记录一下在工作中遇到的命令,碰到一个就总结一个吧!
uname -i
uname -i 查看linux是多少位的

ps aux
ps aux
ps命令用于查看系统中的进程状态,格式为“ps [参数]”。
参数:
-a 显示所有进程(包括其他用户的进程)
-u 用户以及其他详细信息
-x 显示没有控制终端的进程
Linux系统中时刻运行着许多进程,如果能够合理地管理它们,则可以优化系统的性能。在Linux系统中,有5种常见的进程状态,分别为运行、中断、不可中断、僵死与停止,其各自含义如下所示:
R(运行):进程正在运行或在运行队列中等待。
S(中断):进程处于休眠中,当某个条件形成后或者接收到信号时,则脱离该状态。
D(不可中断):进程不响应系统异步信号,即便用kill命令也不能将其中断。
Z(僵死):进程已经终止,但进程描述符依然存在, 直到父进程调用wait4()系统函数后将进程释放。
T(停止):进程收到停止信号后停止运行。

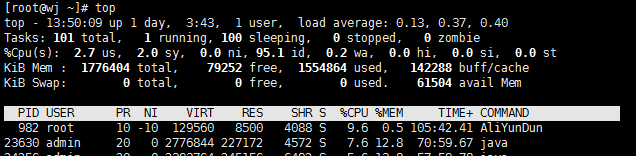
top
top 用于动态地监视进程活动与系统负载等信息
ss
ss 用于显示socket状态
他可以显示PACKET sockets, TCP sockets, UDP sockets, DCCP sockets, RAW sockets, Unix domain sockets等等统计. 它比其他工具展示等多tcp和state信息. 它是一个非常实用、快速、有效的跟踪IP连接和sockets的新工具。
Netstat
Netstat 命令用于显示各种网络相关信息
用到的命令有:
netstat -ntpl 查看监听的端口

ls -al
ls -al 查看Linux下的隐藏文件

hostname
hostname xxx 临时修改主机名称
firewalld常用命令
systemctl start firewalld 启动
systemctl status firewalld 查看状态
systemctl disable firewalld 停止
systemctl stop firewalld 禁用
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)