一般情况下,我们的项目各个子项目都在一个总的项目根目录下,但有的时候,我们需要使用外部的文件夹,怎么办呢?例如,在目录cxx/utility/example内的CMakeLists.txt要引用上层目录cxx/utility的CMakeLists.txt:
通常,如果在cxx/utility/example内的CMakeLists.txt直接使用。
add_subdirectory(${CMAKE_CURRENT_SOURCE_DIR}/..)
执行cmake -B build,则会报错:
CMake Error at CMakeLists.txt:14 (add_subdirectory):
add_subdirectory not given a binary directory but the given source
directory "D:/workspace/sdk/base/cxx/utility" is not a subdirectory of
"D:/workspace/sdk/base/cxx/utility/example". When specifying an
out-of-tree source a binary directory must be explicitly specified.
报错原因:因为要添加的这个文件夹不是当前项目的子目录。最后一句指明了方向:要指定一个外部的文件夹必须显式指定。 但怎么显式指定?查看官方文档。
 原来
原来add_subdirectory还有一个 binary_dir参数,这个参数用来指定source_dir在输出文件夹中的位置,如果没有指定的时候,就用source_dir的值。 如果要添加外部文件夹则binary_dir就必须指定。cxx/utility/example内的CMakeLists.txt修改为:
add_subdirectory(${CMAKE_CURRENT_SOURCE_DIR}/.. 3rdparty/base/utility)
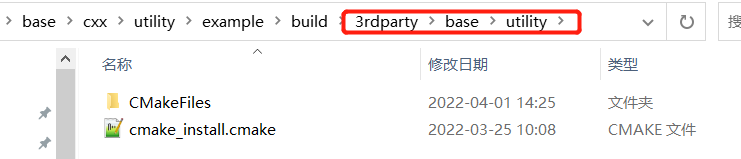
执行cmake -B build后可以在输出目录发现多出了子目录3rdparty/base/utility,这个就是第二个参数binary_dir所指定的:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)