fb94650b21e0e28)]](https://img-blog.csdnimg.cn/4ce7a21ead5042738813d82cb7f24a7b.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gTlpMUaI-1654346880217)(https://note.youdao.com/yws/res/9001/WEBRESOURCE5450b7c8dc1da5438cfba6a9f0202b9e)]](https://img-blog.csdnimg.cn/1a7fd6342cde4df5a05ac97648f0f551.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-yfZSKZS1-1654346880218)(https://note.youdao.com/yws/res/9004/WEBRESOURCEa788c0231d44fd724bcbb4f1a6767d75)]](https://img-blog.csdnimg.cn/78ad55436cb945a79da097fbed61687f.png)