Ubuntu18.04下安装Cuda8及以上版本
cuda8已经不支持GCC5及以上版本的安装,而ubuntu18自带的gcc版本为7.5,所以安装时会报错Error: unsupported compiler: 7.5.0. Use --override to override this check. 看了很多帖子都是在切换gcc版本为4.7,但是服务器源或者国内源里已经没有GCC-4版本了,此篇文章目的是在不切换gcc和g++版本的情况下安装cuda8或者以上版本,都是通用的
安装显卡驱动
ubuntu18.04及以上版本可以直接在系统自带的软件与更新中安装显卡驱动,是最简单的一种方法,换源也在这里进行,省去了很多麻烦,步骤如下
打开桌面左下角全部应用面板,打开 软件与更新
 选择 下载至 其他站点 然后选择一个你想用的源地址,我这里用的是阿里云
选择 下载至 其他站点 然后选择一个你想用的源地址,我这里用的是阿里云
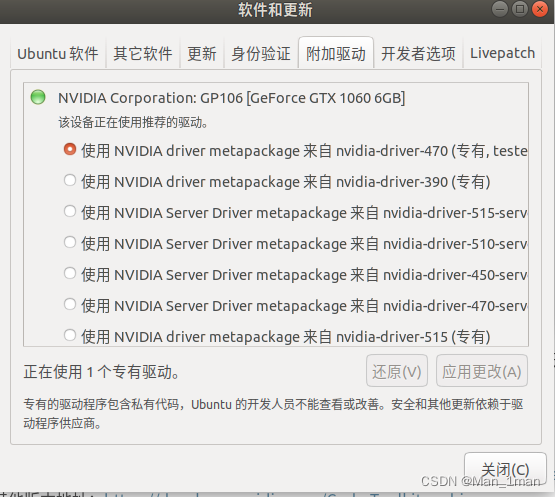
 选择完源地址后点击右下角关闭,然后点击刷新应用列表,等待完成,然后再次打开此应用,点击附加驱动,选择一个驱动进行安装,推荐选择tested和专有的
选择完源地址后点击右下角关闭,然后点击刷新应用列表,等待完成,然后再次打开此应用,点击附加驱动,选择一个驱动进行安装,推荐选择tested和专有的
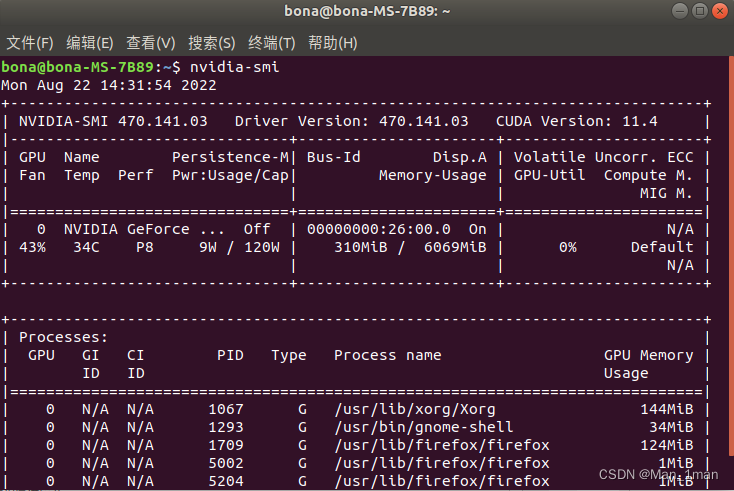
 安装完成,重新启动电脑,打开命令行窗口,输入 nvidia-smi 查看显卡驱动是否安装成功,安装成功会输出显卡驱动版本信息和推荐的Cuda版本
安装完成,重新启动电脑,打开命令行窗口,输入 nvidia-smi 查看显卡驱动是否安装成功,安装成功会输出显卡驱动版本信息和推荐的Cuda版本
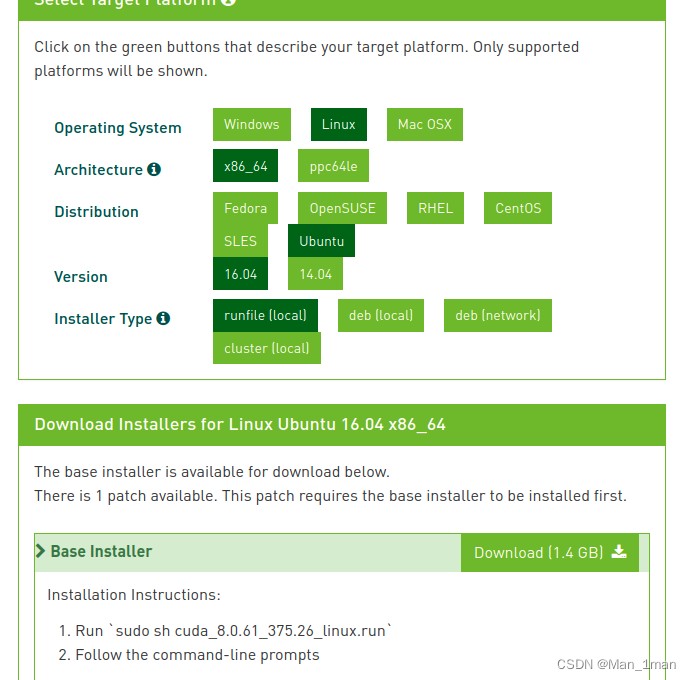
下载cuda8.0
cuda8.0 地址:https://developer.nvidia.com/cuda-80-ga2-download-archive
其他版本地址:https://developer.nvidia.com/Cuda-Toolkit-archive
选择对应版本下载即可
 然后进入到下载文件夹,进入到命令行窗口,输入:
然后进入到下载文件夹,进入到命令行窗口,输入:
bash ./cuda*.run --tar mxvf
sudo cp InstallUtils.pm /usr/lib/x86_64-linux-gnu/perl-base
export $PERL5LIB
然后运行刚刚下载的文件
sudo sh cuda_8.0.61_375.26_linux.run --override
安装过程一直按回车键,直到出现 accept
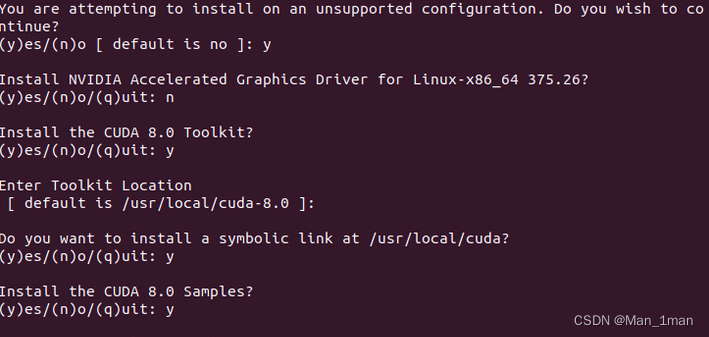 显卡驱动已经提前安装好,这里就不安装了
显卡驱动已经提前安装好,这里就不安装了
cuda安装完毕后,要把路径写到系统路径里,命令行输入
gedit ~/.bashrc
在打开的文件里加入
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda/lib64
export PATH=$PATH:/usr/local/cuda/bin
export CUDA_HOME=$CUDA_HOME:/usr/local/cuda
更新一下
source ~/.bashrc
打开命令行终端,输入nvcc -V查看cuda是否安装成功
到这里,基于Ubuntu18.04下安装Cuda8及以上版本的文章就结束啦,有什么问题欢迎留言!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)