点云配准(Point Cloud Registration)是将两个或多个点云数据集对齐的过程,以便于后续的分析和处理。点云配准的目标是找到一个变换矩阵,将点云数据集从一个坐标系转换到另一个坐标系,使得它们最大程度地重叠。点云配准的方法主要包括以下几种:
- 基于特征点的配准方法:该方法首先从点云数据集中提取一些特征点,如SIFT、SURF等,然后通过匹配这些特征点来计算变换矩阵。该方法对于具有明显特征的点云数据集效果较好。
- 基于全局优化的配准方法:该方法通过最小化点云数据集之间的距离来计算变换矩阵。常用的算法有ICP(Iterative Closest Point)和NDT(Normal Distributions Transform)等。
- 基于局部优化的配准方法:该方法通过将点云数据集划分成多个局部区域,然后对每个局部区域进行配准,最终得到整个点云数据集的变换矩阵。常用的算法有FPFH(Fast Point Feature Histograms)和SHOT(Signature of Histograms of OrienTations)等。
点云配准在计算机视觉、机器人、自动驾驶等领域都有着广泛的应用。
点云配准旨在将不同坐标系获取的点云数据变换到同一坐标系,根据视图数量可分为两两视图点云配准和多视图点云配准。二视图点云配准是指将两个视角的点云数据对齐的过程,常用于立体视觉等应用中。该方法通常需要先提取两个视角的特征点,然后通过特征点之间的匹配来计算两个视角之间的变换矩阵。多视图点云配准是指将多个视角的点云数据集对齐的过程。与二视图点云配准不同的是,多视图点云配准需要同时考虑多个视角之间的关系,因此需要更加复杂的算法来求解变换矩阵。
多视图视图点云配准
多视图点云配准通过算法建立点云间的关联,将所有不同坐标系下的点云数据配准到参考坐标系.在多视图点云配准整个流程中,先进行多视图点云粗配准再进行多视图点云精配准是当前最广泛使用的多视图点云配准策略,下图为多视图点云配准策略。
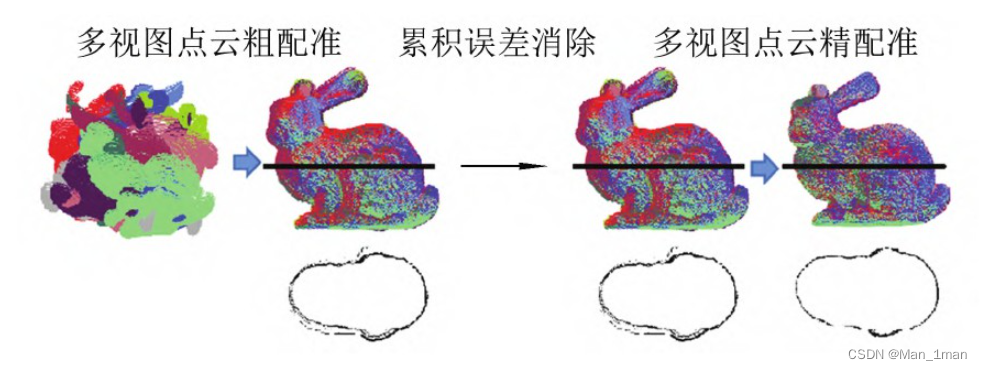
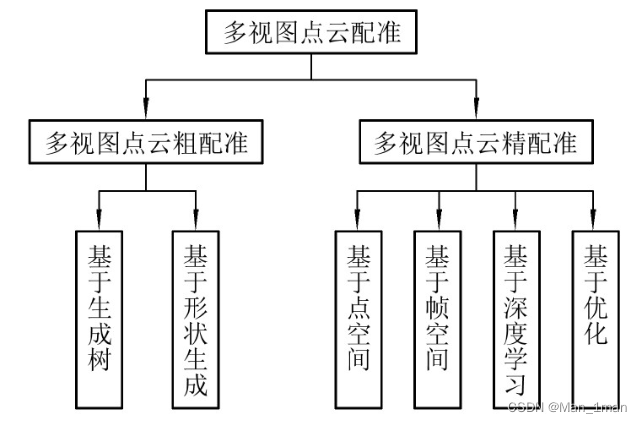
根据配准任务不同,可将多视图点云配准划分为多视图点云粗配准和多视图点云精配准,其中:多视图点云粗配准将所有视图点云数据初始对齐,为精配准提供良好的初始条件;多视图点云精配准 则是在多视图点云粗配准的基础上,进一步消除所有视图点云间的累计误差,使得多个点云之间的配 准累计误差尽最大可能被消除。
多视图点云粗配准
多视图点云粗配准是指将多个视角的点云数据集进行初步对齐的过程,通常用于点云数据集较大、初始位置未知或存在较大的位置偏移的情况下。多视图点云粗配准的目标是寻找一个初始变换矩阵,将多个视角的点云数据集粗略地对齐,以便于后续的精配准。
多视图粗配准算法根据是否建立点云数据间的网络拓扑关系,可分为基于生成树的多视图粗配准算法和基于形状生成的多视图粗配准算法.
基于生成树的粗配准
基于生成树多视图点云粗配准算法的核心思想 是把每个点云看作节点,首先根据节点间的关系构 建生成树,根据生成树可以直接或间接配准任意两 组点云;然后选择参考坐标系,通过相应点云间的 运动变换将所有视图点云数据配准到参考坐标系。
基于生成树的多视图粗配准算法是一种基于几何约束的多视图点云粗配准方法。该方法通过构建每个视角点云数据集之间的最小生成树(Minimum Spanning Tree,MST),然后通过计算MST之间的平移、旋转和缩放等几何变换参数,将多个视角的点云数据集对齐。
具体来说,该算法的步骤如下:
- 对于每个视角的点云数据集,首先计算其最近邻点(Nearest Neighbor,NN)。
- 基于每个视角的NN信息,构建该视角点云数据集所在的MST。
- 对于所有的MST,选取其中一个作为参考树,然后计算其它MST相对于参考树的平移、旋转和缩放等几何变换参数。
- 将所有MST按照变换参数的相似度进行聚类,得到多个聚类簇。
- 对于每个聚类簇,选取其中一个MST作为代表树,然后将其它MST相对于代表树进行变换,得到多个视角的点云数据集的粗配准结果。
该算法的优点是可以利用点云数据集之间的几何约束关系进行粗配准,从而提高配准的鲁棒性和准确性。然而该算法的缺点是需要先构建最小生成树,计算量较大,且对于某些不符合几何约束的点云数据集,可能会出现配准失败的情况。
基于生成树的多视图点云粗配准有两种方案获 得生成树.第一种方案:首先进行所有两两视图点云配准,若配准成功则建立连接,否则不建立连接;然后根据两两视图配准结果生成连通图;最后在连通图中根据一定的约束条件和最优条件获得生成树.虽然该类生成树算法能够得到较好的粗配准 结果,但是生成树通过暴力穷举所有两两视图配准 获得,假设有N片点云,使用同一种两两视图点云配准算法,该类生成树粗配准算法的时间复杂度高 达O(N^2)。
针对穷举两两视图点云配准来生成树算法存在的问题,于是便有了第二种方案,即改进的生成树多视图点云粗配准算法:选择一点云作为生成树根节点,将剩余点云依次与根节点进行两两视图点云配准,若存在节点无法与根节点成功配准,则待所有节点与根节点完成配准,选择一个与根节点直接相连的节点作为新的根节点,继续两两视图点云进行配准,直到建立生成树.该算法相较于穷举 两两视图点云配准来生成树的多视图粗配准算法,使用相同的两两配准算法,配准次数大幅度减少, 从而大规模降低了粗配准时间开销。
基于形状生成的多视图粗配准算法
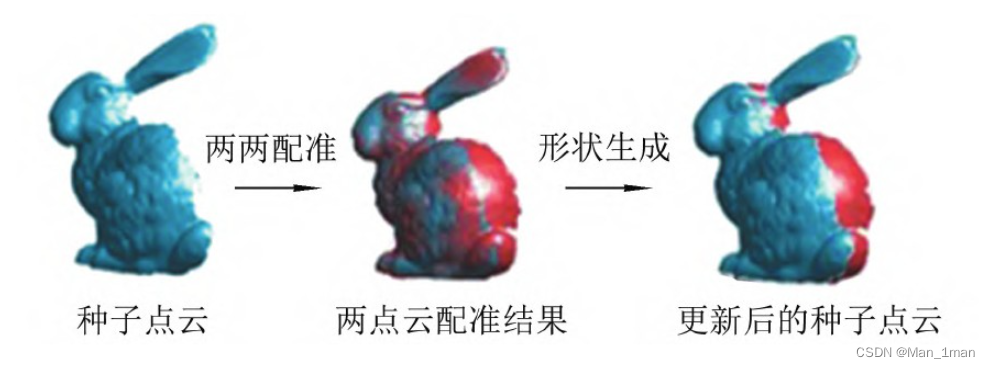
基于形状生成的多视图点云粗配准算法核心是迭代生成种子性状点云数据,将其作为目标点云,增加源点云与目标点云的重叠率,从而提高配准成功的可能性.该类算法适用于点云之间重叠率较低 的数据集。形状生成算法首先将所有点云初始化到搜索集合,然后任意选择一点云作为种子形状点 云,并将种子形状点云从搜索集合移除;当搜索集合不为空集时:
a.从搜索集合中选择一点云作为 源点云与种子性状点云两两视图点云配准;
b.若 两两配准成功,则将种子形状点云更新,将源点云与种子性状点云非重叠部分点云数据加到种子形状点云中,并将源点云从搜索集合中移除,若两两配准失败,则选择搜索集合中的其他点云作为源点云。
基于形状生成的多视图粗配准算法是一种基于几何约束的多视图点云粗配准方法。该方法通过对每个视角的点云数据集进行形状生成,然后计算形状之间的相似度,从而实现多视图点云的粗配准。
具体来说,该算法的步骤如下:
- 对于每个视角的点云数据集,首先提取其形状特征,如球面谐波函数(Spherical Harmonic Functions,SHF)、3D形状上的高斯函数(3D Gaussian Functions,3DGF)等。
- 基于每个视角的形状特征,计算形状之间的相似度矩阵。
- 对于相似度矩阵,利用分层聚类的方法将多个视角的点云数据集划分成多个聚类簇。
- 对于每个聚类簇,选取其中一个点云数据集作为代表形状,然后将其它点云数据集相对于代表形状进行变换,得到多个视角的点云数据集的粗配准结果。
 该算法的优点是可以利用点云数据集之间的形状相似性进行粗配准,从而提高配准的鲁棒性和准确性。与基于生成树的多视图粗配准算法相比,该算法不需要构建最小生成树,计算量较小,且对于某些不符合几何约束的点云数据集,也能够实现较好的粗配准效果。
该算法的优点是可以利用点云数据集之间的形状相似性进行粗配准,从而提高配准的鲁棒性和准确性。与基于生成树的多视图粗配准算法相比,该算法不需要构建最小生成树,计算量较小,且对于某些不符合几何约束的点云数据集,也能够实现较好的粗配准效果。
多视图点云精配准
多视图点云粗配准得到一组点云初始对齐的变换矩阵作为多视图精配准的输入,多视图点云精配准则更多关注于多视图点云配准的精度。
精配准的模式基本上已经固定为使用ICP算法及各种变种,ICP算法由 Besl and McKay 1992,《Method for registration of 3-D shapes文章提出。文中提到的算法不仅仅考虑了点集与点集之间的配准,还有点集到模型、模型到模型的配准等。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)