Ir2014驱动电路及自举电容的应用
以前做智能车的时候用H桥驱动电路,驱动芯片就是用的IR2104,MOS管用的IR7843,想把以前的知识总结一下。
1、 为什么需要H桥电路? 因为驱动电机正反转,我们用的是有刷直流电机,如果要电机反转,只需要将电源线和地线调换一下顺序即可,调换顺序之后,线圈在磁场中的受力方向和以前相反,因此电机反转,可以根据初中学的通电导体在磁场中的受力方向来分析。可以通过一下视频来更详细的了解。

而我们需要电机正反转则需要切换电机两端电源的方向,因此H桥电路是一个很好的选择。
2、IR2104
IR2104 的的驱动电压是12V,当初电池供电只有8V,所以用了MC34063做了升压电路对它供电。
IR2104引脚定义
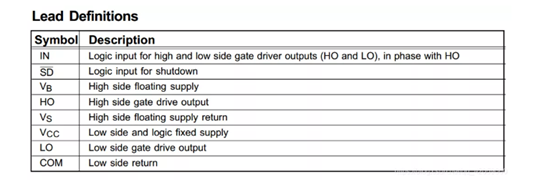
SD信号 为使能信号,SD 上面有个横杠,代表低电平,也就是说,当SD为低电平的时候,Logic input for shutdown(输入被禁止)。因此SD为高电平时,芯片才可以正常工作。
IN为高电平时HO为高电压(VS+ VB),LO为低(接近于0);IN为低电平时,HO为低,LO为高电平。我们的PWM信号就是在这里输入,输入信号为5V(这个要注意,单片机的输出电平最高为3.3V,因此采用74HC7408D做了电平转换)
输入逻辑高和低:

Vb是高侧浮动电源输入脚,HO是高侧门极驱动输出,Vs是高侧浮动电源回流。这三个控制上半桥的MOS导通。
Vcc是电源输入脚,LO是低侧门极驱动输出,COM是低侧回流(公共回路)。这三个控制下半桥的MOS导通。
自举电路
1.A状态为默认状态,此时开关A闭合,开关B断开,Q1导通,C1负极与地导通,电流从电源V1出发,通过S1,经过C1,经过Q1,再流回电源V1。达到稳态后,由于二极管的PN结0.7V压降,电容上端对地电压为5.3V,下端对地电压为0V。

2.当开关B闭合,开关A断开,Q1截止,电容下端电压相对于地来说是电源电压6V。由于电容两端电压不能突变,电容上端相对电容下端,电压为5.3V,因此电容上端相对于地的电压为5.3V + 6V =11.3V,与电压探针测得值基本一致。
实际的模型中,MOS管和二极管都不是理想元器件,因此都存在一定的漏电流,因此自举电路需要不断切换状态来对自举电容充放电,来保证电压被长时间抬起来,且自举电路的供电能力取决于自举电容的大小。对于我们的H桥驱动电路,只有不断切换开关状态,才能使得自举电容不断充电。
IR2104的典型电路及原理:

当IN输入低电平时,HO输出低电平,LO输出高电平,Q1断开,Q2导通,通过+12V ->D1->C1->Q2->GND 对电容C14充电至接近电源电压,也就是12V,当IN输入高电平,HO输出高电平,VS输出低电平,关键就在于HO输出的高电平电压是多大,一开始默认输出高电压就是电源电压12V,但是VB和HO内部是连在一起的。上一次对电容充电完毕之后,电容两端电压不能突变,电容两端电压为12V,Q1导通后,VS电压被抬升至右侧驱动端的电压,因此VB和电容下端总有一个12V左右的电压,正式因为这12V的压差,才得以使得上管Q1持续导通,如果没有这个自举二极管,我们用的是NMOS,GS之间需要有一个正的阈值电压才能导通,HO输出12V,VS也是12V,压差接近于0,因此NMOS就不能够导通。自举电容C1作为一个浮动的电压源驱动Q1,导通上桥臂;而Q2开通后,Q1关断,Vs处的浮动电源消失,C1在开通期间损失的电荷在又会得到补充。如此循环,即可控制Q1和Q2进行半桥驱动。这种自举供电方式就是利用Vs端的电平在高低电平之间不停地摆动来实现的,由于自举电路无需浮动电源,因此是最便宜的。
因为自举电容器上的电压基于高端输出晶体管源极电压上下浮动,所以图中的D1和C1是IR2104在脉宽调制(PWM)应用时最需要严格挑选和设计的元器件。只有根据一定的规则进行计算分析,并在电路实验时进行调整,才能使电路工作处于最佳状态。
栅极电阻:因为MOS管是压控性器件,需要的电流很小,但是MOS管是由寄生电容的,在NMOS管的GS级之间,也就是栅源之间有一个寄生电容,善缘电容,如果不加电阻的话,可能会导致电流很大,其实对于MOS管的栅极电压控制,也就是控制对栅极电容的充电过程,栅极电阻不能太大20-100欧姆即可,太大了会影响栅源电容的充电时间,太小可能会引起电流震荡。其实可以在栅极和地之间加一个电阻,称为泻放电阻,使得栅极的电压能够迅速释放,使得MOS管能够加速关断。还有一个原因是因为MOS管的寄生电容,可能会导致上电瞬间对电容充电,充电瞬间电容瞬间对地短路,可能也会造成电路的损坏,加一个泻放电阻也起一个限流作用。
下面是IR2104驱动电路仿真图,我用的是Proteus进行的仿真,用multisim不知道哪个参数不对,导致自举电容没有电压叠加。
二极管是为了防止VB端的高电压对12V 电压进行倒灌,VB电压高于12V电源电压时,二极管截止。
波形我们选择的是方波,输入频率是22kz,输入高电平是5V高电平电压要大于IR2104的高电平阈值。

示波器一个格的幅值为5V。
黄色波形是PWM输入波形幅值,占了一个格,为5V;
蓝色VS两端电压,应该是12V到0V的方波,占了一个格多一点。
红色是VB端电压,他的电压是驱动电压+电容两端的电压,也就是24到0V之间跳变的方波,占两个格多一点。
绿色为LO输出电压波形,输出电压为12V到0V跳变的方波,占一个格多一点。
以上就是对IR2104驱动电路的总结,谢谢。
---------------------
作者:woai32lala
链接:https://bbs.21ic.com/icview-3193682-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)