一、查看本机串口信息
1. 串口是否在使用
串口在 /dev 目录中,查看串口是否在使用,可以用命令
ls -l /dev/ttyUSB0
说明:
ls -l:是查看目录的命令,直接用ls或ll也可以。
ttyUSB0:是串口名,一般都是tty开头,根据连接设备不同,有的串口名为 ttyS0 ,有的为ttyACM0,后面的0是串口号,按照你的需要改。
结果:
如果在使用会显示串口文件信息
没有使用会显示 “ls: 无法访问’/dev/ttyUSB0’: 没有那个文件或目录”
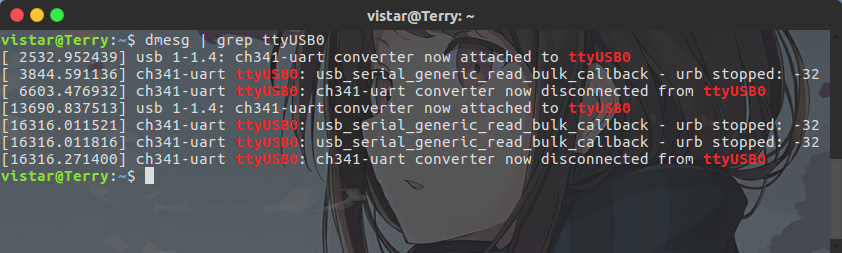
2. 查看串口设备
dmesg | grep ttyUSB0
二、串口调试软件
Windows下的串口调试软件有好多,Linux下资源相对较少,不过也有那么几个好用的。
1. minicom
听说它功能很强大,但它没有UI界面,开始用还不太顺手。
安装:
sudo apt install minicom
具体用法还不太熟练,以后再补吧。
上个图:

2. CuteCom
这个就友好点,有界面了。和Windows的差不多,可以选择串口,设置波特率、数据位、停止位等。
中间是接收窗口,下面是发送窗口。
安装:
# 安装
sudo apt install cutecom
# 启动
sudo cutecom
来张图:
3. COMTool
这个是在github上找到的,由Neucrack Neutree开发,用python3开发,这里要注意,你电脑没有Python3是不能运行的。值得注意的是,它支持跨平台,linux、windows、mac都可以用。
github链接
github有各平台的安装及使用教程。
三、串口权限问题
Linux串口是默认普通用户没有读写权限的,每次开机后对串口读写都要附加权限
sudo chmod 666 /dev/ttyUSB0
但对于需要开机自动运行的程序就很麻烦了,所以可以设置永久加权
- 打开下面的文件
远程的话要把gedit换成vi或nano等。
这个文件本来是不存在的,只不过编辑器打开不存在的文件会自动创建。
70-usb-serial.rules文件名可以自定义,但必须以.rules结尾。
sudo gedit /etc/udev/rules.d/70-usb-serial.rules
2.在文件中添加如下内容
ttyUSB*表示所有这一格式的串口名,如果你的是ttyS*或其它,按需改。
0666表示加权模式,和chmod后面的参数一致,写成666也可以。
vibot_base是我自定义的串口名,就是为ttyUSB*创建一个超链接 ,如下图。如果你不需要,可以去掉最后一项。
KERNEL=="ttyUSB*", MODE="0666", SYMLINK+="vibot_base"

- 重启电脑
重启电脑使修改生效。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)