下载官方grbl代码,并进行修改使其正确
1 .问题:购买了328p单片机,购买了grbl的底板,但是烧录之后无法正常使用
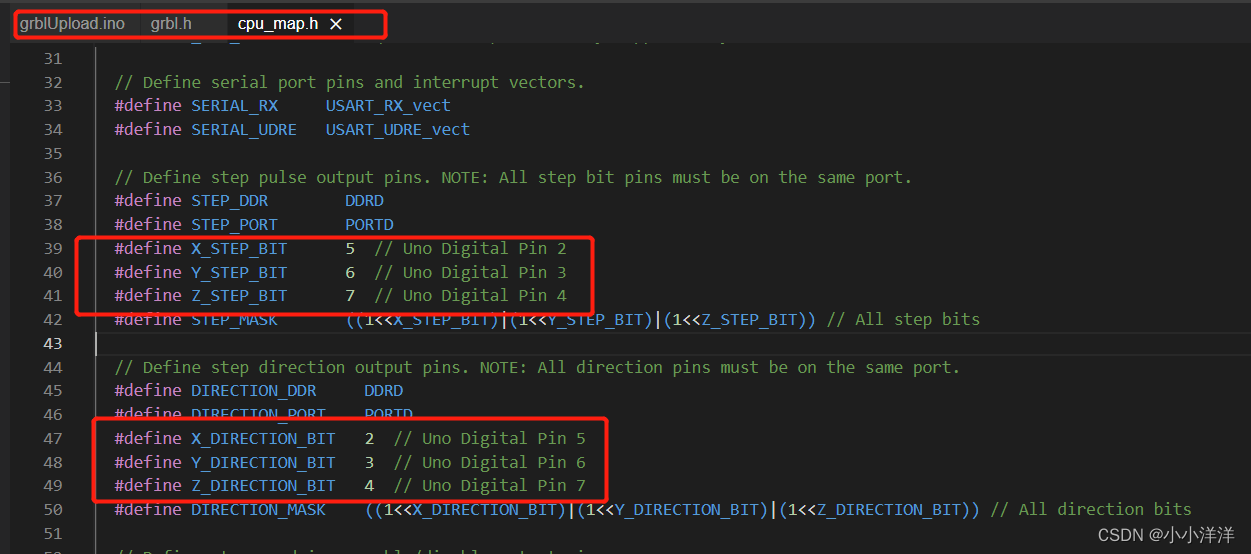
- 问题发现:引脚错误了,官方代码中的引脚需要修改;底板的引脚说明使错误的
- 修改说明:通过观察主板,修改好对应的引脚即可。
- 额外处理:由于主板的跳帽只有上拉 ,无法下拉到底,导致DRV8825芯片无法32细分,需要在背面进行焊接,使其与地相连
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)