在XTDrone安装完成后,运行一个键盘控制无人机程序测试XTDrone安装是否存在问题。通过分析该例程,理解ROS对无人机的控制方法与控制过程。
XTDrone键盘控制无人机例程仿真
XTDrone键盘控制无人机例程
CSDN学习与转载
仿真
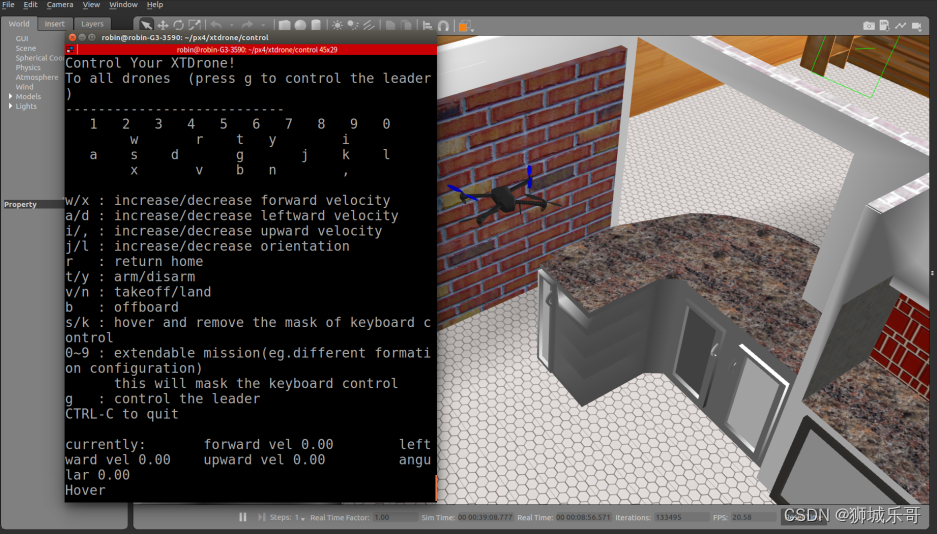
用键盘控制无人机飞行
在一个终端运行(启动gazebo,出现了场景和飞机)
cd ~/PX4_Firmware
roslaunch px4 indoor1.launch
Gazebo启动后,在另一个终端运行(启动通信脚本,iris代表子机型,0代表飞机的编号,与0号iris建立通信)
cd ~/XTDrone/communication/
python multirotor_communication.py iris 0
与0号iris建立通信后,在另一个终端运行(启动键盘控制脚本,iris代表机型,1代表飞机的个数,vel代表速度控制)
cd ~/XTDrone/control/keyboard
python multirotor_keyboard_control.py iris 1 vel
便可以通过键盘控制1架iris的解锁/上锁(arm/disarm),修改飞行模式,飞机速度等。使用v起飞利用的是takeoff飞行模式,相关参数(起飞速度、高度)要在rcS中设置。一般可以使用offboard模式起飞,这时起飞速度要大于0.3m/s才能起飞(即:upward velocity 需要大于0.3)。注意,飞机要先解锁才能起飞!飞到一定高度后可以切换为‘hover’模式悬停,再运行自己的飞行脚本,或利用键盘控制飞机。
推荐起飞流程,按i把向上速度加到0.3以上,再按b切offboard模式,最后按t解锁。
程序
这里打开了三个终端,分别打开了
/XTDrone/sitl_config/launch/indoor1.launch
/XTDrone/communication/multirotor_communication.py
/XTDrone/control/keyboardmultirotor_keyboard_control.py
以下三篇对程序进行分析
indoor1.launch
multirotor_communication.py
keyboardmultirotor_keyboard_control.py
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)