由于jetson nano开发板完全依靠自带的静态散热在运行程序时通过jtop查看GPU、CPU等组件温度均超过70℃,所以添加一个5v散热风扇。(tegrastats也可以用来查看系统状态)
tegrastats的参考这篇官方文档:
https://docs.nvidia.com/jetson/l4t/index.html#page/Tegra%2520Linux%2520Driver%2520Package%2520Development%2520Guide%2FAppendixTegraStats.html%23
安装:
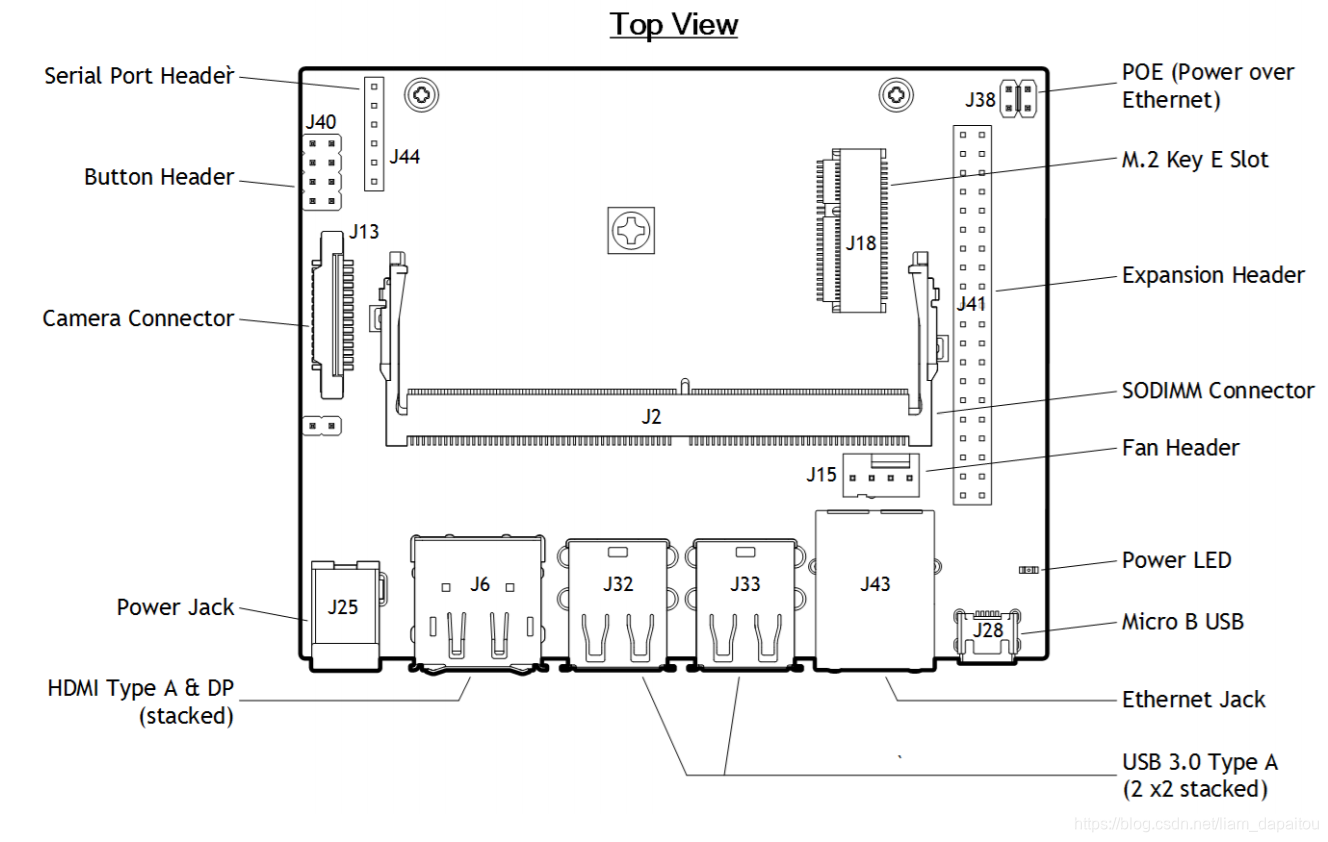
上图截自《Jetson Nano Developer Kit》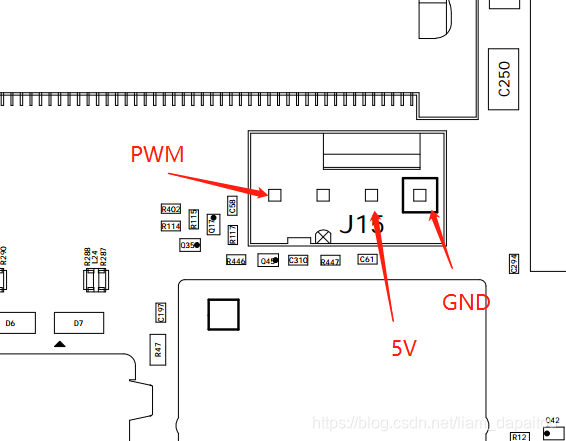
风扇接线如上图所示。
安装好后,参考:https://devtalk.nvidia.com/default/topic/1049521/jetson-nano-fan/
(2019.01.08修改:以下转速控制说法不准确,jetson nano 有自己的芯片温度与风扇转速对应的曲线,开机时温度未达到旋转阈值所以不会旋转,通过修改/sys/devices/pwm-fan/target_pwm可以临时改变目标转速,但当温度变化后仍然按照nano设定温度曲线调速。如果需要强制固定转速,可以用python每隔几秒修改一次target_pwm。0~255对应转速 0%~100%,详细信息参考Thermal Management 以及 nano adaptation guide 两篇官方文档)
控制风扇开关:
ON :
sudo sh -c ‘echo 255 > /sys/devices/pwm-fan/target_pwm’
OFF :
sudo sh -c ‘echo 0 > /sys/devices/pwm-fan/target_pwm’
(slowly turned off)
重启以后风扇是不转的,所以需要设置开机运行
$ sudo sh -c 'echo 255 > /sys/devices/pwm-fan/target_pwm'
- 创建/etc/rc.local(18.04没有rc.local),并添加如下内容:
#!/bin/bash
sleep 10
sudo /usr/bin/jetson_clocks
sudo sh -c 'echo 255 > /sys/devices/pwm-fan/target_pwm'
- 添加rc.local可执行权限
$ sudo chmod 755 /etc/rc.local
- 重启即可
$ sudo reboot
0823修订:
使用 jetson_clocks 命令可以启动风扇
sudo jetson_clocks
运行后 /sys/devices/pwm-fan/target_pwm 会被设置为255
cat /sys/devices/pwm-fan/target_pwm
待续。
更多风扇设置的相关信息参阅《NVIDIA Tegra Linux Driver Package》Thermal Management以及之后的章节:
https://docs.nvidia.com/jetson/l4t/index.html#page/Tegra%2520Linux%2520Driver%2520Package%2520Development%2520Guide%2Fpower_management_nano.html%23wwpID0E0SH0HA
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)