经过几天的奋战,在综合别人的宝贵经验之后,终于把阿里云的ubuntu18.04的图形界面搭配出来了,在此把我个人的经历分享给大家参考一下
首先声明:我是参考原博主的经验搭建出来的,具体链接可以参考:https://blog.csdn.net/weimine/article/details/69055536
附上截图:
非常感谢他的无私分享,也感谢csdn的各位大神
我这篇论文是对他的补充说明,因为我在安装的时候出现过不少问题,但最终都顺利解决了。
第一步照做:
1 sudo apt-get update
2 sudo apt-get upgrade

需要注意的是我在执行第二步的时候出现如下问题:

老老实实按着程序的要求去做,要求卸载就卸载:
apt autoremove linux-headers-4.4.0-87
apt autoremove linux-headers-4.4.0-87-generic
apt autoremove linux-image-4.4.0-87-generic
apt autoremove linux-image-extra-4.4.0-87-generic
这三部做完之后接着:

在执行第二部 apt-get install gnome之后会出现两个选项,具体没有截图到,请各位选择第二个,我就是因为这个问题重装了好几遍才顺利通过的

反正选择不带g开头的选项就对了,图片当时没有立刻截到,请各位谅解
再下来走到这一步了
sudo apt-get install x-window-system-core
sudo apt-get install gnome-core
sudo apt-get install language-pack-gnome-zh-hant
sudo apt-get install scim
sudo apt-get install gdm
sudo apt-get install synaptic
最后这一步
sudo apt-get install --no-install-recommends ubuntu-desktop
sudo add-apt-repository ppa:embrosyn/cinnamon
sudo apt update
sudo apt install cinnamon

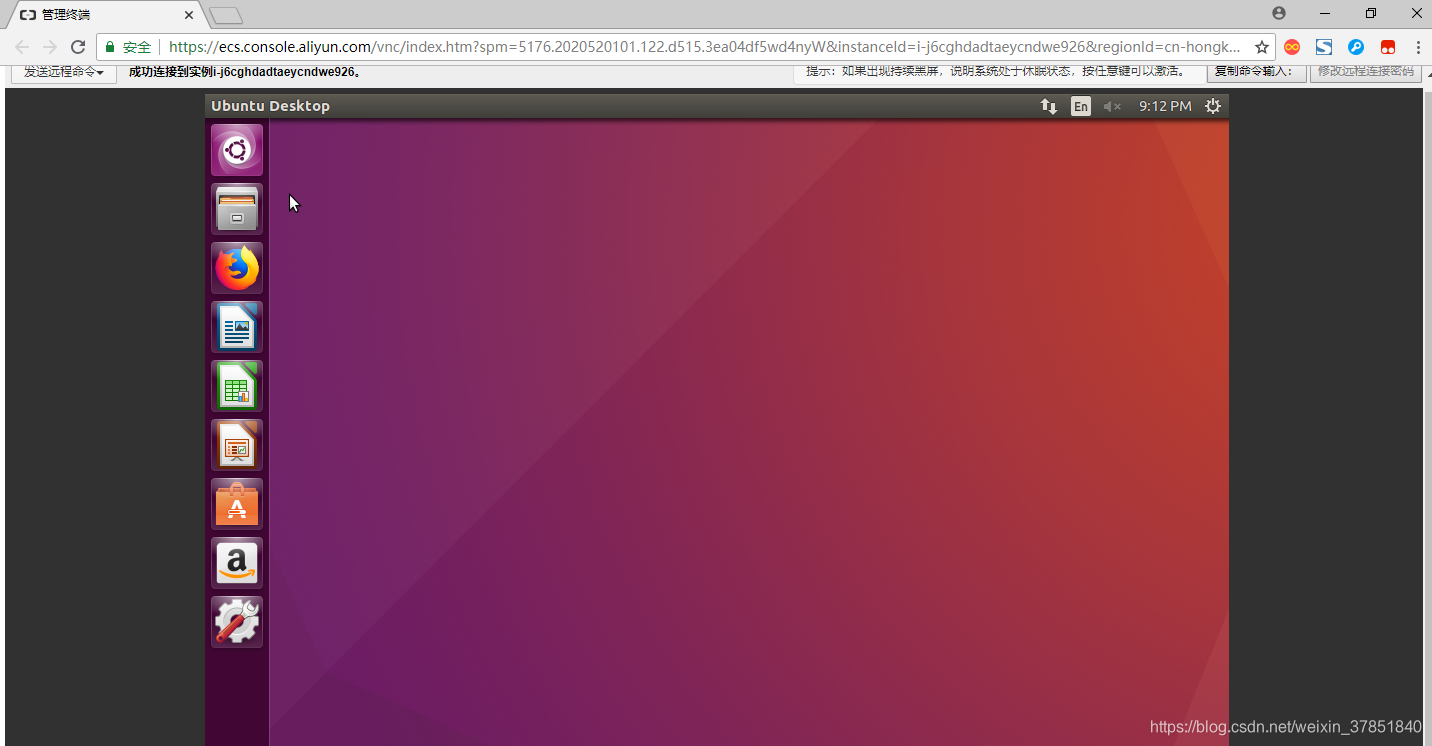
最终搭建出来的效果如下:
最后的补充:
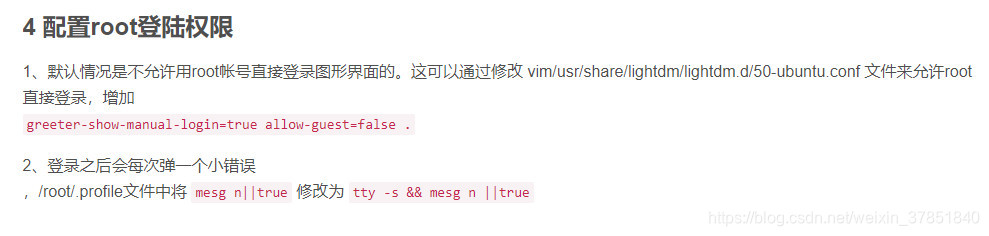
1、默认情况是不允许用root帐号直接登录图形界面的。这可以通过修改 vim/usr/share/lightdm/lightdm.d/50-ubuntu.conf 文件来允许root直接登录,增加
greeter-show-manual-login=true allow-guest=false .
2、登录之后会每次弹一个小错误
,/root/.profile文件中将 mesg n||true 修改为 tty -s && mesg n ||true
作者:睿客杨-RekerYang 编辑 :www.huashengyou.shop
来源:CSDN
原文:https://blog.csdn.net/weimine/article/details/69055536
版权声明:本文为博主原创文章,转载请附上博文链接!
总算是写好了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)