目录
LCD12864简介
特征
工作参数
LCD12864引脚说明
LCD12864常用指令集
基本指令
扩充指令
字符表
汉字显示地址编排编辑
绘图地址与汉字显示编排示意图
程序设计
图形显示程序
字符显示程序设计
LCD12864简介
特征
- ST7920控制器、内置字库、可显示汉字(基础指令集)、可绘制图形(扩展指令集)、串并两种(psb进行选择)控制方式
工作参数
- 显示容量:128x64个点
- 工作电压:3.3V~5V
- 模块最佳工作电压:5.0V
- 接口:8位并行/4位并行/3位串行
- 工作温度:-10~60
LCD12864引脚说明

LCD12864常用指令集
基本指令
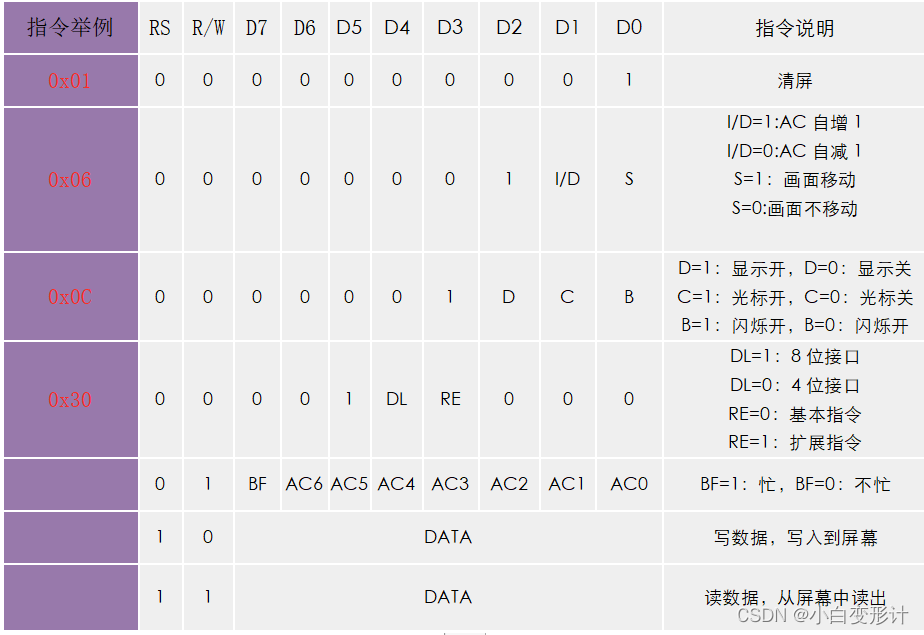
扩充指令

注:常用0x36 、0x34
| 0\1 | DL | RE | G |
| 1 | 8位并行接口 | 扩充指令集 | 绘图显示开 |
| 0 | 4位并行接口 | 基本指令集 | 绘图显示关 |
字符表

注:字符显示需要 16x8 个格显示,故一行最多十六个字符(1字节)
汉字显示地址编排
注:汉字显示需要16x16个格显示,故一行最多八个汉字 (2字节)
绘图地址与汉字显示编排示意图

注:小方格及水平坐标垂直坐标代表绘图地址示意,黑色字体为汉字地址示意
注:一列代表八个点,正好可以对应八位的16进制数
程序设计
图形显示程序
void LCD12864_Picture(uint8 *s)
{
uint8 i,j;
LCD12864(0X34);//扩充指令集,并关闭绘图显示
//上半屏显示
if(i=0;i<32;i++)
{
LCD12864_WCMD(0X80+i);//设置行
LCD12864_WCMD(0X80);//设置列
for(j=0;j<16;j++)//128/8=16
LCD12864WDAT(*s++);
}
//下半屏显示
if(i=0;i<32;i++)
{
LCD12864_WCMD(0X80+i);//设置行
LCD12864_WCMD(0X88);//设置列
for(j=0;j<16;j++)//128/8=16
LCD12864WDAT(*s++);
}
LCD12864(0X34);//扩充指令集,并打开绘图显示
LCD12864(0X30);//回到基础指令集
}
字符显示程序设计
void LCD12864_Char(uint8 code *pAddr)
{
uint8 i;
LCD12864_WCMD(0X80);//设置起始地址
for(i=0;i<32;i++) //写第一行和第三行数据
{
LCD12864WDAT(*s++);
}
LCD12864_WCMD(0X90);//设置起始地址
for(i=32;i<64;i++) //写第二行和第四行数据
{
LCD12864WDAT(*s++);
}
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)