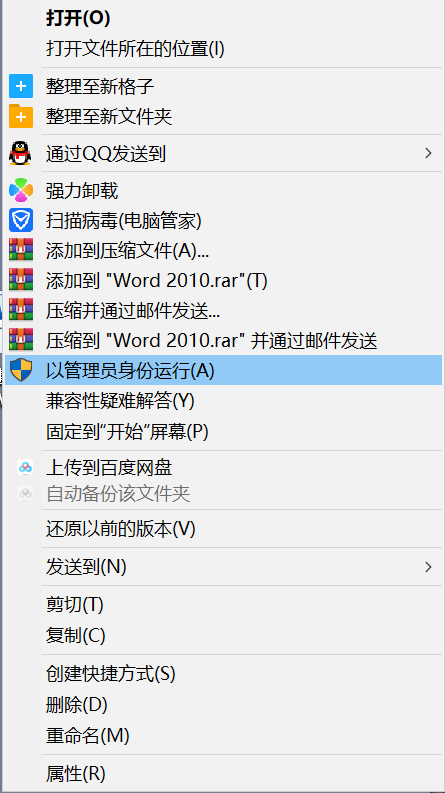
1、用管理员的身份运行word:找到word---右键---以管理员的身份运行
2、打开一个word- 文件--选项-加载项---转到--选择endnote cite while you write---点击删除(删除前记住你的endnote cite while you write所在位置,即图片标黄的地方)

Endnote的位置信息

3、在COM加载项窗口,点击添加--找到你的endnote cite while you write的位置--确定,就能看到重新添加的endnote cite while you write--前面打钩--确定--这时候word的菜单栏里就有endnote了
注意:
如果此时重新添加Endnote还是解决不了问题,你需要把 EndNote Cwyw.dll 文件放在 word对应的文件保存路径,建一个名字是“ startup”文件夹,EndNote Cwyw.dll 放进去,重新加载此处的 EndNote Cwyw.dll 即可;
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)