XTDrone等无人机仿真平台,利用ROS+Gazbo+PX4进行SITL(软件在环仿真),主要利用PX4飞控的offboard模式,在此模式下上位机程序发布期望运动,底层控制器追踪此期望运动。ROS与PX4通讯关系如下图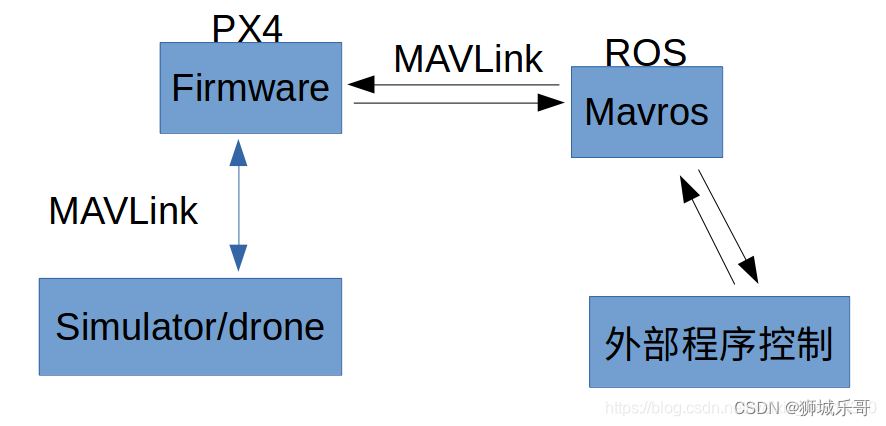 若需要进行上层开发则在ROS中编写代码,订阅或发布MAVRos话题,从而订阅无人机的状态,及发布无人机的期望位置或期望速度,px4飞控追踪此期望运动。因此无论上层控制程序多么复杂,最后都是分解成为控制无人机的位置,速度或姿态等,通过mavros发布给飞控进行跟踪。若进行底层飞控的开发,需研读px4开发手册,修改px4代码。其中MAVRos与MAVLink不需修改。因此学习MAVRos是ROS控制无人机需要首先学习的。
若需要进行上层开发则在ROS中编写代码,订阅或发布MAVRos话题,从而订阅无人机的状态,及发布无人机的期望位置或期望速度,px4飞控追踪此期望运动。因此无论上层控制程序多么复杂,最后都是分解成为控制无人机的位置,速度或姿态等,通过mavros发布给飞控进行跟踪。若进行底层飞控的开发,需研读px4开发手册,修改px4代码。其中MAVRos与MAVLink不需修改。因此学习MAVRos是ROS控制无人机需要首先学习的。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)