realsense d435i标定imu与camera
1.标定目的
realsense d435i包含两个红外相机、红外发射器、RGB相机和IMU四个模块,显然四个传感器的空间位置是不同的,我们在处理图像和IMU数据时需要将这些数据都放在统一的坐标系上去。比如我们用d435i运行vins,我们处理的图像和IMU数据都需要放在同一个坐标系下,因此我们需要标定IMU相对RGB相机的空间位置(包括旋转和位移)。另外,相机固有参数比如焦距、畸变参数等以及IMU的零偏和scale系数等都需要提前知道。前者我们称为外参,后者称为内参,在运行程序前我们需要标定它们,不论程序是否有自标定功能,毕竟好的初始标定值对于自标定来说也是有利的。
2.标定准备
-
安装realsense-sdk2.0,包括d435i的驱动等,直到可以运行realsense-viewer,可以看到图像和深度图。
-
安装realsense-ros,前提要安装ros-kinetic,这个包可以直接读取d435i的数据流,并发布各个topic,后面标定操作直接订阅相关的topic。
-
安装imu_utils,前提要安装code_utils,这个用于标定IMU的噪音密度和随机游走系数。
在github上下载,并编译,地址:https://github.com/gaowenliang/imu_utils
问题:code_utils-master/src/sumpixel_test.cpp:2:24: fatal error: backward.hpp:No such file or directory
解决:在code_utils下面找到sumpixel_test.cpp,修改#include "backward.hpp"为 #include “code_utils/backward.hpp”,再编译。
-
安装Kalibr。这个软件包可以同时标定多个相机的外参和内参(提供不同的相机的模型),另外可以标定相机和IMU的外参。
3.imu标定
在imu_utils/launch/目录下新建 d435i_imu.launch
#imu topic的名字
#标定的时长min
运行相机
roslaunch realsense2_camera rs_camera.launch
录制imu数据包
rosbag record -O imu_calibration /camera/imu
录制2小时按CTRL+C完成
运行校准程序
roslaunch imu_utils d435i_imu.launch
回放数据包(20倍回放)
rosbag play -r 20 imu_calibration.bag
经过这些标定会生成一个yaml文件和很多txt文件,主要是yaml文件,给出了加速度计和陀螺仪三轴的noise_density和random_walk,同时计算出了平均值,后面IMU+摄像头联合标定的时候需要这些均值。
#根据标定结果修改① imu.yaml,后面会用到,其文件内容为
#Accelerometers
accelerometer_noise_density: 3.6510867135455143e-02 #Noise density (continuous-time)
accelerometer_random_walk: 8.7794225985338419e-04 #Bias random walk
#Gyroscopes
gyroscope_noise_density: 1.1110598103547959e-02 #Noise density (continuous-time)
gyroscope_random_walk: 2.1198529500305598e-04 #Bias random walk
rostopic: /camera/imu #the IMU ROS topic
update_rate: 200.0 #Hz (for discretization of the val
4.相机标定
设置棋盘格参数,保存成yaml文件,(位置随意,在后面引用绝对路径即可,例如kalibr_calibrate_cameras --target ~/d435i_calibration/checkboard.yaml)②,保存好后面会用到。
target_type: ‘checkerboard’ #gridtype
targetCols: 8 #number of internal chessboard corners 注意是内角点数目
targetRows: 11 #number of internal chessboard corners 注意是内角点数目
rowSpacingMeters: 0.03 #size of one chessboard square [m]
colSpacingMeters: 0.03 #size of one chessboard square [m]
录制camera标定数据:rosbag
为了方便查看,先打开可视化窗口:
终端1:roslaunch realsense2_camera rs_camera.launch //打开相机节点
终端2:rviz/,选camera_link,add topic->camera->color->image_raw 打开可视化窗口,固定相机,移动标定板(效果应稍微好一些),或者rqt也可。
将图像频率降低为4HZ,这里可以用throttle方法,不会出错,并发布新的topic,不会修改原topic:
rosrun topic_tools throttle messages /camera/color/image_raw 4.0 /color
利用throttle工具降低录制的RGB图像频率,降至4HZ,新发布的topic名字是/color
rosbag record -O camd435i /color
其中 -O表示可以保存成camera_calibration.bag(设置bag名称),/color 为录制的话题名称。
(ctrl-c结束录制,bag文件会自动保存到录制时命令行所在的目录)
大部分时间应保证目标(标定板)占视野一半以上,尽可能多角度和多位置(上下左右等)甚至到摄像头捕捉图像的边缘,这样移动目标1min左右即可。
kalibr标定单个camera
kalibr_calibrate_cameras --target ~/d435i_calibration/checkboard.yaml --bag ~/camera_calibration.bag --bag-from-to 5 50 --models pinhole-radtan --topics /color --show-extraction
其中–target ~/bagfiles/checkboard.yaml为定位棋盘格yaml参数文件路径;
–bag ~/bagfiles/camd435i.bag为设置录制bag文件路径;
–bag-from-to 5 50表示用5~50s(根据录制数据的质量决定时间的取舍)之间的数据进行计算;
–models pinhole-radtan为相机模型;
–topics /color,bag录制的话题为topics。
完成后会生成③camchain.yaml,保存好后面会用
错误:No module named ceres
解决:https://github.com/ceres-solver/ceres-solver
错误:ImportError: No module named igraph
解决:pip install igraph --user
5.imu和相机共同标定
调用kalibr的算法计算IMU和camera外参
需要准备的文件:
1.imu.yaml:包含imu参数;
2.camchain.yaml: 包含相机的内参、畸变参数的文件,如果是双目的话,还包含两个相机的位置转换矩阵;
3.checkboard.yaml:标定目标板的参;
4…bag:包含有图片信息和IMU数据的ROS包。
我们之前已经获取了①②③,三个文件,只差bag包了。
抓取bag包
官方推荐 camera 20hz,imu 200hz。
rosrun topic_tools throttle messages /camera/color/image_raw 20.0 /color
rosrun topic_tools throttle messages /camera/imu 200.0 /imu
固定标定目标,确保摄像头能够提取特征前提下充分调整d435i的姿势和位置,录制数据包。
rosbag record -O imu_camera_calibration /color /imu
先面对标定目标,然后俯仰、偏航和横滚三个角度分别面向目标运动,然后是前后左右和上下运动,充分运动起来,推荐时间在2min以上。
完成后得到 ④imu_camera_calibration
运行标定
kalibr_calibrate_imu_camera --target ~/d435i_calibration/checkboard.yaml --cam ~/d435i_calibration/camchain.yaml --imu ~/d435i_calibration/imu.yaml --bag ~/d435i_calibration/imu_camera_calibration.bag --bag-from-to 5 45 --show-extraction
注意: --bag-from-to 10 100 选择10-100s之间的数据
-show-extraction 展示特征提取情况
问题:ImportError: No module named scipy.optimize
解决 pip install scipy –user
标定结果
T_ic: (cam0 to imu0):
[[ 0.99960066 0.01259205 -0.02529763 -0.0054386 ]
[-0.01271351 0.99990839 -0.00464588 0.01025557]
[ 0.02523681 0.00496565 0.99966917 0.00876445]
[ 0. 0. 0. 1. ]]
timeshift cam0 to imu0: [s] (t_imu = t_cam + shift)
-0.0451287115686
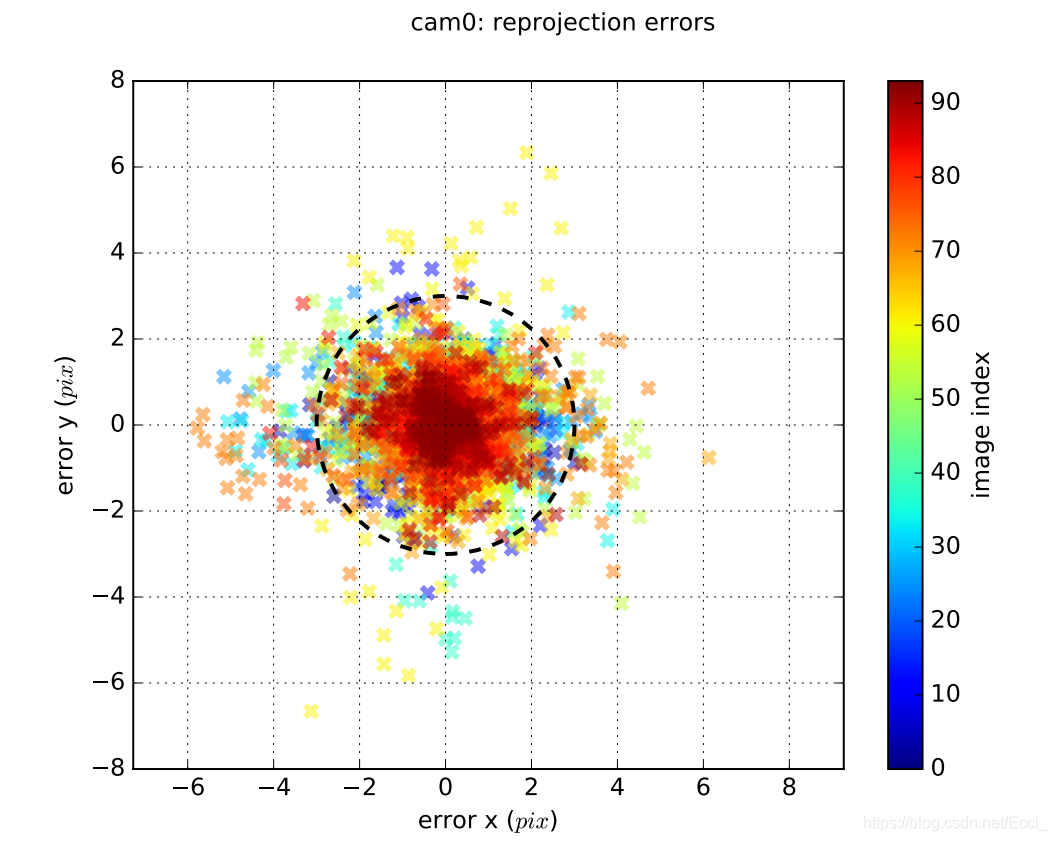
标定评价
一般般。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)