文章目录
- 1 R2LIVE
- 2 安装依赖
- 2.1 Ubuntu和ROS
- 2.2 Ceres Solver
- 2.3 livox_ros_driver
- 3 编译R2LIVE
- 4 运行示例
1 R2LIVE
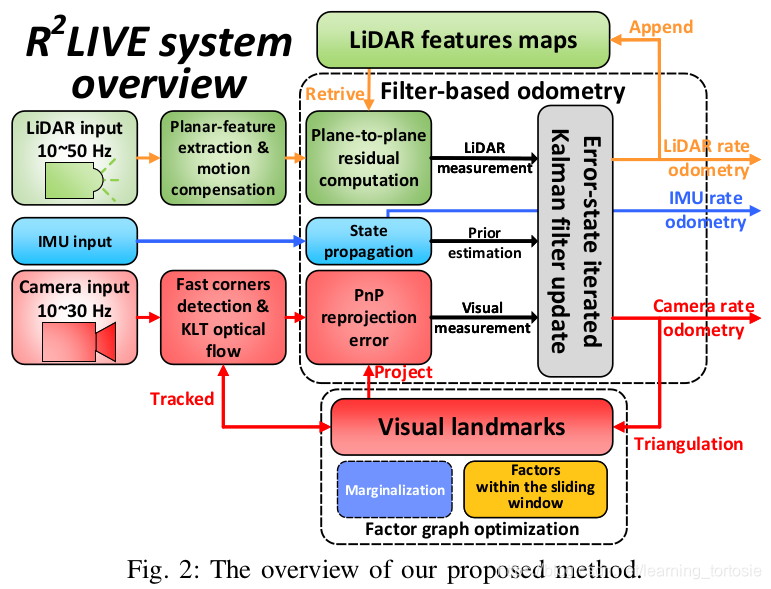
R2LIVE 是一个强大的、实时的、紧密耦合的多传感器融合框架,它融合了来自 LiDAR、惯性传感器、视觉相机的测量结果,以实现稳健、准确的状态估计。利用所有单个传感器的测量结果,我们的算法对各种视觉故障、LiDAR 退化场景具有足够的鲁棒性,并且能够在机载计算平台上实时运行,如在室内、室外进行的大量实验所示,以及不同规模的混合环境。
系统架构:
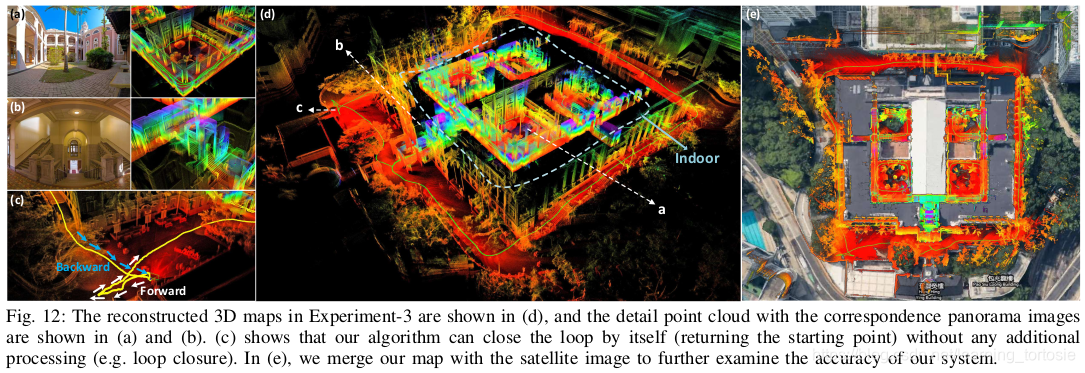
建图效果:
相关资料:
- 论文:https://github.com/hku-mars/r2live/blob/master/paper/R2LIVE_amended_v1.pdf
- Github:https://github.com/hku-mars/r2live
- 视频:https://www.youtube.com/watch?v=9lqRHmlN_MA
2 安装依赖
2.1 Ubuntu和ROS
支持Ubuntu 16.04/18.04和ROS Kinetic/Melodic。
可以根据以下链接安装ROS,注意Ubuntu和ROS版本的对应关系。
http://wiki.ros.org/ROS/Installation
我的环境为Ubuntu 18.04和ROS Melodic。
除了ROS,还需要安装额外的ROS package:
sudo apt-get install ros-XXX-cv-bridge ros-XXX-tf ros-XXX-message-filters ros-XXX-image-transport
注意:将上面命令中的XXX替换为你的ROS发行版。
如果使用ROS Melodic,命令应该是:
sudo apt-get install ros-melodic-cv-bridge ros-melodic-tf ros-melodic-message-filters ros-melodic-image-transport
2.2 Ceres Solver
sudo apt-get install -y libgoogle-glog-dev
sudo apt-get install -y libatlas-base-dev
wget -O ~/Downloads/ceres.zip https://github.com/ceres-solver/ceres-solver/archive/1.14.0.zip
cd ~/Downloads/ && unzip ceres.zip -d ~/Downloads/
cd ~/Downloads/ceres-solver-1.14.0
mkdir ceres-bin && cd ceres-bin
cmake ..
sudo make install -j4
2.3 livox_ros_driver
1.安装Livox SDK:
sudo apt install cmake
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK
cd build && cmake ..
make
sudo make install
2.下载livox_ros_driver并编译
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
cd ws_livox
catkin_make
3.更新当前的ROS package环境
source ./devel/setup.sh
3 编译R2LIVE
cd ~/catkin_ws/src
git clone https://github.com/hku-mars/r2live.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
在Ubuntu 18.04和ROS melodic环境下,编译报错:
/usr/include/flann/ext/lz4.h:196:57: error: conflicting declaration ‘typedef struct LZ4_stream_t LZ4_stream_t’
typedef struct { long long table[LZ4_STREAMSIZE_U64]; } LZ4_stream_t;
解决办法:
sudo mv /usr/include/flann/ext/lz4.h /usr/include/flann/ext/lz4.h.bak
sudo mv /usr/include/flann/ext/lz4hc.h /usr/include/flann/ext/lz4.h.bak
sudo ln -s /usr/include/lz4.h /usr/include/flann/ext/lz4.h
sudo ln -s /usr/include/lz4hc.h /usr/include/flann/ext/lz4hc.h
参考:
- https://blog.csdn.net/weixin_42194536/article/details/107816912
- https://github.com/ethz-asl/lidar_align/issues/16
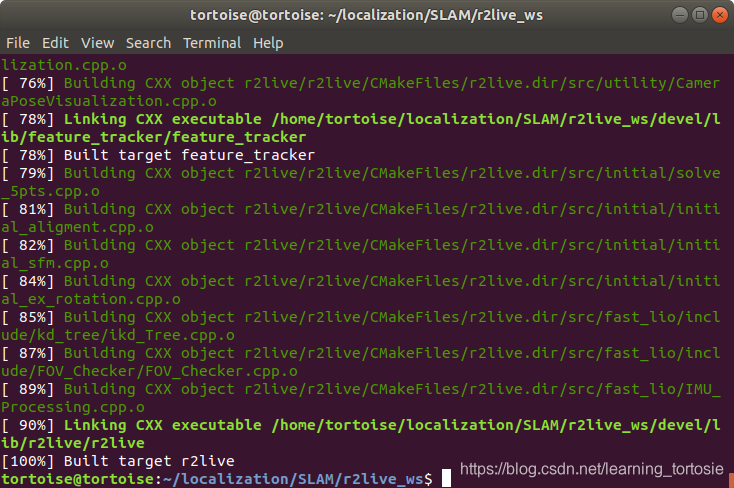
编译成功的终端截图如下:
4 运行示例
1.下载录制好的ROS bag

2.运行R2LIVE
roslaunch r2live demo.launch
3.播放bag
rosbag play YOUR_DOWNLOADED.bag
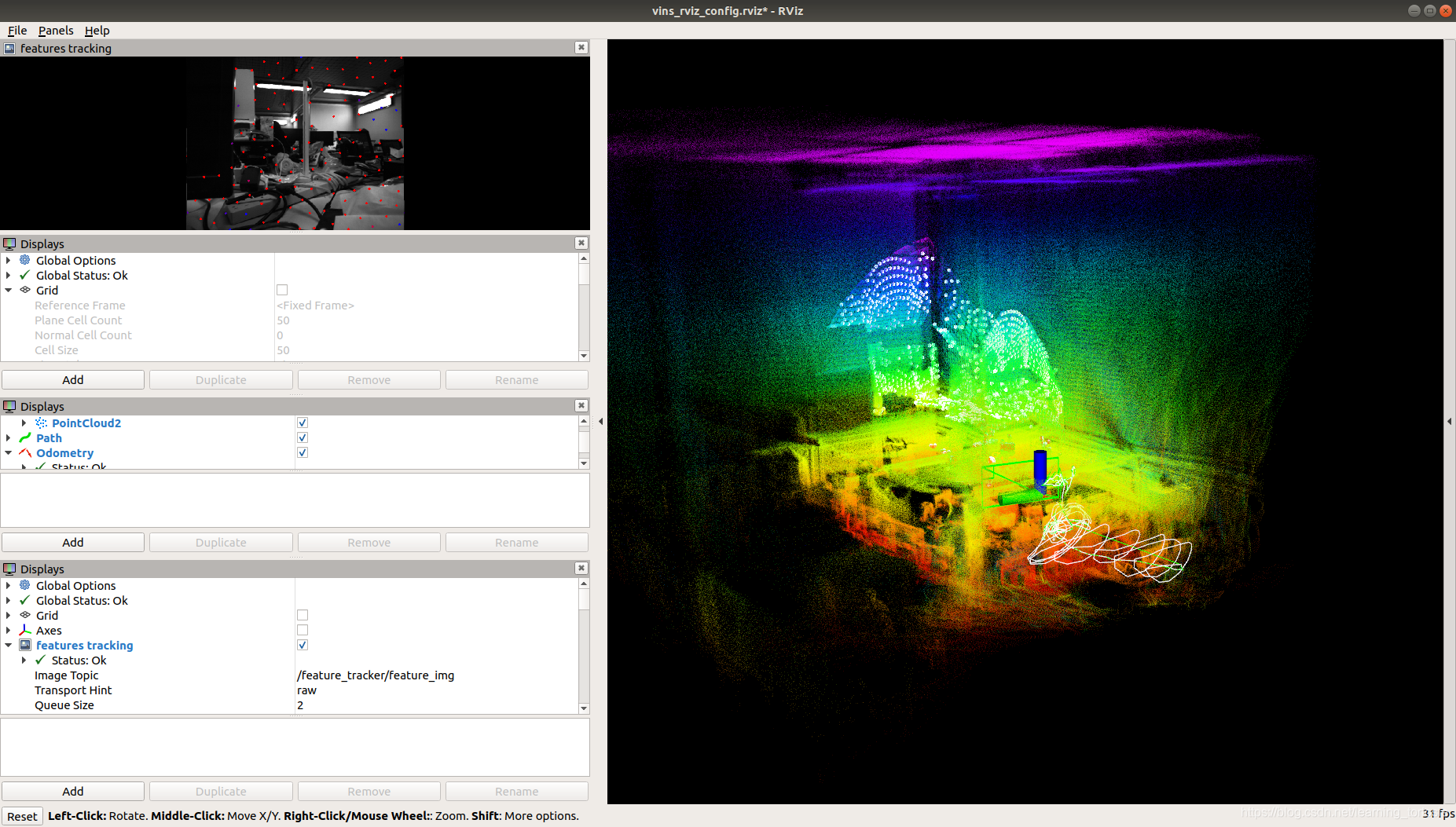
来欣赏一波美图吧:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)