文章目录
- 参考文献
- 简介
- Bug1算法
- Bug2算法
- Tangent Bug算法
-
- 总结
参考文献
自动驾驶决策规划算法 - Bug Algorithms Bug算法
Robotic Motion Planning: Tangent Bug and Sensors
Introduction to Robotics Bug Algorithms
Bug Algorithms autorob.org
Principles of Robot Motion
Bug updated - annotated.pptx
简介
本文所有图片均来自以下这本书:
Principles of Robot Motion: Theory, Algorithms, and Implementations[M]. MIT Press, 2005.
BUG算法(Bug Algorithms)是一种最简单的避障算法。其算法原理类似昆虫爬行的运动决策策略。在未遇到障碍物时,沿直线向目标运动;在遇到障碍物后,沿着障碍物边界绕行,并利用一定的判断准则离开障碍物继续直行。这种应激式的算法计算简便,不需要获知全局地图和障碍物形状,具备完备性。但是其生成的路径平滑性不够好,对机器人的各种微分约束适应性比较差。
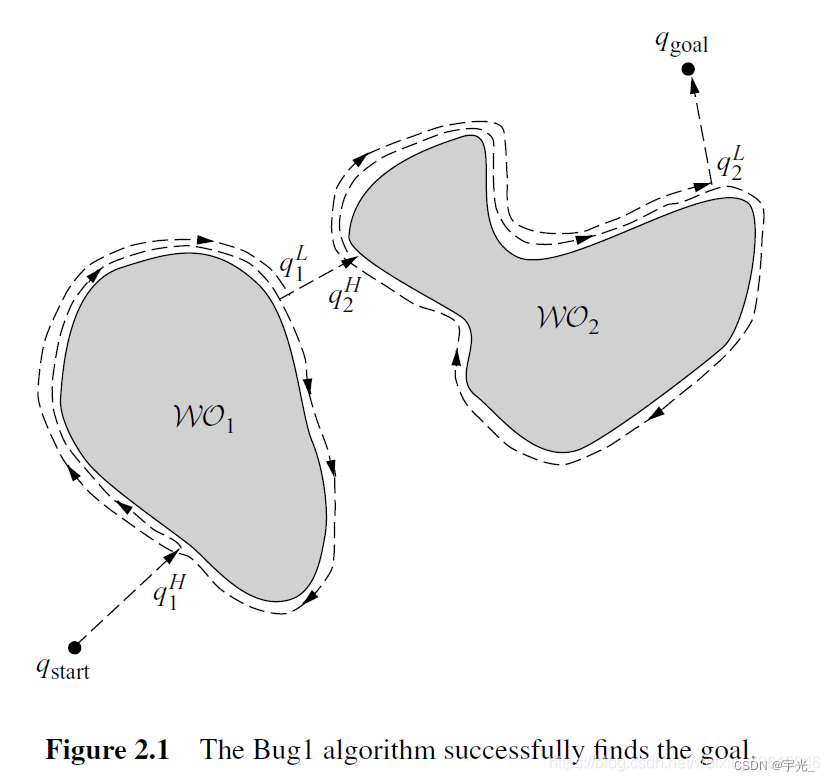
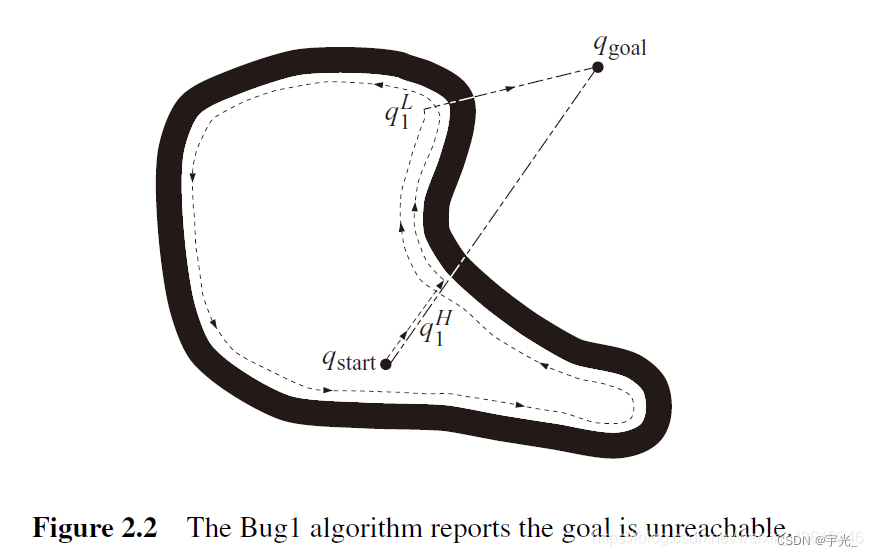
Bug1算法
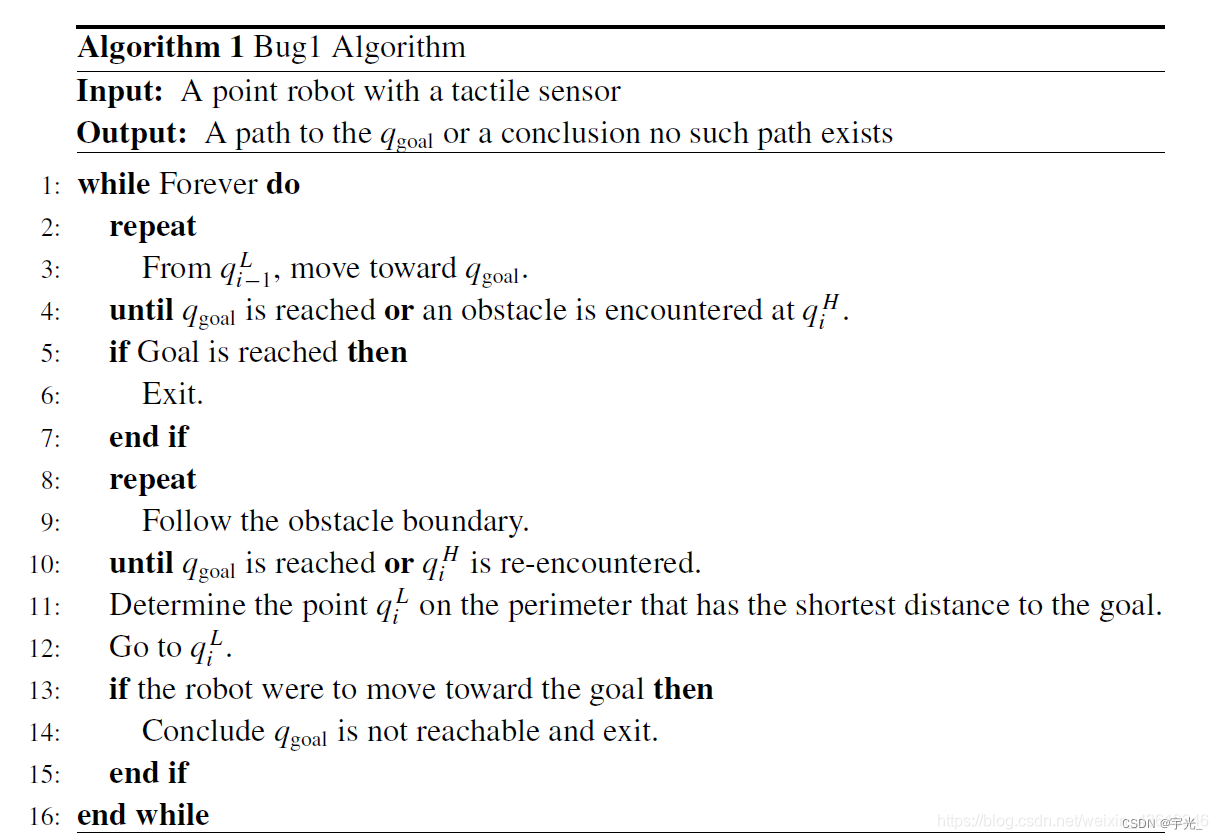
该算法的基本思想是在没有障碍物时,沿着直线向目标运动可以得到最短的路线。当传感器检测到障碍物时,机器人绕行障碍物直到能够继续沿直线向目标运动。BUG1算法只有两个行为:向目标直行和绕着障碍物的边界走。

Bug2算法

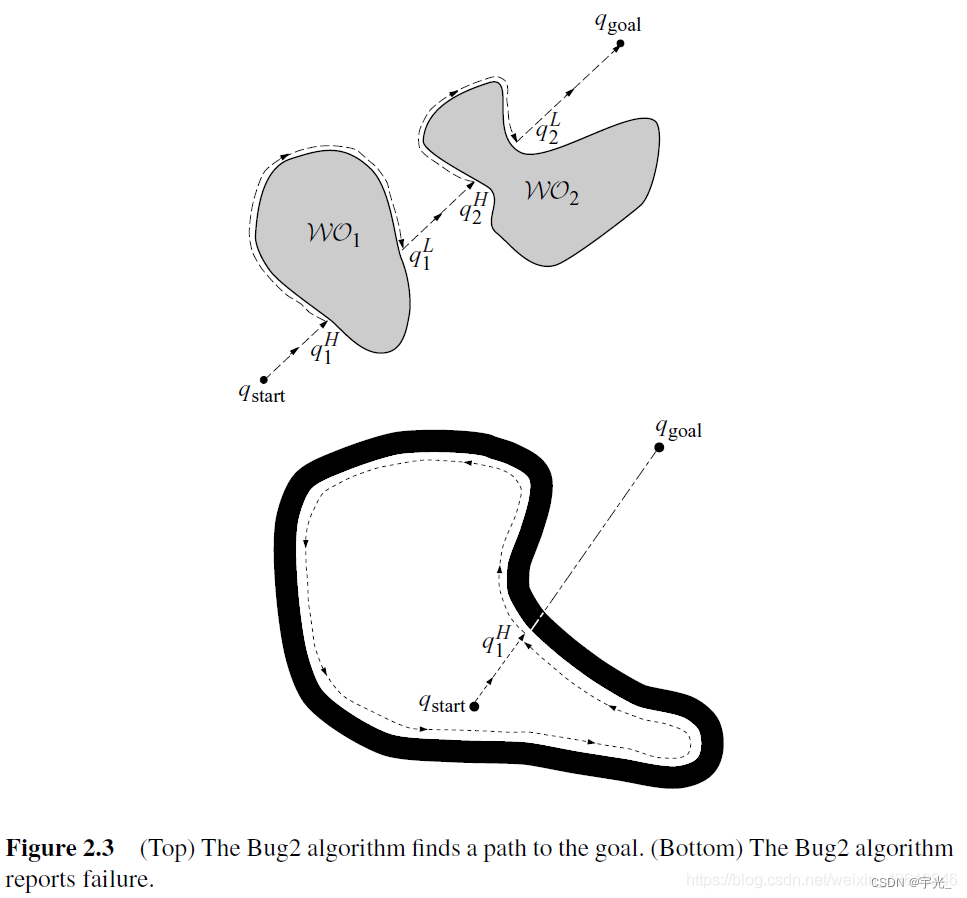
Bug2算法伪代码:
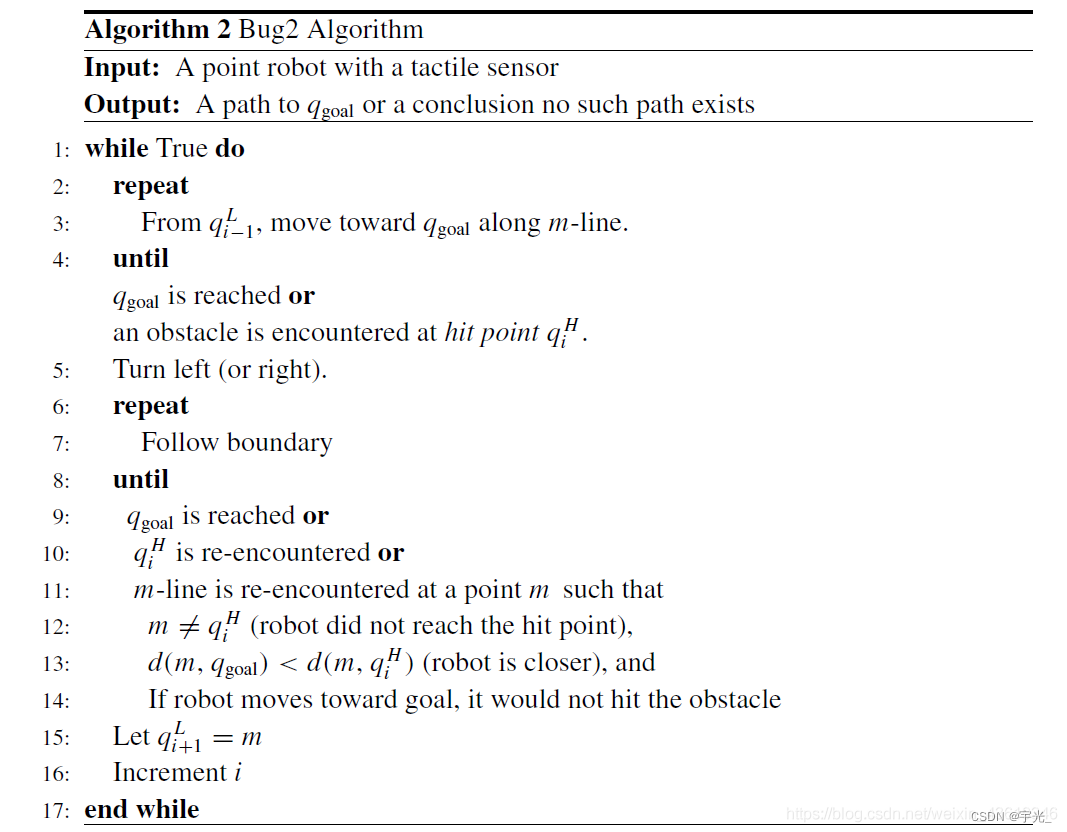
BUG1和BUG2算法提供了搜索问题的两种基本方法:比较保守的BUG1算法进行详细的搜索来获得最佳的离开点。这需要机器人环绕整个障碍物的边界。而BUG2算法使用一种投机的方法。机器人不环绕完整的障碍物,而选择第一个可用的点作为离开点。对于一般的环境,BUG2算法的效率更高;而对于复杂形状的障碍物,保守的BUG1算法性能更优。
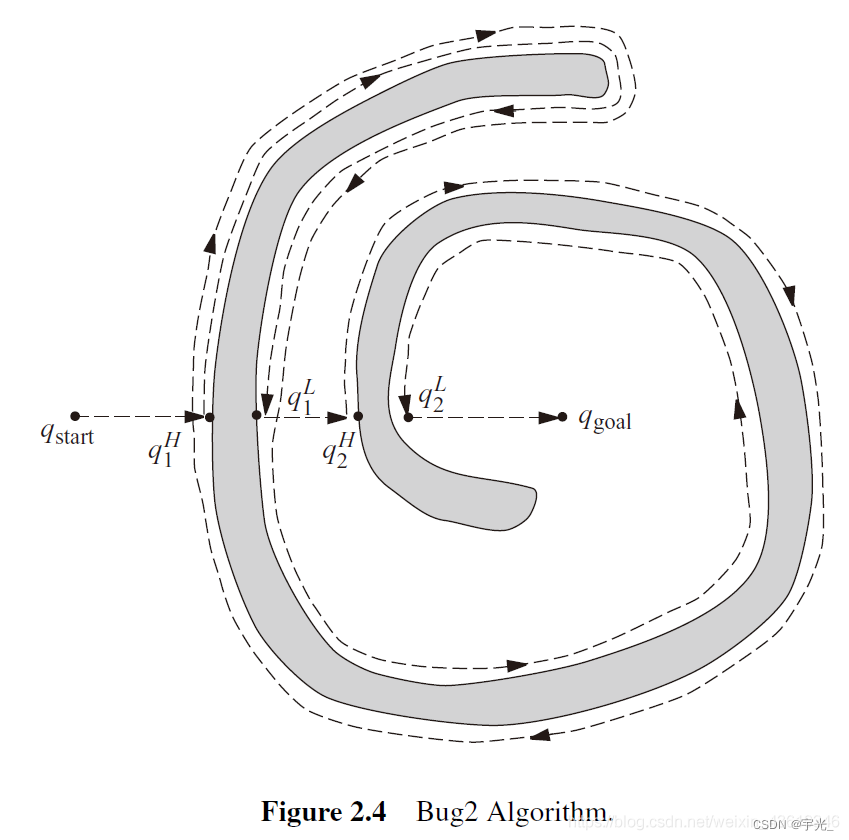
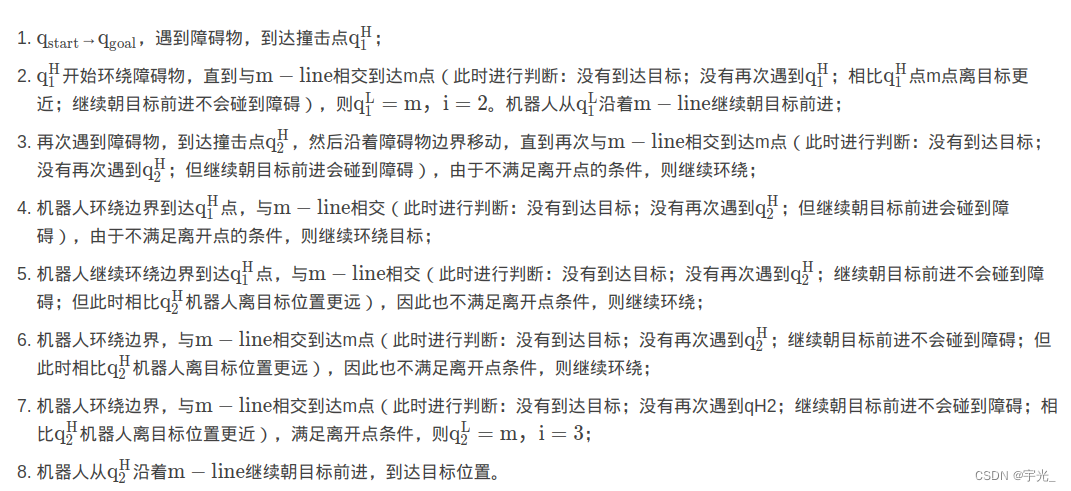
Bug2算法在一般情况下具有很短的移动路径,然而这种策略并非完美。如图2.4所示的螺旋形障碍物,其边界与m-line多次相交,我们可以根据上述Bug2算法的伪代码确定其运动路径:
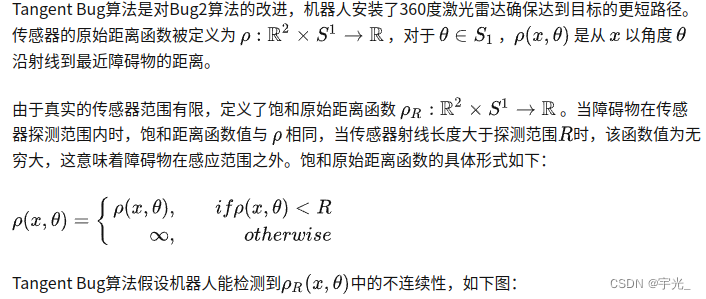
Tangent Bug算法
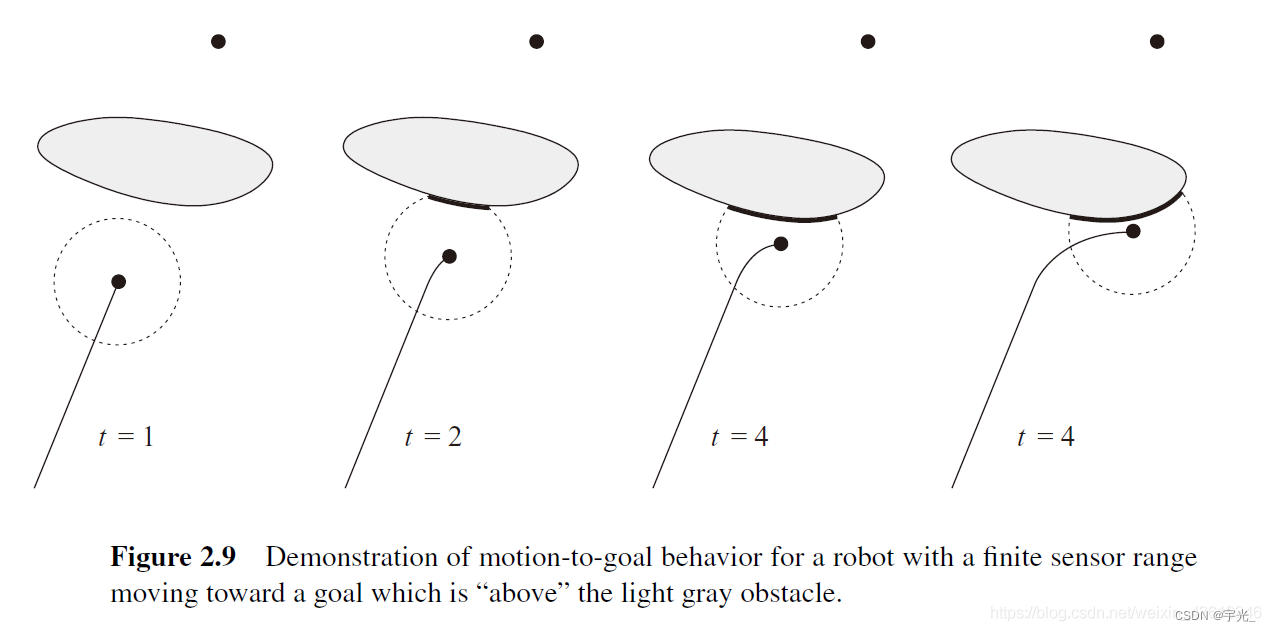
下图中x代表机器人的位置,细线代表发出的光线,粗线代表了光线被遮挡(说明机器人无法到达这些位置)。
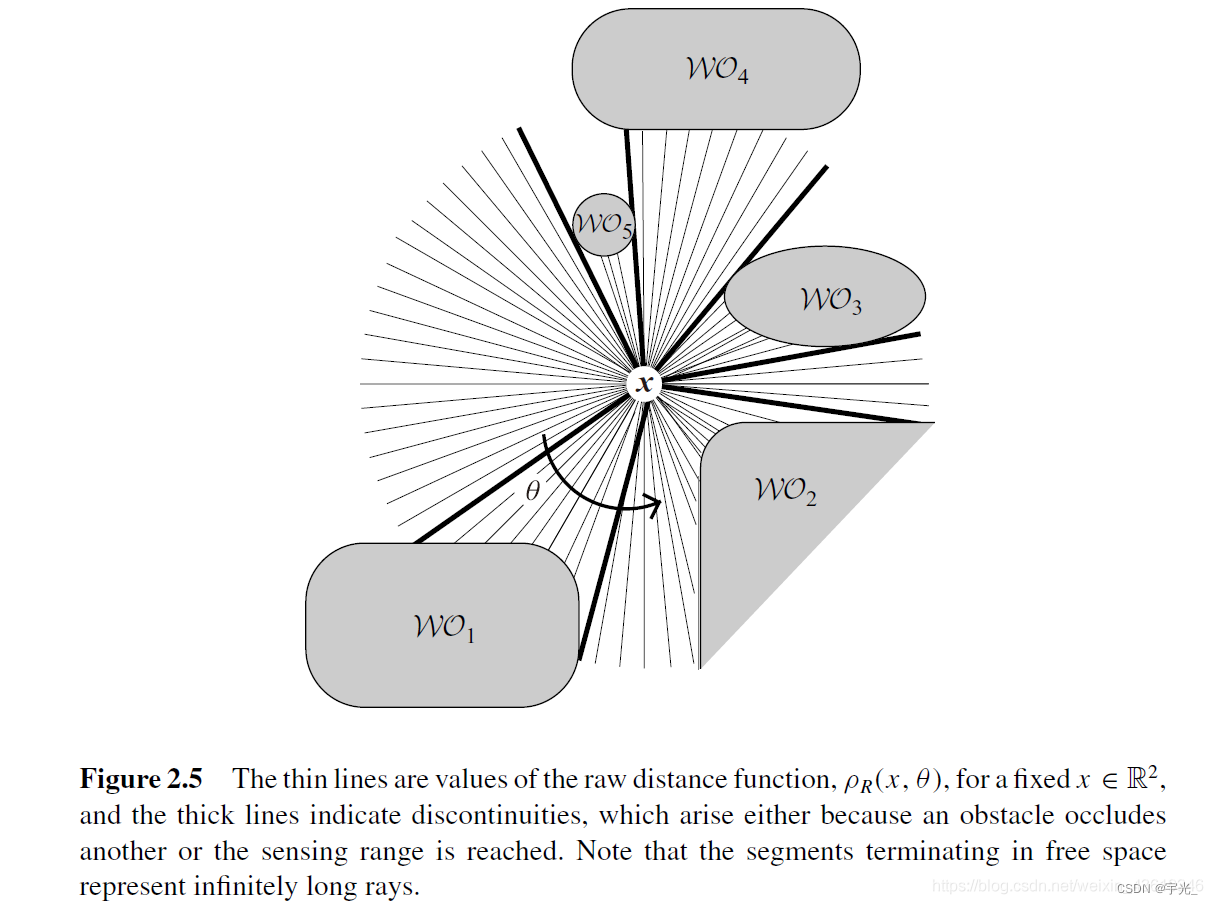

我们用
O
i
O_i
Oi标记光线与障碍物相交的边界点:
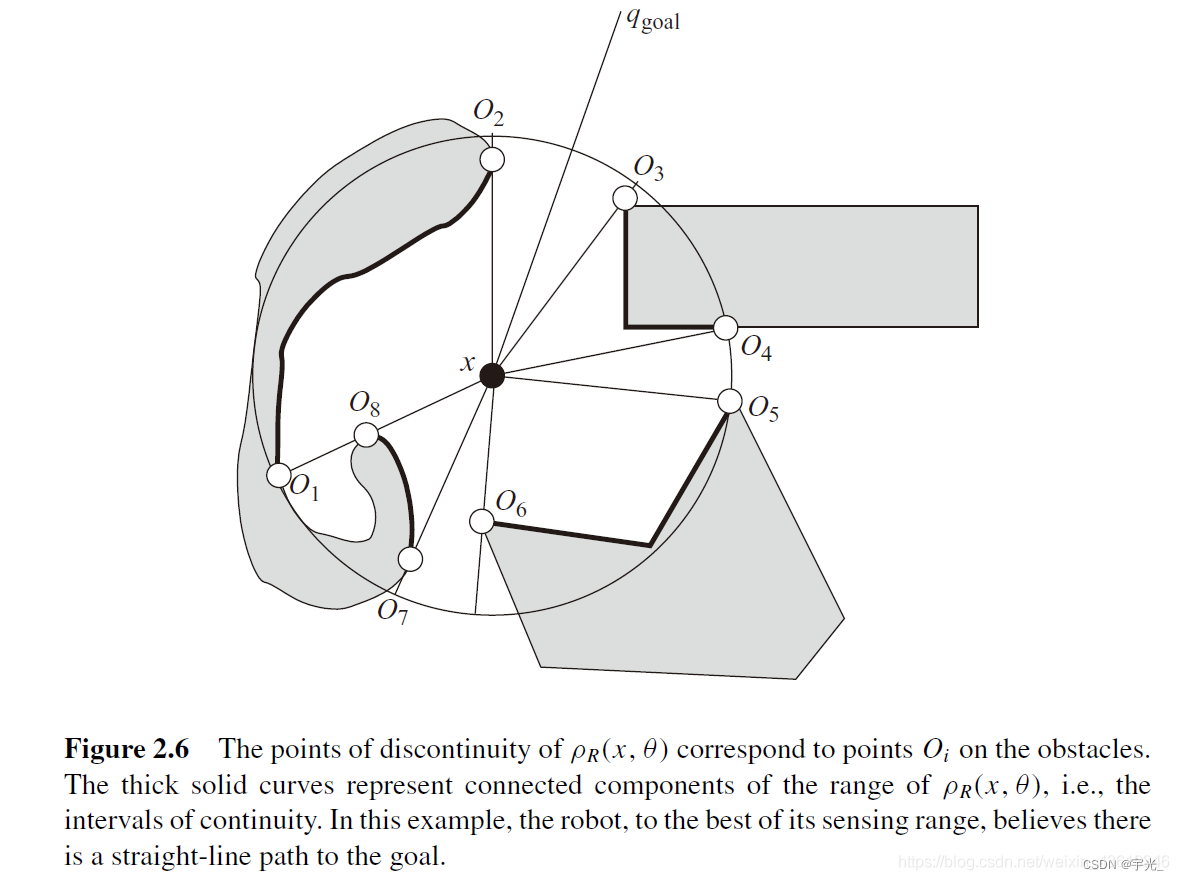

关于O_i的选择

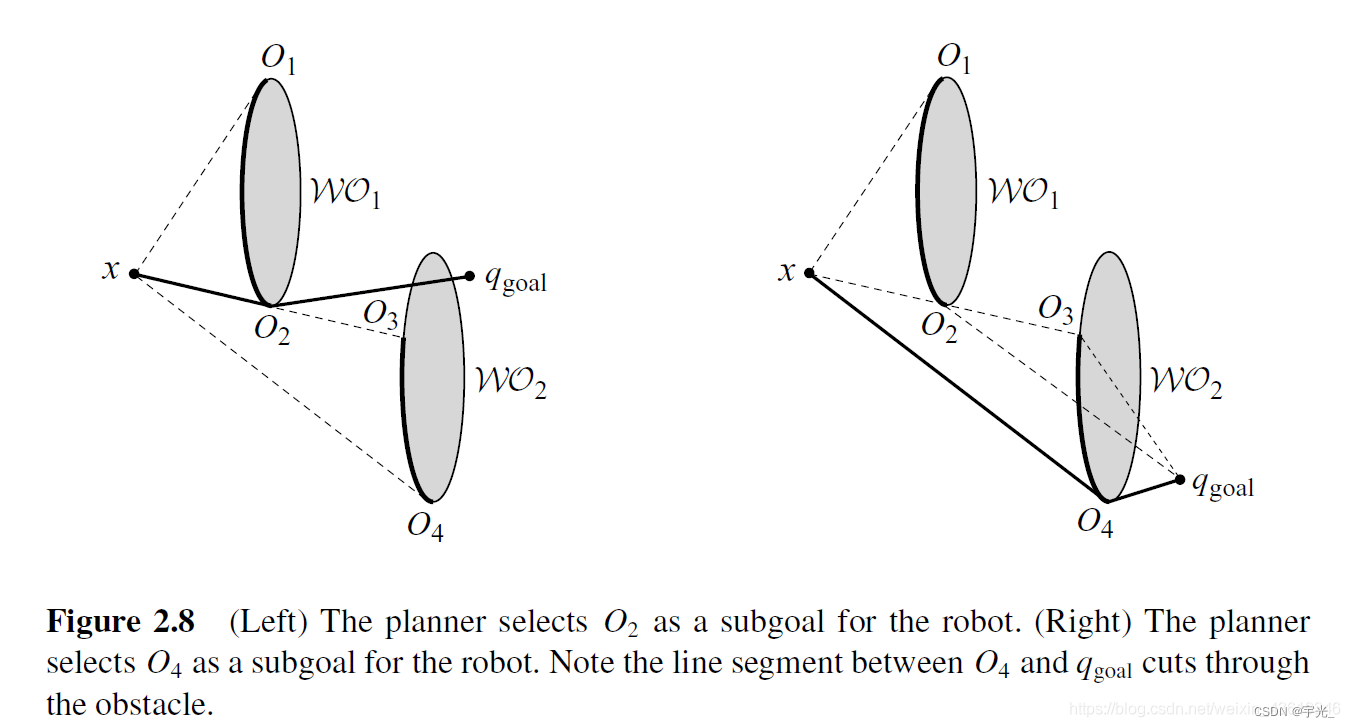

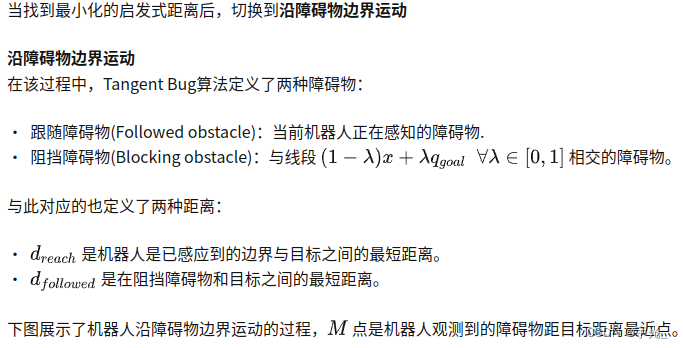
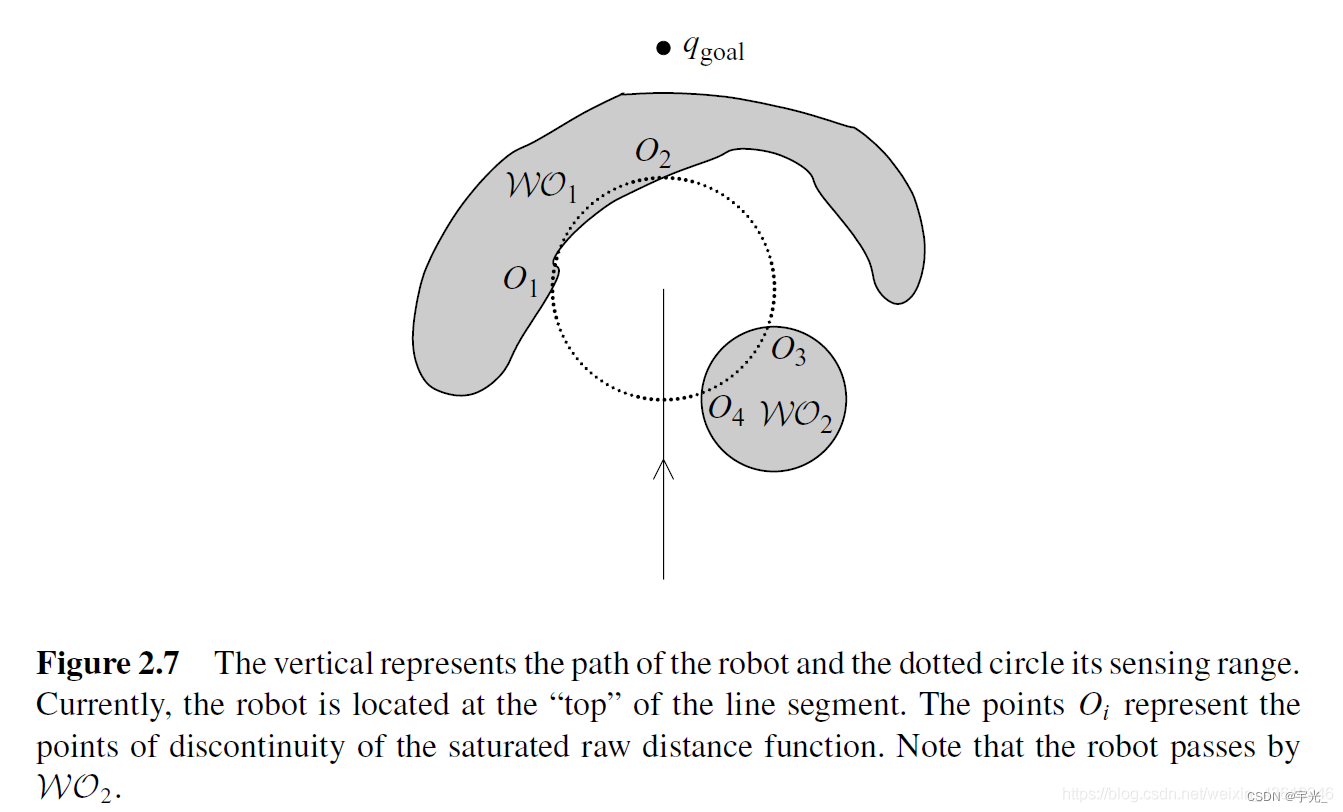
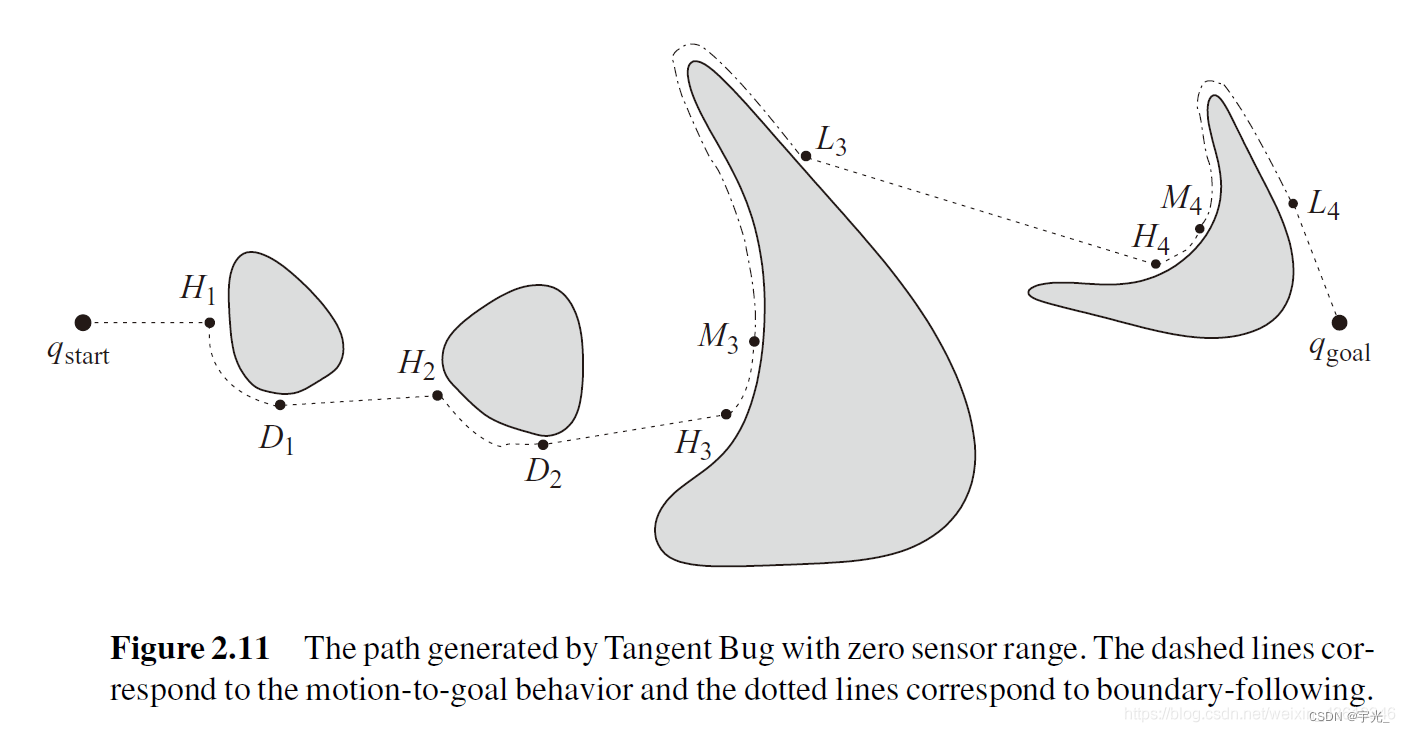
如上图所示,当机器人探索到障碍物上的 M点后,探索距离就不再减小,即 M点是机器人探索距离在障碍物边界上的局部极小点。机器人开始沿着障碍物边界进行环绕,图中虚线路径就是机器人环绕障碍物时所走的路径。当机器人探测到与目标距离相比 M MM点更近的点时,重新开始接近目标的运动。

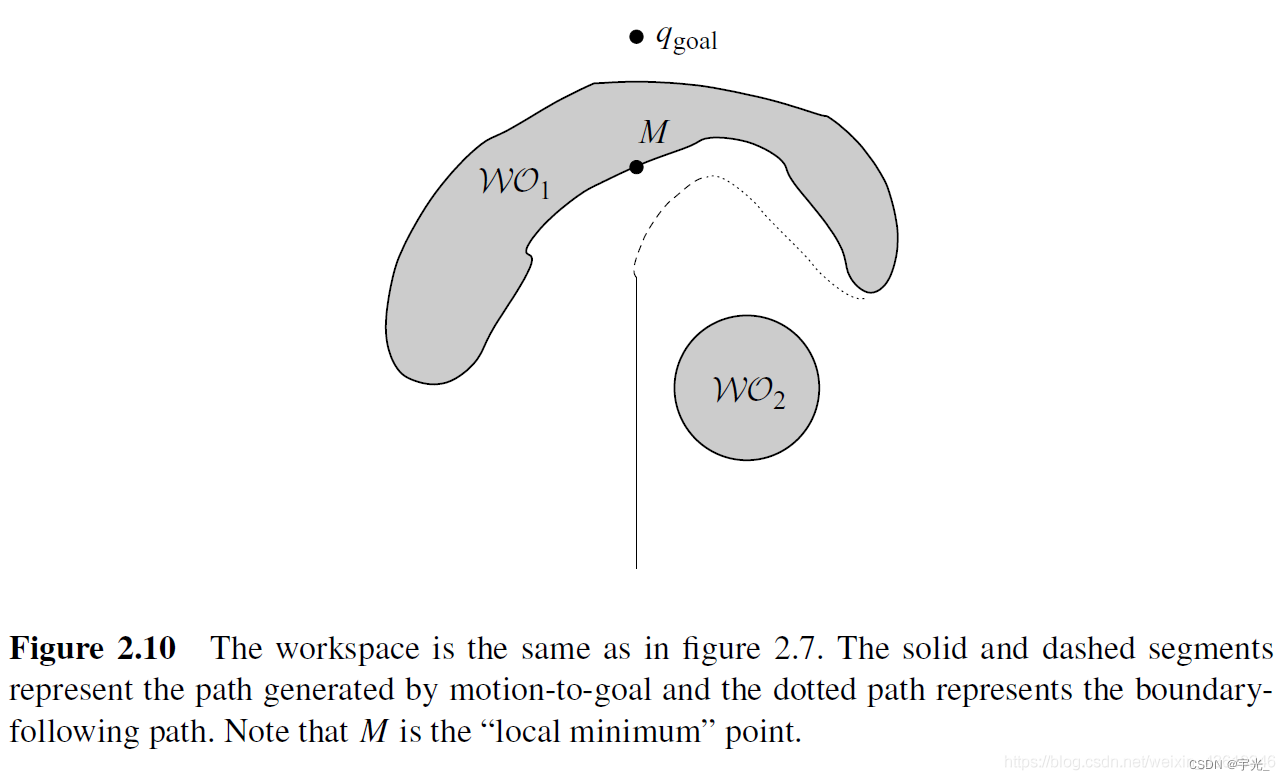
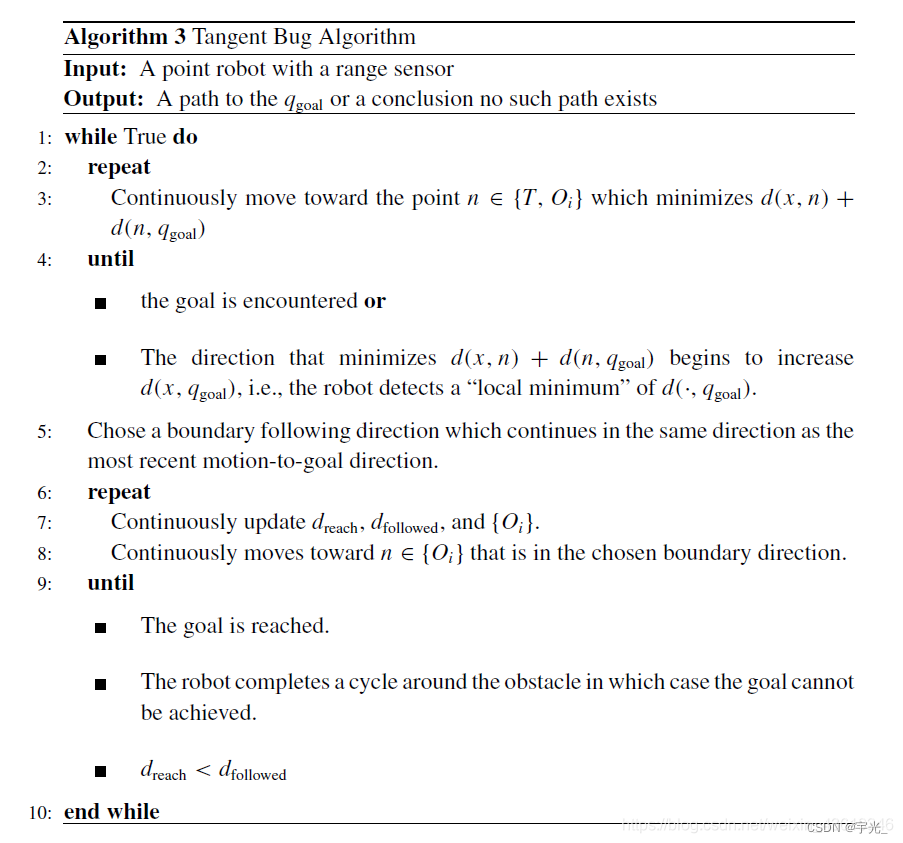
Tangent Bug算法伪代码如下:
激光雷达半径对算法的影响
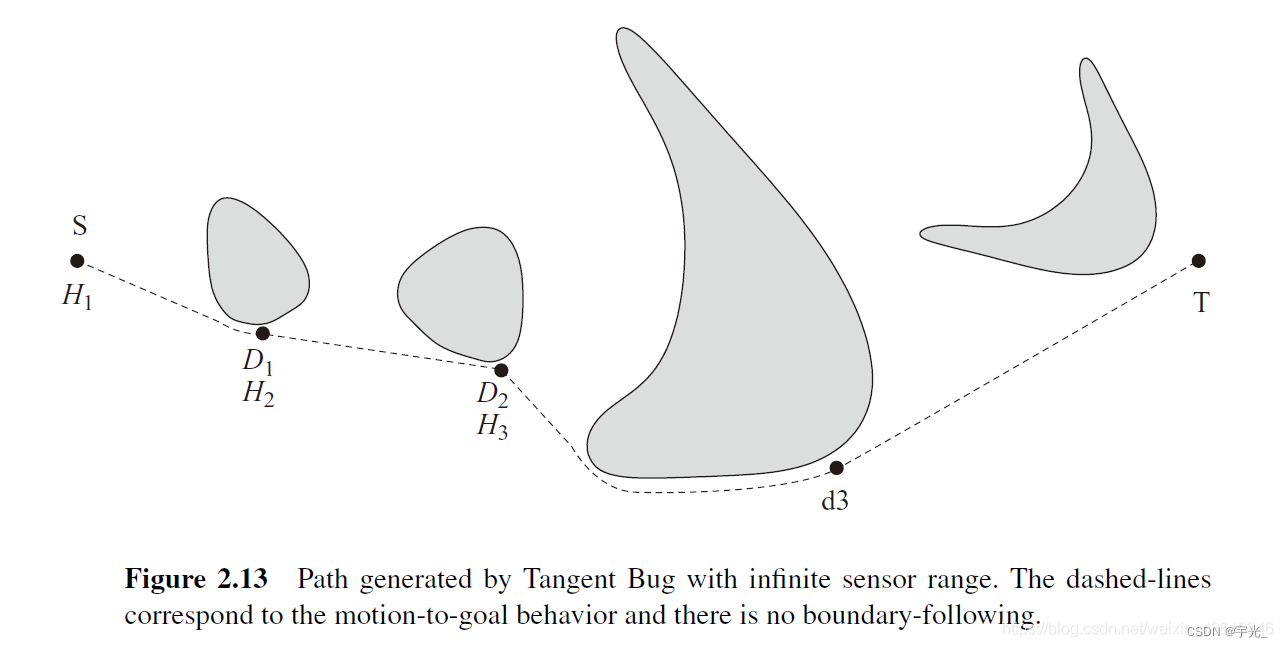
使用Tanget Bug可以有效的提升整体效率,这是激光雷达测量半径为
R
R
R时形成的轨迹,当测量半径退化为0时(变成了接触传感器),Tangent Bug算法就退化成了Bug2算法:
总结
Bug算法是最早被提出来的路径规划算法,很符合直觉,尤其是在完全一无所知的环境下,Bug算法往往能够取得非常不错的效果!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)