一.jetson tx2 nx系统烧录
(一)所需材料:
安装有Ubuntu 18.04系统的PC一台、
Jetson设备和电源、
Type-C接口的USB连接线一根
(二)刷机步骤:
- 下载系统:
链接:https://pan.baidu.com/s/1r1LbdCaAtH-zDOrmGnz9tA
提取码:0816
- 将下载下来的压缩包解压(按实际包名),耗时较长,请耐心等待(Ubuntu PC下执行命令):
tar -xf mfi_*.tbz2
-
使用Type-C接口的USB线把PC与Jetson设备连接起来(Jetson设备端口为Type-C的OTG端口)
-
在Jetson关机状态下,使用细针按住recovery button不放,再按开机键,进入recovery模式
(注:在机器外壳侧面标有rc的小孔内,即是recovery button,进入recovery模式后power led不会亮起,但可以在PC上执行lsusb发现NVIDIA设备)
-
进入刚解压的目录,执行刷机脚本并耐心等待(Ubuntu PC下执行)
sudo sh ./nvmflash.sh
- 用HDMI接上显示器,然后进入刷好的系统里面查看ip。
二、远程配置
先下载所需工具:
链接:https://pan.baidu.com/s/1tIqB15ERewk45wNuK6blDQ
提取码:0816
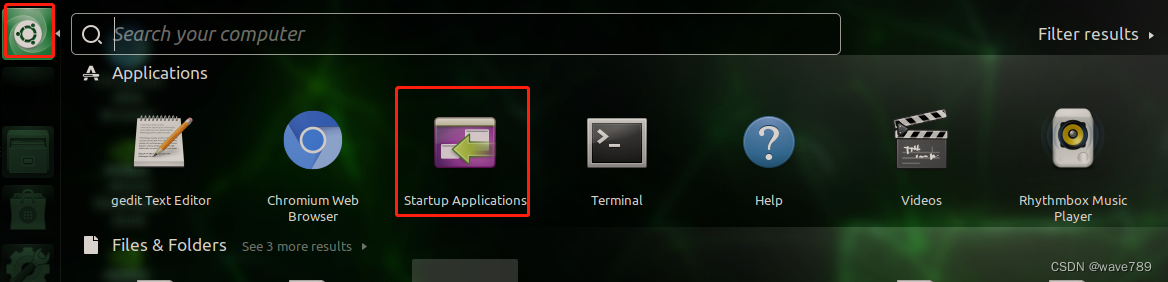
1.Windows安装putty远程SSH远程命令工具()
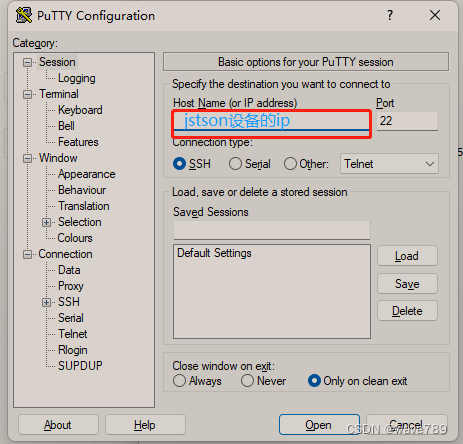
点击“open”,然后输入jetson设备的登录用户名及登录密码即可(默认密码:lcfc)
换源:
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
sudo vim /etc/apt/sources.list
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiv
sudo apt-get update
执行以下语句
cd ~
mkdir .pip
cd .pip
vi pip.conf
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple/
[install]
trusted-host = pypi.tuna.tsinghua.edu.cn
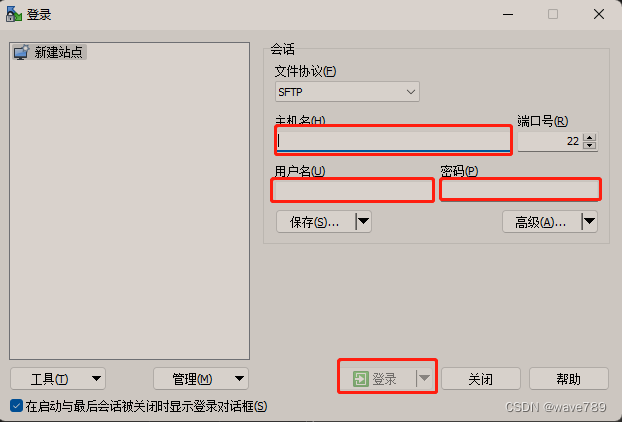
2.winSCP远程文件传输工具(填写信息同上,偷个懒~,😊😊)
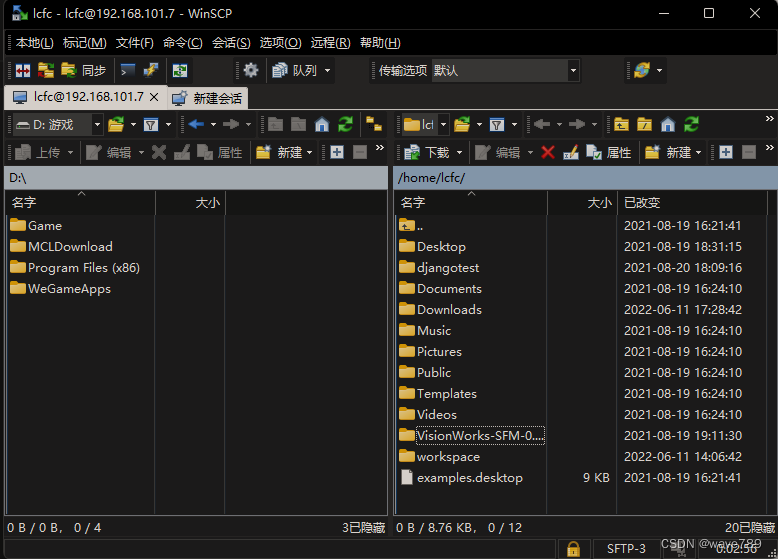
左边是本地的文件,选中一个文件,点击右键,弹出“上传”,也可以拖曳到右边;
右边是jetson设备,根据需要可以选择存放的路径。
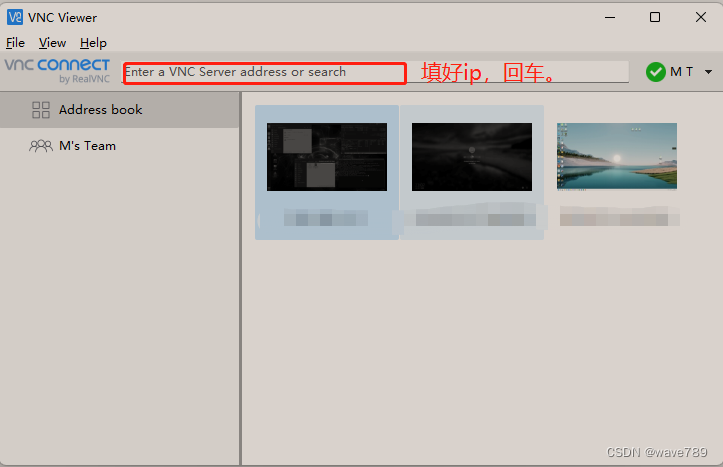
3.VNC远程控制工具
sudo apt update
sudo ln -s ../vino-server.service /usr/lib/systemd/user/graphical-session.target.wants
gsettings set org.gnome.Vino prompt-enabled false
gsettings set org.gnome.Vino require-encryption false
sudo vi /usr/share/glib-2.0/schemas/org.gnome.Vino.gschema.xml
<key name='enabled' type='b'>
<summary>Enable remote access to the desktop</summary>
<description>
If true, allows remote access to the desktop via the RFB
protocol. Users on remote machines may then connect to the
desktop using a VNC viewer.
</description>
<default>false</default>
</key>
sudo glib-compile-schemas /usr/share/glib-2.0/schemas
gsettings set org.gnome.Vino authentication-methods "['vnc']"
gsettings set org.gnome.Vino vnc-password $(echo -n '123456'|base64)
sudo reboot
...
xrandr --fb 1920x1080
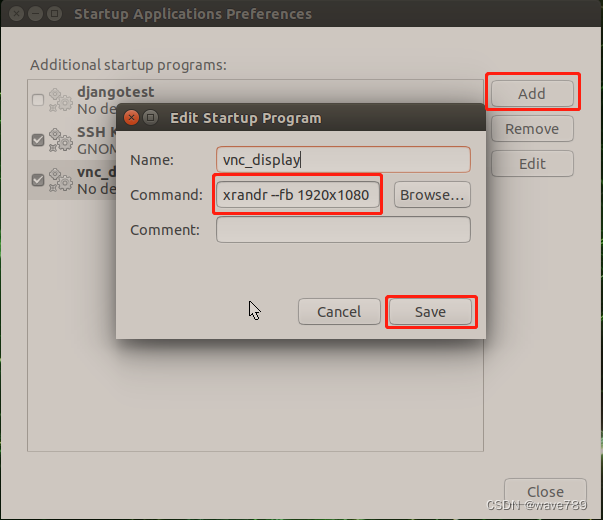
这样呢每次开机就自动设置分辨率了。
三、AI环境配置
1.安装pip
sudo apt-get install python3-pip
python3 -m pip install --upgrade pip
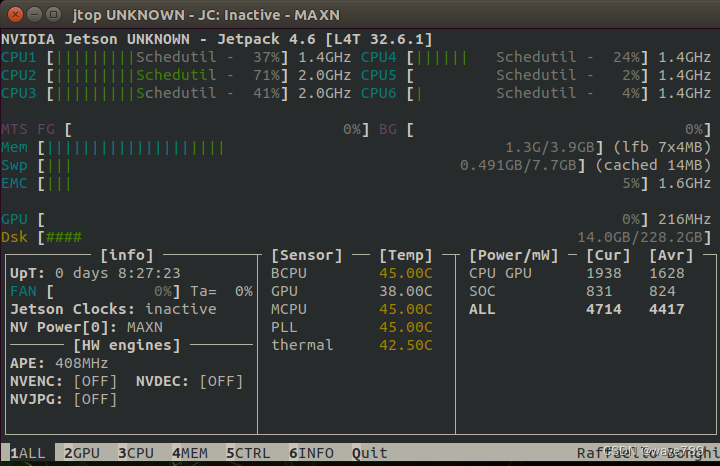
2.安装jtop监控
sudo -H pip3 install -U jetson-stats
sudo reboot
jtop
效果如下图:
3.扩大交换内存swap
sudo vim /etc/systemd/nvzramconfig.sh
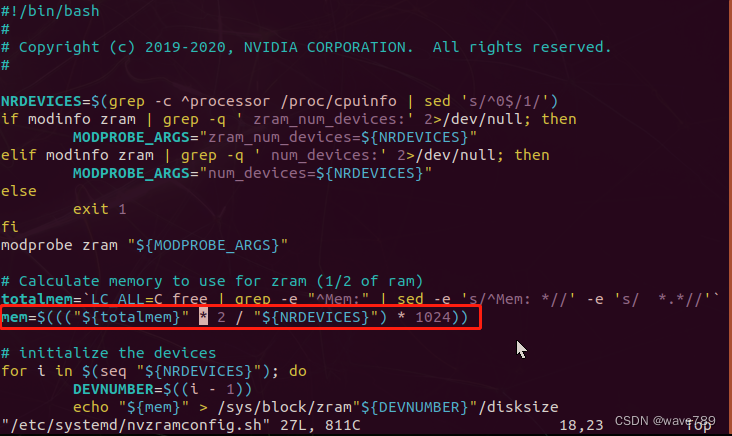
除以2===>乘以2,保存退出+重启。
4.安装pytorch、torchvision(时间会消耗很久。。。。。【可能n个小时?】)
又偷懒了:命令都在官方,Nvidia官方链接: link,下面是介绍如何看。
下载torch*.whl
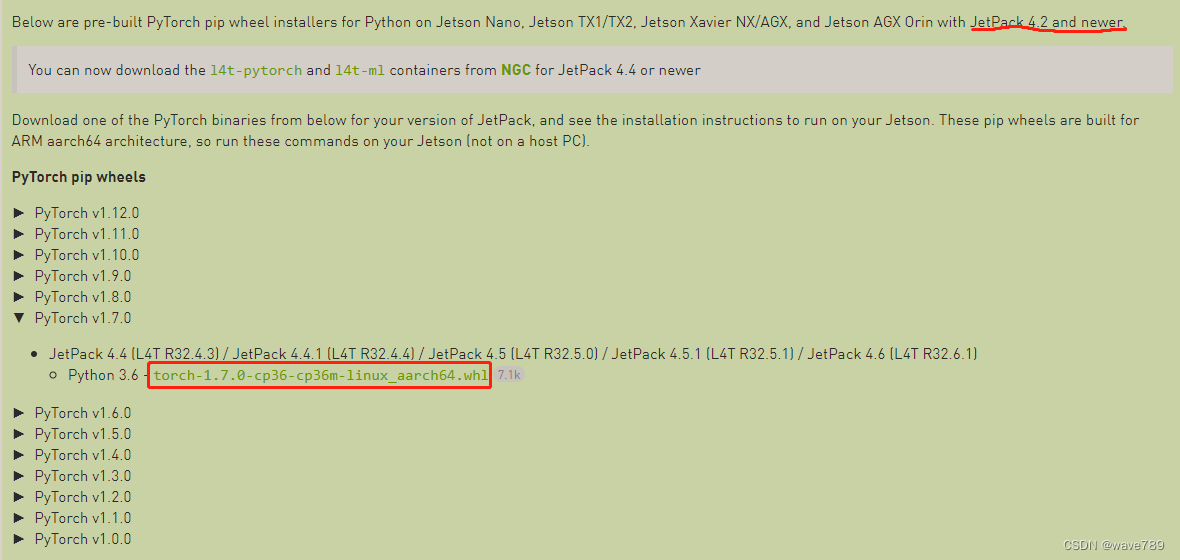
torch及torchvision安装命令介绍(巨耗时,可以睡一觉那种,耐心等待。):

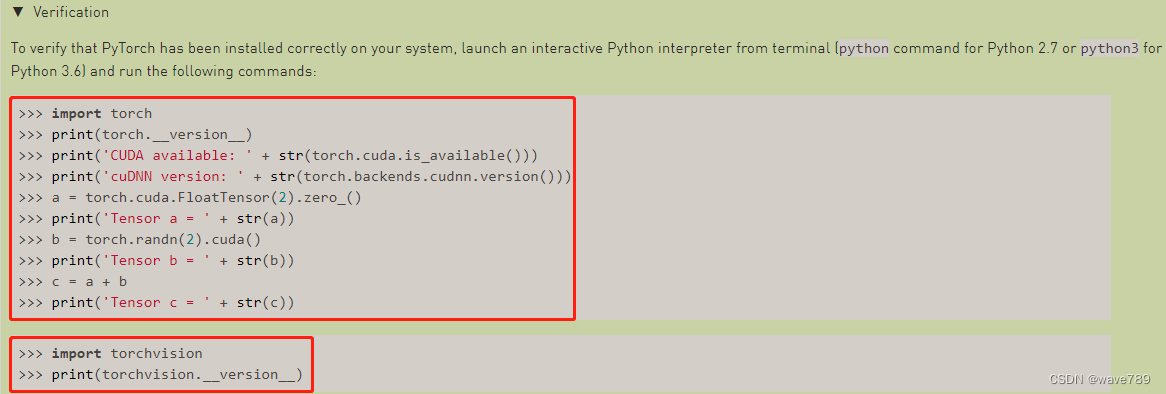
测试是否成功安装:
先进入python3,再依次执行下面命令:
5.安装yolov5相关依赖
先克隆仓库:(可以先在Ubuntu上下载好,再用winSCP传到jetson设备上。)
git clone https://github.com/ultralytics/yolov5.git
然后,安装一些编译库(我之前没有执行这步,导致直接pip3 install -r requirements.txt并未成功,耗费很多时间ಥ_ಥ。)
sudo apt-get install gfortran
sudo apt-get install libopenblas-dev liblapack-dev libatlas-base-dev libblas-dev
sudo apt-get install libjpeg8 libjpeg62-dev libfreetype6 libfreetype6-dev
(如果安装不成功,可能有些依赖我给忘了😥。)
打开requirements.txt,注释掉pillow(单独安装)。
pip3 install -r requirements.txt
pip3 uninstall pillow
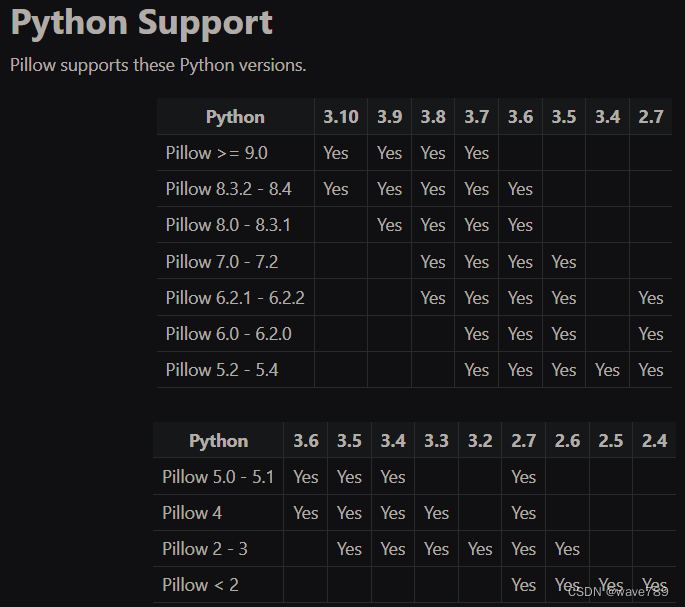
pip3 install pillow==8.4.0 --no-cache-dir
pillow与python版本的对应关系:
测试是否成功安装:
python3 detect.py --source data/images/bus.jpg --weights yolov5n.pt --img 640
6.jetson安装opencv-4.1.1
先在Ubuntu上,下载所需文件:
https://codeload.github.com/opencv/opencv/zip/refs/tags/4.1.1
https://codeload.github.com/opencv/opencv_contrib/zip/refs/tags/4.1.1
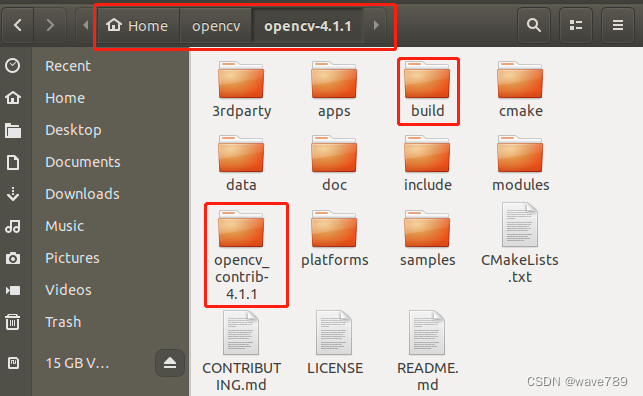
然后在jetson设备上打开home,新建opencv文件夹,
将下载的两个文件用winSCP上传到刚才的opencv文件夹下,然后分别解压,
将opencv_contrib-4.1.1剪切到opencv-4.1.1下,继续创建build 文件,并进入,右键打开终端。
换源:
未完待续。。。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)