注意:食用本篇博客的前提是你已经安装好了Git,并且也有一定的Git基础。因为有些git中比较常用的功能我会略过。
第一步:配置Git环境变量
右键“我的电脑”,选择“属性”,在弹出的对话框左侧点击“高级系统设置”,点击“环境变量”,编辑用户变量里的Path变量:
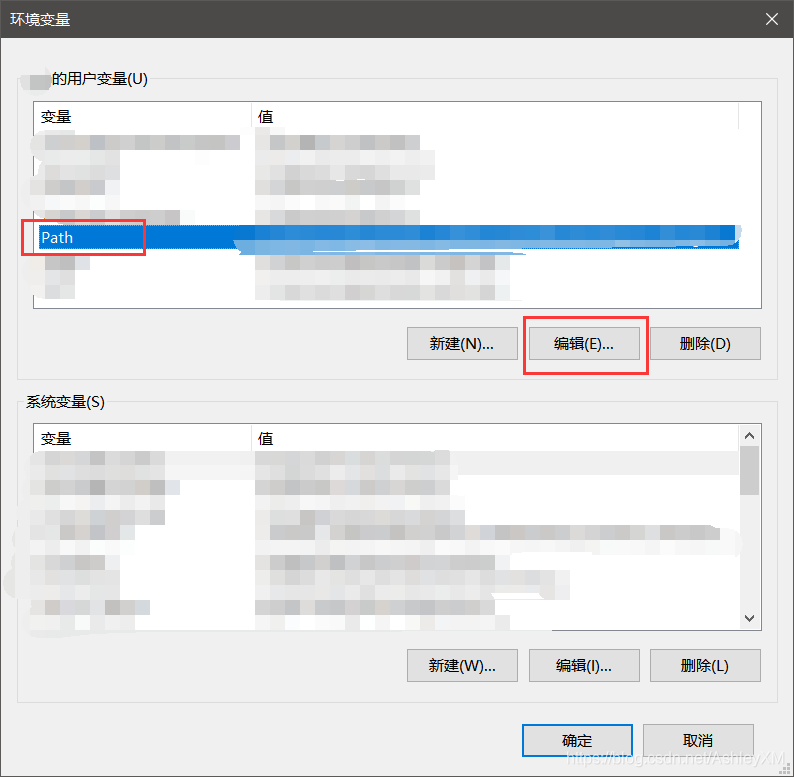
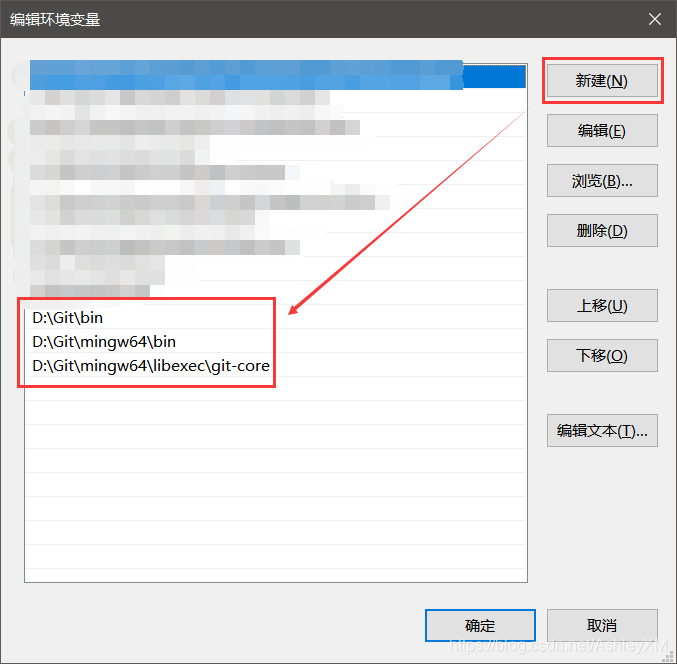
新建如下三个值,具体值根据自己下载git的路径来设置:
(下图的Git是我下载git的根目录)
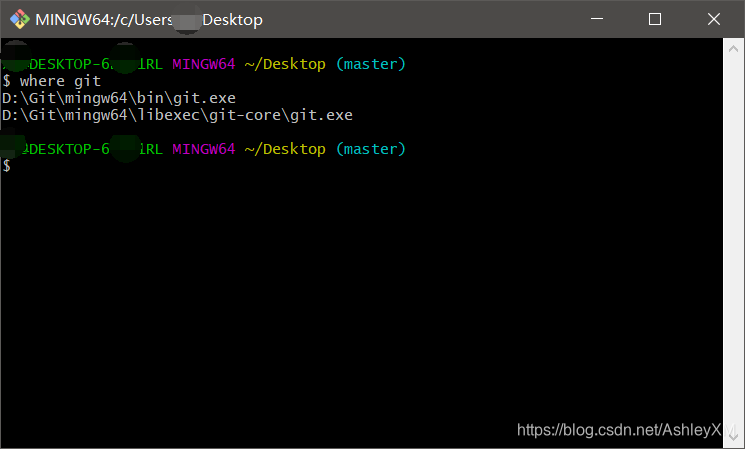
如果不知道git的安装路径可以在git bash命令行中输入where git来查看git安装路径:
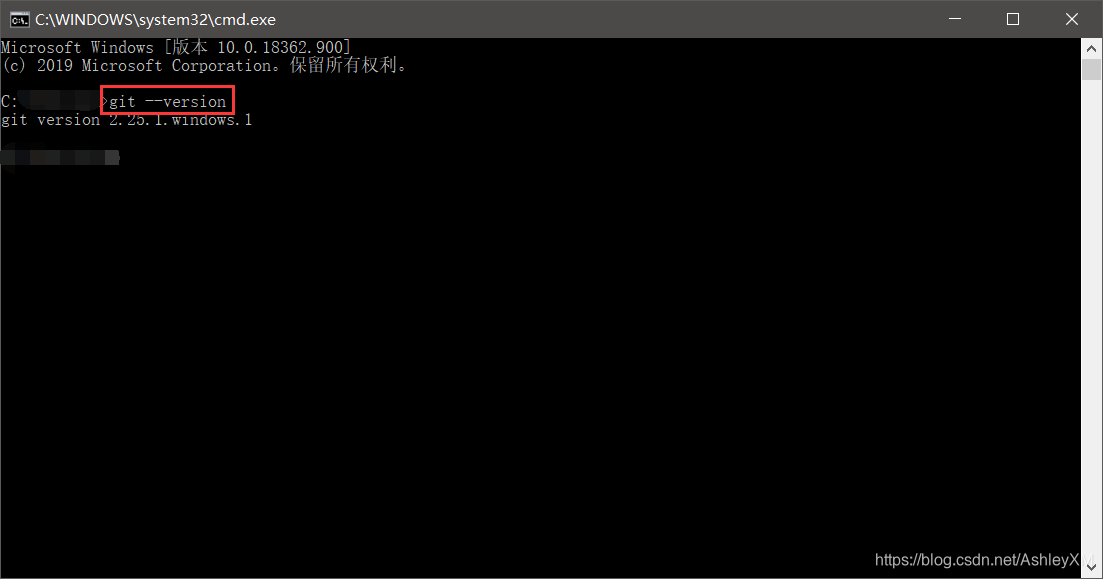
第二步:确认配置生效
在命令行中输入git --version,如果能显示git的版本则证明生效。
第三步:修改VScode的配置
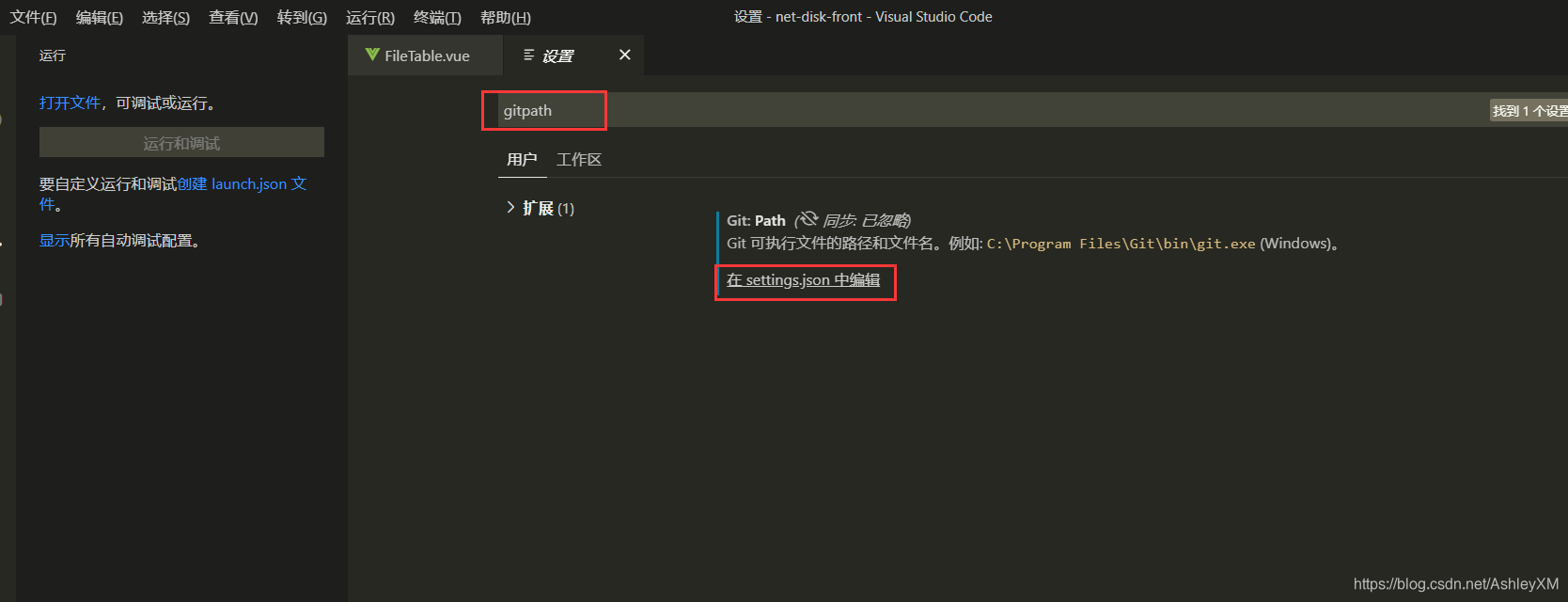
菜单栏的“文件”->“首选项”->“设置”,在输入框输入gitpath,点击“在settings.json中编辑”。
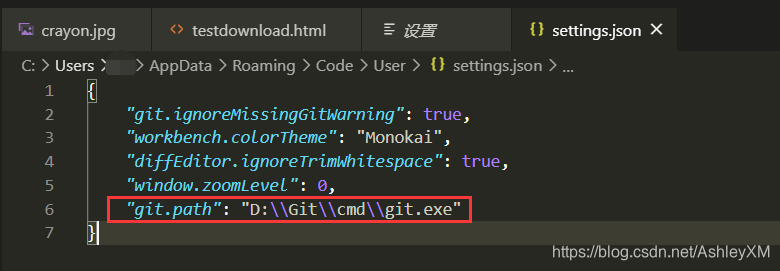
如下,把git.path的值改为git.exe的实际位置(根据实际情况来配置)并保存:
第四步:重启VScode
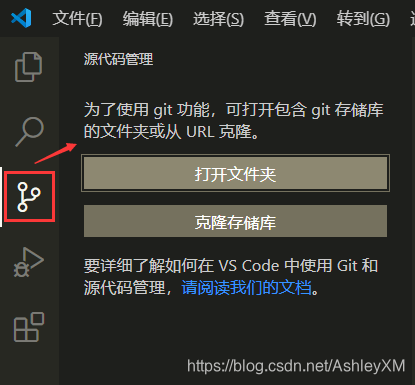
第五步:选择“打开文件夹”或“克隆存储库”
打开文件夹 -> 打开在git bash里使用git clone命令得到的文件夹
克隆存储库 -> 提供克隆的仓库地址即可
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)