前言
该播放器参考了SMPlayer,实现了其基础功能,许多高级功能暂未实现
软件的实现基于Qt,opencv,多线程以及数据库等相关知识

功能概述
①支持本地音视频在线播放,url网络视频在线播放
②支持视频实时开始、暂停、停止、快进、跳转、倍速、缩放及音量调节等
③收藏夹,可建立收藏夹保存自己感兴趣的视频,方便日后再次观看
④最近播放列表,记录近期的观看记录
⑤播放列表,可添加或删除资源,设置播放模式(随机,顺序,循环)及搜索等
⑥逐帧播放,让视频可一帧一帧逐帧进退播放
⑦倒放,让视频可倒放
⑧可设立标记,循环播放标记间的视频段,方便我们重复观看某一段视频
⑨其他,视频截图,视频信息查看,打开浏览器等
功能演示
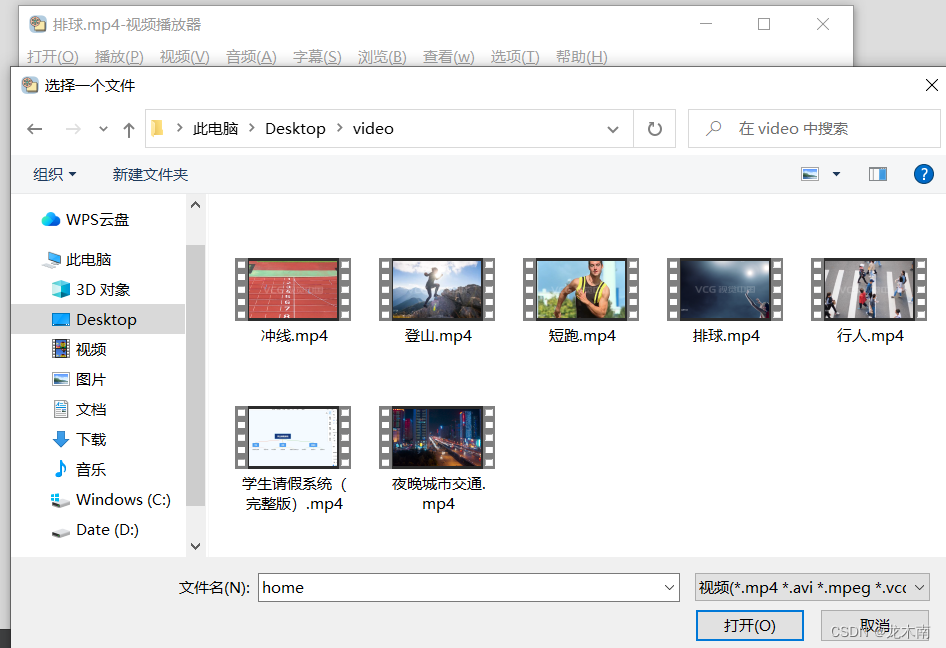
选择本地资源播放
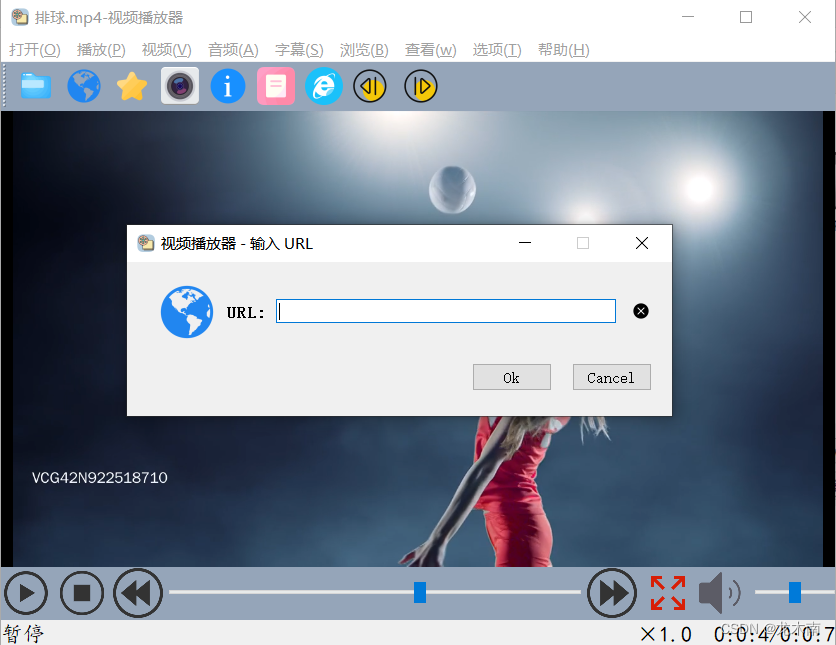
url资源播放
收藏夹

播放列表

最近播放列表

视频倒放
其他功能



还有许多功功能如视频逐帧播放、设置标志循环,截图等等不方便演示,可拿源码自行实验
(需配置一定环境例如opencv才可运行,所以源码大家可以参考,具体功能实现欢迎讨论交流)
项目源码:https://github.com/17359830697/VideoPlayer
持续更新Qt项目,免费获项目源码~
喜欢的话就点赞收藏关注吧~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)