三角法求深度(triangulation)
在知道了相机的轨迹以后,使用三角法就能计算某个点的深度,在Hartley的《Multiple view Geometry》一书中第10章、第12章都是讲的这个,这里只讲解线性求解方法。
 对于三维空间中的一点
P
,我们假设第一个摄像机坐标系C1就是世界坐标系,P在世界坐标系下的表示为
P=(x,y,z,1)T
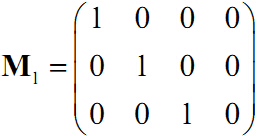
,这时,摄像机坐标系
C1
的外参数矩阵
M1
为单位矩阵。
对于三维空间中的一点
P
,我们假设第一个摄像机坐标系C1就是世界坐标系,P在世界坐标系下的表示为
P=(x,y,z,1)T
,这时,摄像机坐标系
C1
的外参数矩阵
M1
为单位矩阵。
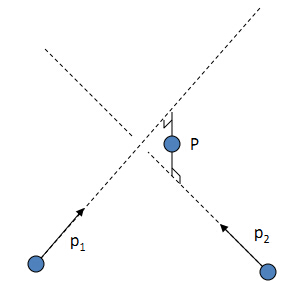
 点
P
和光心的连线交第一个图像平面于点p1 ,注意这里的
p1
是在摄像机坐标系的坐标表示,不是在图像坐标系下,这在上一篇博客中已经强调。同理,和第二个摄像机光心连线交第二幅图像于点
p2
。
pi
在各自摄像机坐标系中的表示为:
点
P
和光心的连线交第一个图像平面于点p1 ,注意这里的
p1
是在摄像机坐标系的坐标表示,不是在图像坐标系下,这在上一篇博客中已经强调。同理,和第二个摄像机光心连线交第二幅图像于点
p2
。
pi
在各自摄像机坐标系中的表示为:
p1=⎛⎝⎜x1y11⎞⎠⎟c1
和
p2=⎛⎝⎜x2y21⎞⎠⎟c2
摄像机坐标系
C2
的外参数矩阵为
M2
,由于摄像机坐标系
C1
就是世界坐标系,所以有
 在推导本征矩阵
E
的时候,我们说R是从坐标系
C2
到坐标系
C1
的旋转变换矩阵,即
12R
。t是平移,更确却的说是光心
C2
在
C1
中的坐标表示,即
1t2
。所以在通过8点法求出的R,T以后,得到的从摄像机坐标2变换到到摄像机坐标系1的变换矩阵为
在推导本征矩阵
E
的时候,我们说R是从坐标系
C2
到坐标系
C1
的旋转变换矩阵,即
12R
。t是平移,更确却的说是光心
C2
在
C1
中的坐标表示,即
1t2
。所以在通过8点法求出的R,T以后,得到的从摄像机坐标2变换到到摄像机坐标系1的变换矩阵为
12H=[R3×30t3×11]
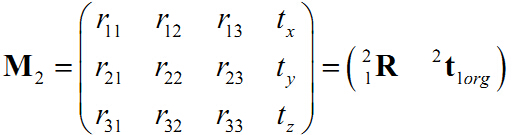
而这里的外参数矩阵
M2
是将世界坐标系中的一点P投影到摄像机坐标系
C2
。所以
M2=21H=12H−1
,只需去掉H矩阵的最下面一行齐次坐标就行了。所以,通过本征矩阵得到R,t以后,要计算摄像机坐标系
C2
外参数矩阵的程序如下:
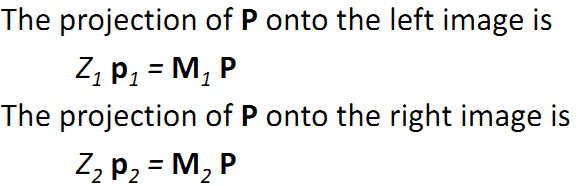
 有了外参矩阵,我们就可以得到这些点坐标的关系:
有了外参矩阵,我们就可以得到这些点坐标的关系:
 由于光心
Ci
,三维坐标点P,以及
pi
三点共线,所以向量
Cipi、CiP
的叉乘应该为0,上述方程又可以转化为:
由于光心
Ci
,三维坐标点P,以及
pi
三点共线,所以向量
Cipi、CiP
的叉乘应该为0,上述方程又可以转化为:
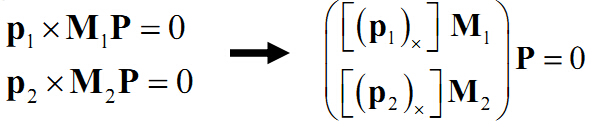 这又是一个要用最小二乘求解的线性方程方程组 ,和求本征矩阵一样,计算矩阵A的SVD分解,然后奇异值最小的那个奇异向量就是三维坐标P的解。程序如下:
这又是一个要用最小二乘求解的线性方程方程组 ,和求本征矩阵一样,计算矩阵A的SVD分解,然后奇异值最小的那个奇异向量就是三维坐标P的解。程序如下:
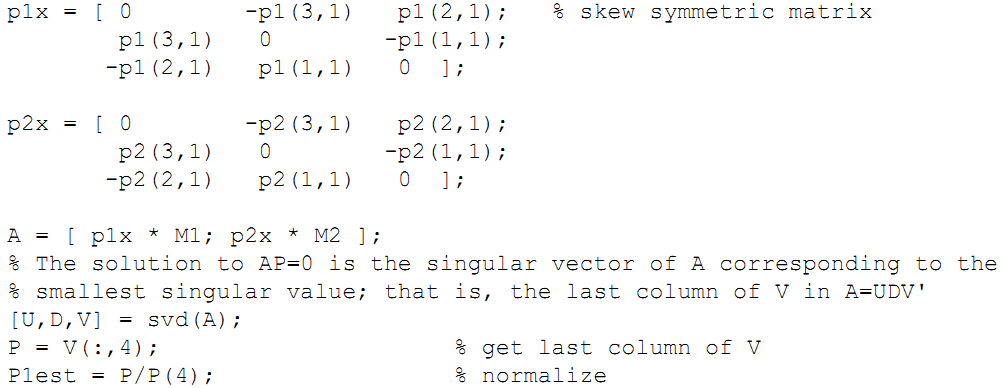 计算出来的P的坐标就是P在世界坐标系中的坐标,这里就是P在摄像机坐标系
C1
中的表示。并且注意上篇博客中强调过的:
p1=K−1⎛⎝⎜u1v11⎞⎠⎟
、
p2=K−1⎛⎝⎜u2v21⎞⎠⎟
计算出来的P的坐标就是P在世界坐标系中的坐标,这里就是P在摄像机坐标系
C1
中的表示。并且注意上篇博客中强调过的:
p1=K−1⎛⎝⎜u1v11⎞⎠⎟
、
p2=K−1⎛⎝⎜u2v21⎞⎠⎟
上篇博客中还提到本征矩阵恢复的R,T组合有四种组合形式,我们需要通过计算点的深度来判断R,T的哪种组合是正确的,和这篇博客结合起来,获得R,T正确组合的流程和代码如下:
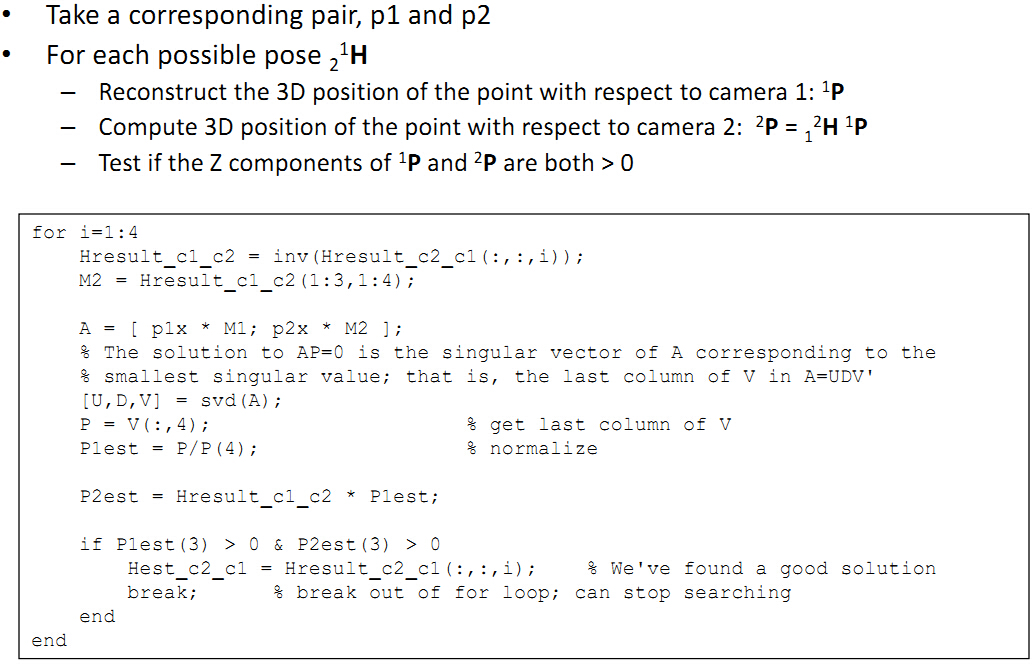
在以上计算P三维坐标的推导过程中,可以看到和本征矩阵E是息息相关的,E和我们的尺度紧密相连,所以计算出来的深度和尺度scale也是直接相关的。同时,根据这种三角法(triangulation )计算的深度,其实是不怎么靠谱的,一般只是拿这个做一个初始值。并且,我们还可以初略的看看深度估计误差和什么有关。
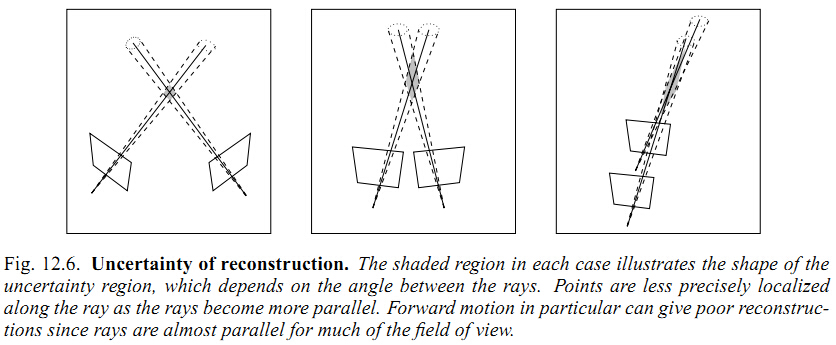
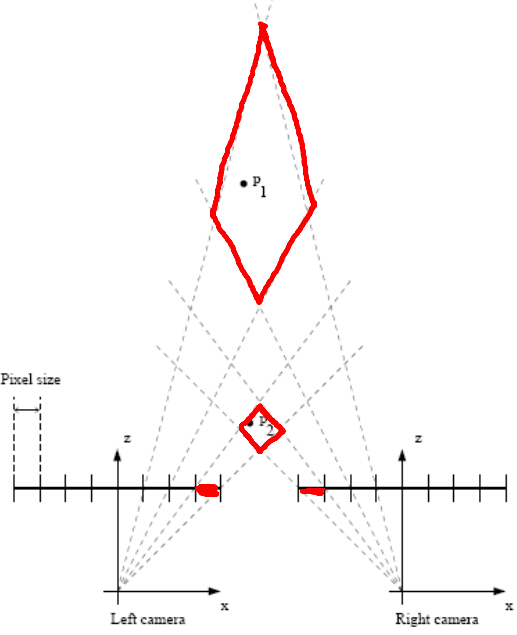 从两幅图中可以看出,两个射线夹角越小,误差协方差越大。所以点到光心连线组成的射线向量在orbslam中是有明确记录的。
从两幅图中可以看出,两个射线夹角越小,误差协方差越大。所以点到光心连线组成的射线向量在orbslam中是有明确记录的。
在理顺了这系列流程,有了基本的视觉基础以后,就可以开始向svo,orb_slam,lsd_slam前进了。但是这些算法的深度估计都是用概率模型来更新深度,不用怕,不变应万变,在后续的博客中,我们将一一剖析。最后,再推荐下这本书《Mastering OpenCV with Practical Computer Vision Projects》,里面有一章专门教一步步用opencv写structure from motion的程序,内容实在是牛的飞,赶紧去看看动手自己写写程序吧,祝好。
(转载请注明作者和出处:
http://blog.csdn.net/heyijia0327 未经允许请勿用于商业用途)
reference:
博客主要参考了 professor William Hoff 的课件《structure from motion》
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)