基于apm、pix无人坦克、无人车自动控制与自动驾驶教程
**
目前玩无人机的玩家较多,但是无人车、无人机坦克的玩家少之又少,本人经过一段时间的琢磨,实现了无人车与无人坦克自动控制,自动驾驶,总控制系统还是借助强大的APM,玩过的玩家就不多解释了。
无人坦克和无人车安装的固件是4.0.0版本。截止2021.02.21是目前最新的。
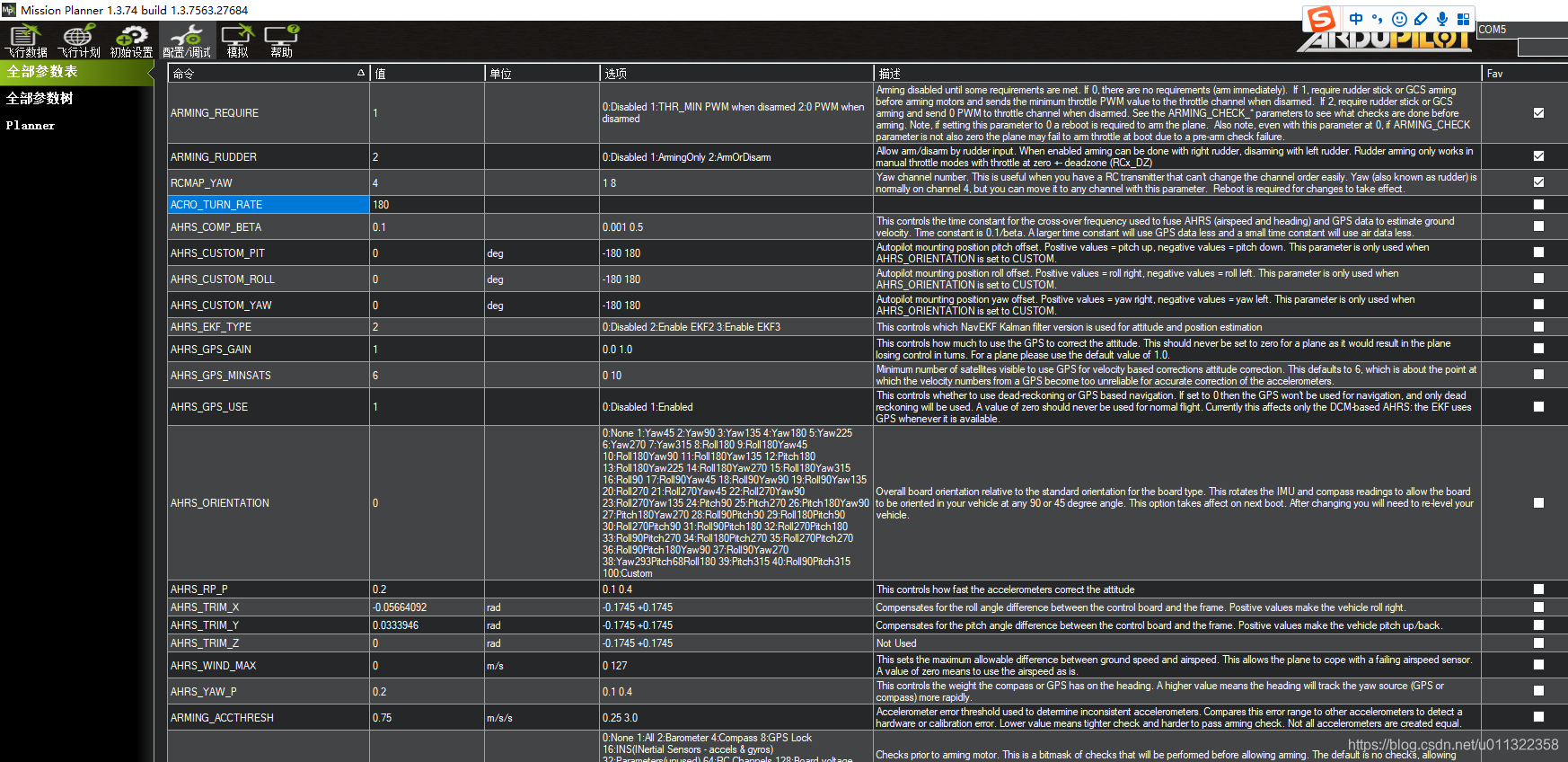
经过调试,目前自动驾驶功能很好,PID调试后,线路压得很准,现在把所有
软件与硬件调试参数共享,分享给大家!参数共享哦!!!!
不会接线,不会调参的,可以参考本人博客:
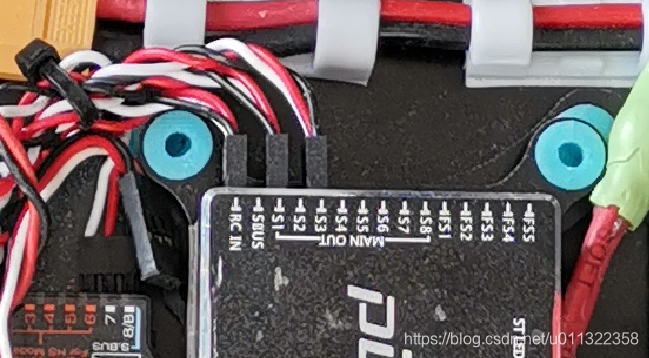
APM、Pixhawk、Pixhack端口定义接线图
https://blog.csdn.net/u011322358/article/details/104219594
基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第一篇)安装调试
https://blog.csdn.net/u011322358/article/details/104198388
基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第二篇)软硬件参数调试
https://blog.csdn.net/u011322358/article/details/104206574
基于Ardupilot/PX4固件,APM/PIXhawk硬件的VTOL垂直起降固定翼软硬件参数调试(第三篇)故障保护及问题诊断
https://blog.csdn.net/u011322358/article/details/104208189
一、飞控接线
与常规接线不同的是,无人车与无人坦克的控制,**1通道接方向,3通道接油门**,其余不用。
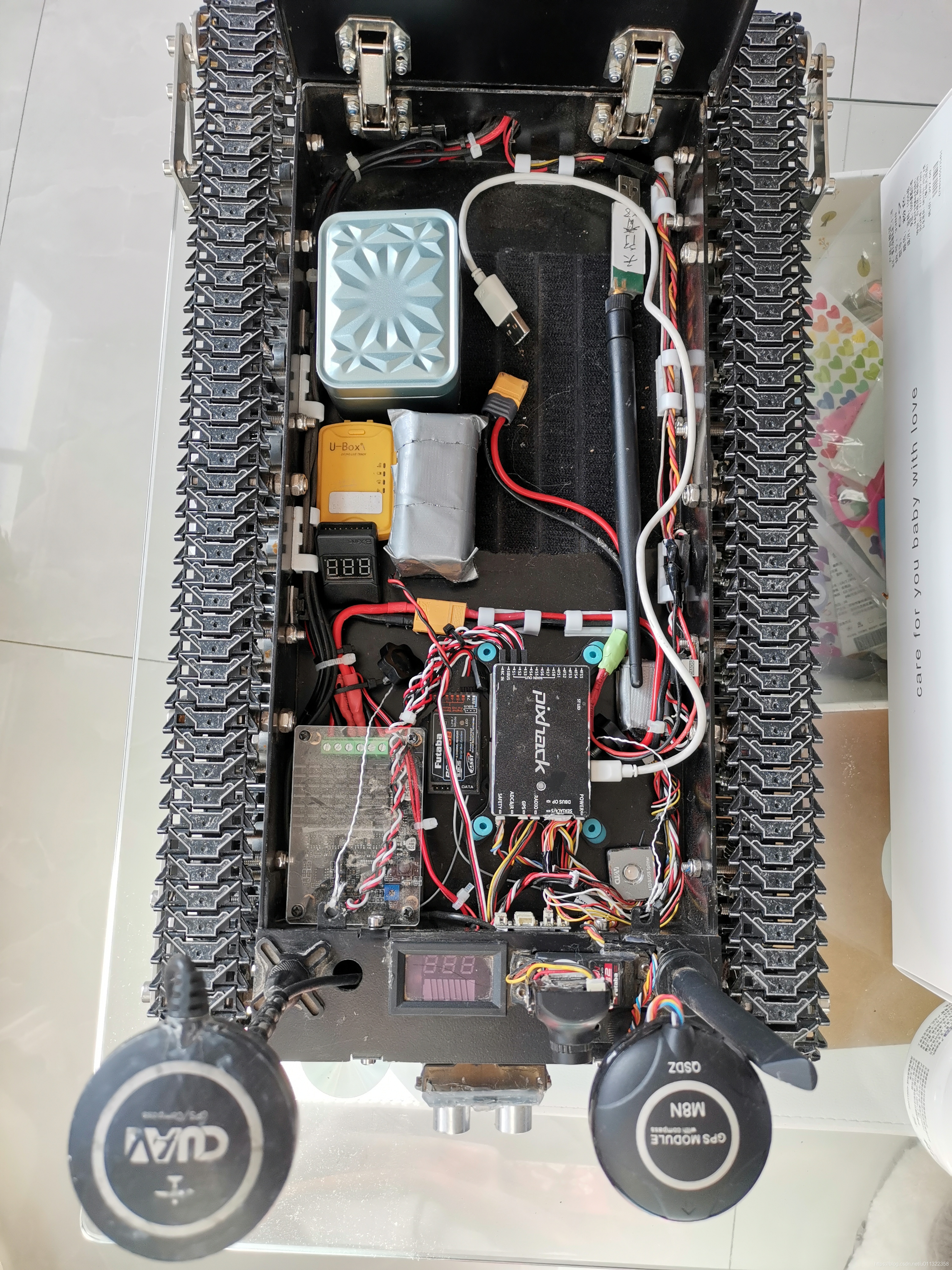
***坦克底盘***
**

无人车架

二、无人坦克、无人车整体


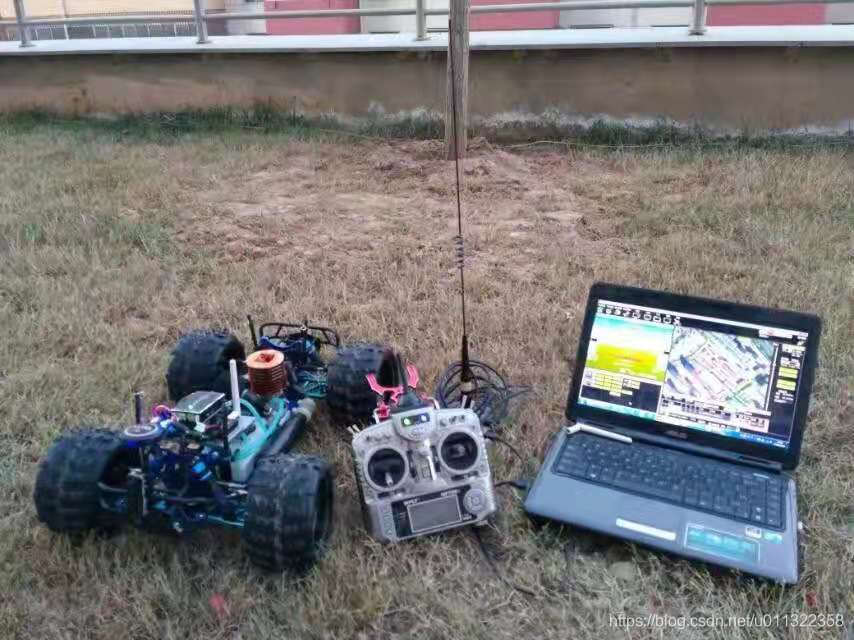

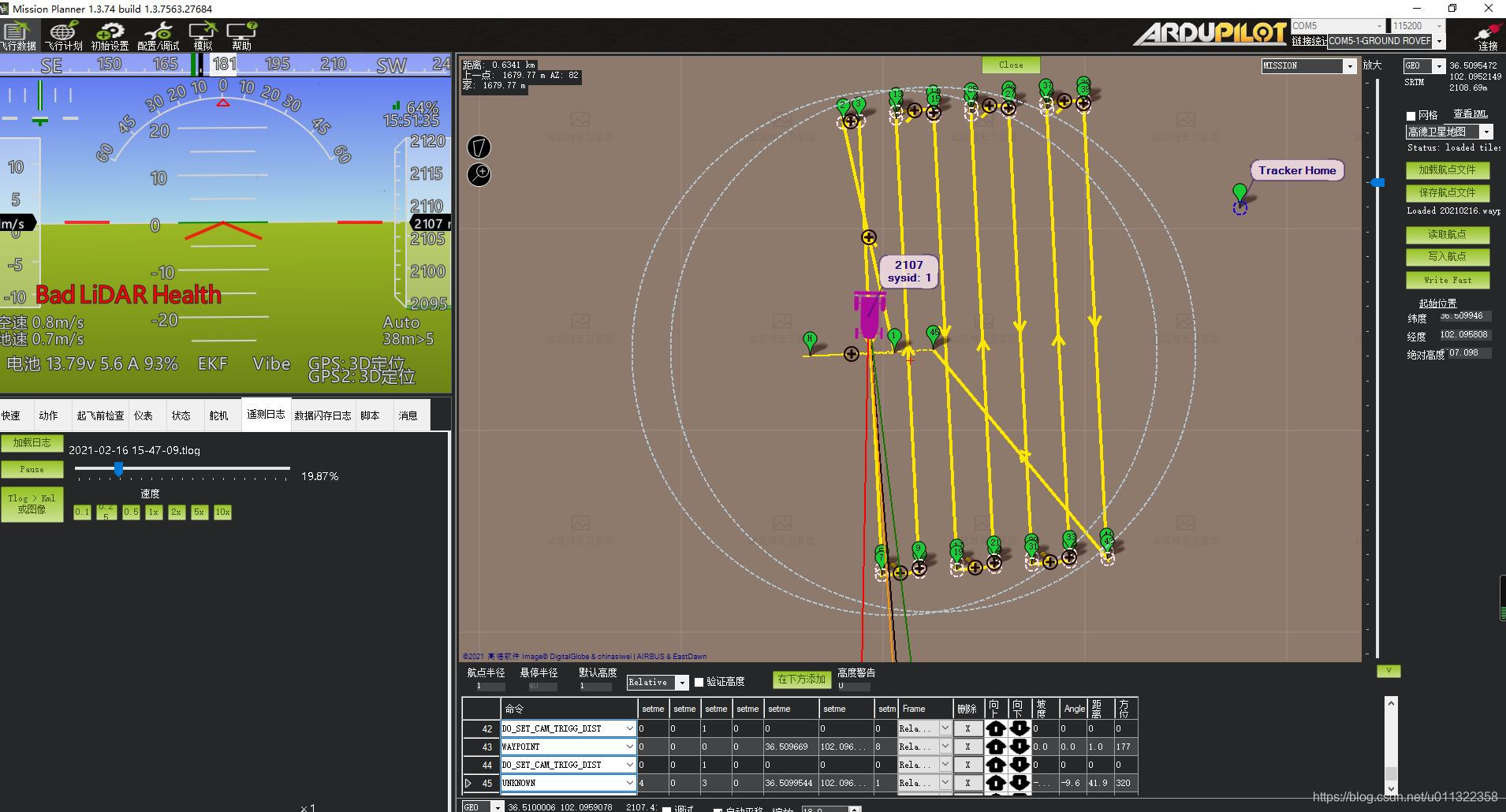
三,无人坦克、无人车,自动路径规划线路测试运行

四、调试后共享固件
直接上csdn链接
https://download.csdn.net/download/u011322358/15404879
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)