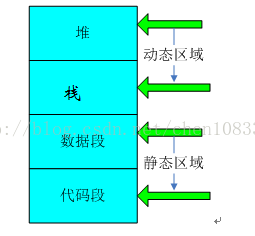
C/c++程序经过编译连接后形成的二进制映像文件,这文件包含:
栈,堆,数据段(只读数据段,已经初始化读写数据段,未初始化数据段即BBS)和代码段组成.
1.栈区(stack):
由编译器自动分配释放,存放函数的参数值,局部变量等值。其操作方式类似于数据结构中的栈。
2.堆区(heap):
堆允许程序在运行时动态地申请某个大小的内存。
一般由程序员分配释放,若程序员不释放,则可能会引起内存泄漏。
注堆和数据结构中的堆栈不一样,其类是与链表。
3.程序代码区:存放函数体的二进制代码。
所有的语句编译后会生成CPU指令存储在代码区.
4.数据段:由三部分组成:
<1>只读数据段:
只读数据段是程序使用的一些不会被更改的数据,使用这些数据的方式类似查表式的操作,由于这些变量不需要更改,因此只需要放置在只读存储器中即可。一般是const修饰的变量以及程序中使用的文字常量一般会存放在只读数据段中。
<2>已初始化的读写数据段:
已初始化数据是在程序中声明,并且具有初值的变量,这些变量需要占用存储器的空间,在程序执行时它们需要位于可读写的内存区域内,并且有初值,以供程序运行时读写。在程序中一般为已经初始化的全局变量,已经初始化的静态局部变量(static修饰的已经初始化的变量)
<3>未初始化段(BSS):
[
BSS段通常是指用来存放程序中未初始化的全局变量和静态变量的一块内存区域。
特点是可读写的,在程序执行之前BSS段会自动清0。
]
未初始化数据是在程序中声明,但是没有初始化的变量,这些变量在程序运行之前不需要占用存储器的空间。与读写数据段类似,它也属于静态数据区。但是该段中数据没有经过初始化。未初始化数据段只有在运行的初始化阶段才会产生,因此它的大小不会影响目标文件的大小。在程序中一般是没有初始化的全局变量和没有初始化的静态局部变量。
附加说明:
常量区(特殊的常量存储区,属于静态存储区)
1) 常量占用内存,只读状态,决不可修改
2) 常量字符串就是放在这里的,程序结束后由系统释放
-----------------------------------------------------------------------------------------------------------------
动态存储方式
所谓动态存储方式是指在程序运行期间根据需要进行动态的分配存储空间的方式。
动态存储变量是在程序执行过程中,使用它时才分配存储单元, 使用完毕立即释放。
典型的例子是函数的形式参数,在函数定义时并不给形参分配存储单元,只是在函数被调用时,才予以分配,调用函数完毕立即释放。如果一个函数被多次调用,则反复地分配、释放形参变量的存储单元。
-----------------------------------------------------------------------------------------------------------------
动态存储区:
1.栈和堆
栈:会存放函数的返回地址、参数和局部变量。
堆:我们通过 new 算符和 malloc 函数分配得到的空间。
堆和栈在内存中分配位置,跟硬件架构和操作系统都有关系。
x86中栈都是由高地址向低地址分配,堆是由低地址向高地址分配,不过在 Windows 和 Linux 中堆和栈的位置相反,另外存放静态数据、代码的区域位置也有一些不同。
栈是属于线程的,每一个线程会有一个自己的栈。
2.局部自动变量
存放在栈区,在栈区里面其实又可以分成好几个区域,他们叫做栈桢,一个栈桢就是一个函数,需要调用该函数的时候就如入栈,函数return的时候就会弹出栈,所以他们的生命周期是从函数的开始直到函数结束。
而栈帧里面又存放着什么呢,栈帧存放着以下几种东西:参数变量的地址,局部变量的地址,return的地址(还有栈指针和基指针,想知道这个是就什么百度吧)
3.自动变量(未加static声明的局部变量) ;
4.函数调用时的现场保护和返回地址等;
5.动态变量
通常是由malloc new等分配的空间,生命周期是从分配的那一刻直到free结束。
-----------------------------------------------------------------------------------------------------------------
静态存储方式
所谓静态存储方式是指在程序编译期间分配固定的存储空间的方式。
该存储方式通常是在变量定义时就分定存储单元并一直保持不变,
直至整个程序结束。全局变量,静态变量等就属于此类存储方式。
静态存储区:
一定会存在的而且会永恒存在、不会消失,这样的数据包括常量、常变量(const 变量)、静态变量、全局变量等。
静态 、常量、全局变量就是存放在静态存储区,他们在程序编译完成后就已经分配好了,生命周期持续至程序结束。
-----------------------------------------------------------------------------------------------------------------
一、预备知识—程序的内存分配
一个由C/C++编译的程序占用的内存分为以下几个部分
1、栈区(stack):由编译器自动分配释放 ,存放函数的参数值,局部变量的值等。其 操作方式类似于数据结构中的栈。
2、堆区(heap) :一般由程序员分配释放, 若程序员不释放,程序结束时可能由OS回收。注意它与数据结构中的堆是两回事,分配方式倒是类似于链表,呵呵。
3、全局区(静态区)(static):全局变量和静态变量的存储是放在一块的,初始化的全局变量和静态变量在一块区域, 未初始化的全局变量和未初始化的静态变量在相邻的另一块区域。程序结束后由系统释放。
4、文字常量区:常量字符串就是放在这里的程序结束后由系统释放
5、程序代码区:存放函数体的二进制代码。
-----------------------------------------------------------------------------------------------------------------
总结
从以上分析可知, 静态存储变量是一直存在的, 而动态存储变量则时而存在时而消失。我们又把这种由于变量存储方式不同而产生的特性称变量的生存期。
生存期表示了变量存在的时间。 生存期和作用域是从时间和空间这两个不同的角度来描述变量的特性,这两者既有联系,又有区别。 一个变量究竟属于哪一种存储方式, 并不能仅从其作用域来判断,还应有明确的存储类型说明。
内存中用户存储空间的分配情况(三种):
程序区:存放程序语句
静态存储区:全局变量,局部静态变量
存放全局变量,在程序开始执行时给全局变量分配存储区,程序执行完毕就释放。
动态存储区:函数形参变量(在调用函数时给形参分配存储空间),局部动态变量(auto register),函数调用现场保护和返回地址等。
-----------------------------------------------------------------------------------------------------------------
二.堆和栈的区别
1.申请方式
(1)栈(satck):由系统自动分配。
1)程序运行时由编译器自动分配的一块连续的内容,存放函数的参数值,局部变量的值等。
例如,声明在函数中一个局部变量int b;系统自动在栈中为b开辟空间。
2)程序结束时由编译器自动释放
3) 栈由系统自动分配,程序员无法控制
4)只要栈的剩余空间大于所申请空间,系统将为程序提供内存,否则将报异常提示栈溢出。
5)存取方式,先进后出
(2)堆(heap):
1)在内存开辟另一块不连续的存储区域。一般由程序员分配释放,
2)若程序员不释放,程序结束时由系统回收
3)首先应该知道操作系统有一个记录空闲内存地址的链表,当系统收到程序的申请时,会遍历该链表,寻找第一个空间大于所申请空间的堆结点,然后将该结点从空闲结点链表中删除,并将该结点的空间分配给程序。
需程序员自己申请(调用malloc,realloc,calloc),并指明大小,并由程序员进行释放。容易产生memory leak.eg:
-
char p;
-
p = (char *)malloc(sizeof(char));
但是,p本身是在栈中。
----------------------------------------
在c中malloc函数
如p1 = (char *)malloc(10);
在C++中用new运算符
如p2 = (char *)malloc(10);
但是注意p1、p2本身是在栈中的。
2.申请大小的限制
(1)栈:在windows下栈是向底地址扩展的数据结构,是一块连续的内存区域(它的生长方向与内存的生长方向相反)。这句话的意思是栈顶的地址和栈的最大容量是系统预先规定好的,在 WINDOWS下,栈的大小是2M(也有的说是1M,总之是一个编译时就确定的常数)。
栈的大小是固定的。如果申请的空间超过栈的剩余空间时,将提示overflow。因此,能从栈获得的空间较小。
(2)堆:堆是高地址扩展的数据结构(它的生长方向与内存的生长方向相同),是不连续的内存区域。这是由于系统使用链表来存储空闲内存地址的,自然是不连续的,而链表的遍历方向是由底地址向高地址。堆的大小受限于计算机系统中有效的虚拟内存。由此可见,堆获得的空间比较灵活,也比较大。
3.系统响应:
(1)栈:只要栈的空间大于所申请空间,系统将为程序提供内存,否则将报异常提示栈溢出。
(2)堆:首先应该知道操作系统有一个记录空闲内存地址的链表,但系统收到程序的申请时,会遍历该链表,寻找第一个空间大于所申请空间的堆结点,然后将该结点从空闲链表中删除,并将该结点的空间分配给程序,另外,对于大多数系统,会在这块内存空间中的首地址处记录本次分配的大小,这样,代码中的free语句才能正确的释放本内存空间。另外,找到的堆结点的大小不一定正好等于申请的大小,系统会自动的将多余的那部分重新放入空闲链表中。
说明:
(1)对于堆来讲,频繁的new/delete势必会造成内存空间的不连续,从而造成大量的碎片,使程序效率降低。
(2)对于栈来讲,则不会存在这个问题,
4.申请效率的比较
(1)栈由系统自动分配,速度快。但程序员是无法控制的
(2)堆是由malloc分配的内存,一般速度比较慢,而且容易产生碎片,不过用起来最方便。
另外,在WINDOWS下,最好的方式是用VirtualAlloc分配内存,他不是在堆,也不是在栈,是直接在进程的地址空间中保留一块内存,虽然用起来最不方便。但是速度快,也最灵活。
5.堆和栈中的存储内容
(1)栈:在函数调用时,第一个进栈的主函数中后的下一条语句的地址,然后是函数的各个参数,参数是从右往左入栈的,然后是函数中的局部变量。注:静态变量是不入栈的。当本次函数调用结束后,局部变量先出栈,然后是参数,最后栈顶指针指向最开始存的地址,也就是主函数中的下一条指令,程序由该点继续执行。
(2)堆:一般是在堆的头部用一个字节存放堆的大小。堆中的具体内容有程序员安排。
6.存取效率的比较
(1)堆:char *s1=”hellow tigerjibo”;hellow tigerjibo是在编译是就确定的。
(2)栈:char s1[]=”hellow tigerjibo”;hellow tigerjibo是在运行时赋值的;
用数组比用指针速度更快一些,指针在底层汇编中需要用edx寄存器中转一下,而数组在栈上读取。
栈在读取时直接就把字符串中的元素读到寄存器cl中,而堆则要先把指针值读到edx中,在根据edx读取字符,显然慢了。
补充:
栈是机器系统提供的数据结构,计算机会在底层对栈提供支持:分配专门的寄存器存放栈的地址,压栈出栈都有专门的指令执行,这就决定了栈的效率比较高。
堆则是C/C++函数库提供的,它的机制是很复杂的,例如为了分配一块内存,库函数会按照一定的算法(具体的算法可以参考数据结构/操作系统)在堆内存中搜索可用的足够大小的空间,如果没有足够大小的空间(可能是由于内存碎片太多),就有可能调用系统功能去增加程序数据段的内存空间,这样就有机会分到足够大小的内存,然后进行返回。显然,堆的效率比栈要低得多。
7.分配方式:
(1)堆都是动态分配的,没有静态分配的堆。
(2)栈有两种分配方式:静态分配和动态分配。静态分配是编译器完成的,比如局部变量的分配。动态分配由alloca函数进行分配,但是栈的动态分配和堆是不同的。它的动态分配是由编译器进行释放,无需手工实现。
------------------------------------------------------------------------------------------------------------------
堆和栈的区别可以用如下的比喻来看出:
使用栈就象我们去饭馆里吃饭,只管点菜(发出申请)、付钱、和吃(使用),吃饱了就走,不必理会切菜、洗菜等准备工作和洗碗、刷锅等扫尾工作,他的好处是快捷,但是自由度小。
使用堆就象是自己动手做喜欢吃的菜肴,比较麻烦,但是比较符合自己的口味,而且自由度大。
------------------------------------------------------------------------------------------------------------------
堆和栈的区别主要分:
操作系统方面的堆和栈,如上面说的那些,不多说了。
还有就是数据结构方面的堆和栈,这些都是不同的概念。这里的堆实际上指的就是(满足堆性质的)优先队列的一种数据结构,第1个元素有最高的优先权;栈实际上就是满足先进后出的性质的数学或数据结构。虽然堆栈,堆栈的说法是连起来叫,但是他们还是有很大区别的,连着叫只是由于历史的原因。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)