搭建百度apollo环境
- 0-前言
- 1-目标
- 2-方法
- 3-Apollo环境搭建
- 3.1-CPU版
- 3.1.1前置依赖硬件条件
- 3.2-GPU版
- 前置依赖软件
- 1.安装 Ubuntu 18.04
- 2.安装 GIT
- 3.安装 Docker 引擎
- 3.1.3克隆 Apollo 源码
- 3.1.4启动 Apollo Docker 开发容器
- 3.1.4进入 Apollo Docker 开发容器
- 3.1.5容器中构建 Apollo
- 3.1.6运行 Apollo
-
- 2.选择驾驶模式和地图
-
- 参考
0-前言
为什么要这件事
无人驾驶行业涉及范围很广,应用到的往往是前言技术,资料又比较零散,少有成体系的讲理论与实战。我将要做的事情就是通过仿真的方式,带你通过可视的方法理解无人驾驶。
1-目标
项目的目标是给想要了解,转行无人驾驶或者,想要从事无人驾驶某个专项深耕的人,简历一个无人驾驶的知识星球。建立一个无人驾驶领域的业务体系,搭建出一套可debug的仿真环境,实战学习相关算法,提高个人能力提高专项技能。
2-方法
项目将以百度开源apollo项目为项目的开端,带你如何搭建一套可debug的环境,从实践入手,摆脱纯理论阶段。
一点点的通过仿真的方式,了解规控算法,感知算法等。一点点的深耕其实现原理和业务设计理论(业务上为什么要这么做)。
3-Apollo环境搭建
如果你还你点不了解无人驾驶,没关系。我们先搭建一套apollo环境,从实践的角度,跑起来看看怎末玩。
3.1-CPU版
3.1.1前置依赖硬件条件
特点是cpu要新,内存和存储要大
|CPU:Intel 11代酷睿i9 11900(八核十六线程,最大睿频5.2GHz)
|内存:威刚DDR4 32G 3200(可根据需求扩展至128G)
|硬盘:西数黑盘500G
3.2-GPU版
|CPU:Intel 11代酷睿i9 11900(八核十六线程,最大睿频5.2GHz)
|内存:威刚DDR4 32G 3200(可根据需求扩展至128G)
|硬盘:西数黑盘500G
|显卡:NVIDIA GeForce RTX2060 12G
安装 NVIDIA 显卡驱动
可以通过界面的方式安装
随后,可以通过在终端中执行 nvidia-smi 命令来查看 NVIDIA 显卡工作是否正常(完成驱动安装后可能需要重启),正常情况下终端将显示下面的信息:
Sun Mar 27 10:35:07 2022
±----------------------------------------------------------------------------+
| NVIDIA-SMI 470.103.01 Driver Version: 470.103.01 CUDA Version: 11.4 |
|-------------------------------±---------------------±---------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=++==============|
| 0 NVIDIA GeForce … Off | 00000000:01:00.0 On | N/A |
| 0% 37C P8 20W / 184W | 553MiB / 12026MiB | 7% Default |
| | | N/A |
±------------------------------±---------------------±---------------------+
±----------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=============================================================================|
| 0 N/A N/A 1113 G /usr/lib/xorg/Xorg 215MiB |
| 0 N/A N/A 1343 G /usr/bin/gnome-shell 61MiB |
| 0 N/A N/A 2819 G /usr/lib/firefox/firefox 226MiB |
| 0 N/A N/A 5156 G …404678048605711115,131072 8MiB |
| 0 N/A N/A 24499 G …AAAAAAAAA= --shared-files 33MiB |
| 0 N/A N/A 25945 G /usr/lib/firefox/firefox 1MiB |
±----------------------------------------------------------------------------+
安装 NVIDIA 容器工具包
如果是在物理机中安装的 Ubuntu,且机器配有 NVIDIA 显卡,在安装了驱动的前提下,还需要安装 NVIDIA 容器工具包以运行 Apollo Docker 镜像中的 CUDA:
distribution=$(. /etc/os-release;echo
I
D
ID
IDVERSION_ID)
curl -s -L https://nvidia.github.io/nvidia-docker/gpgkey | sudo apt-key add -
curl -s -L https://nvidia.github.io/nvidia-docker/$distribution/nvidia-docker.list | sudo tee /etc/apt/sources.list.d/nvidia-docker.list
sudo apt-get -y update
sudo apt-get install -y nvidia-docker2
前置依赖软件
- 安装 Ubuntu 18.04
- 安装 Git
- 安装 Docker 引擎
1.安装 Ubuntu 18.04
系统的安装参考网上教程;
2.安装 GIT
为什么要安装git,因为要从仓库上拉取代码;由于代码较大,所以使用ssh的方式最稳妥,不会中途断掉;所以要有一个github账号.
- ubuntu安装git
- 生成git ssh key
- 添加key 到GitHub上
参考链接
https://www.cnblogs.com/zxlovenet/p/4571850.html
3.安装 Docker 引擎
安装Docker 19.03 及以上版本,在终端中直接执行下述命令即可完成 Docker 社区版的安装:
curl https://get.docker.com | sh
sudo systemctl start docker && sudo systemctl enable docker
重启 Docker 守护进程以使改动生效:
sudo systemctl restart docker
3.1.3克隆 Apollo 源码
推荐使用过 SSH 方式克隆 Apollo 源码仓库:
# 使用 SSH 的方式
git clone git@github.com:ApolloAuto/apollo.git
3.1.4启动 Apollo Docker 开发容器
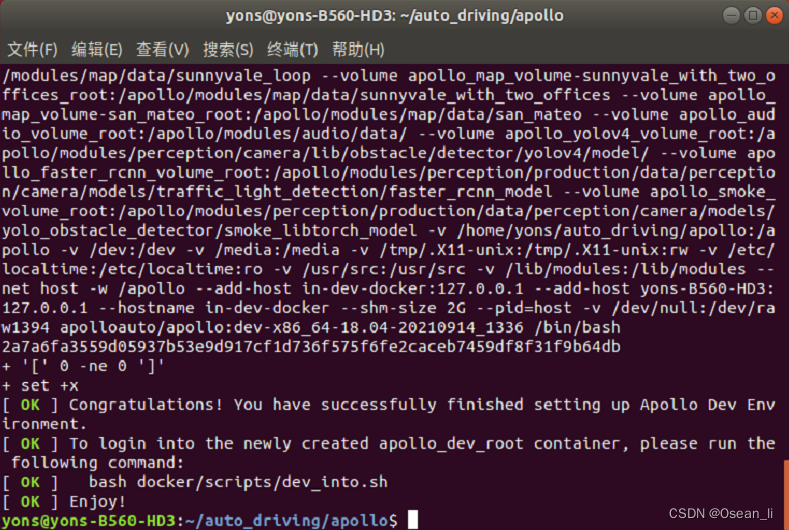
进入到 Apollo 源码根目录,打开终端,执行下述命令以启动 Apollo Docker 开发容器:
sudo ./docker/scripts/dev_start.sh
不出意外得话,启动成功后将得到下面信息:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-s0XioVjk-1651472623736)(
3.1.4进入 Apollo Docker 开发容器
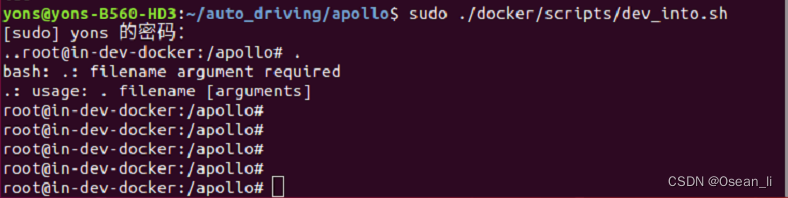
启动 Apollo Docker 开发容器后,执行下述命令进入容器:
sudo ./docker/scripts/dev_into.sh
可以发现,进入容器后终端信息发生了相应变化,后面的操作都将在容器中进行:
若提示 [WARNING] nvidia-smi not found. CPU will be used. 请确认是否要用gpu编译,不是则忽略。若是,请检查NVIDIA 容器工具包 是否安装,重新执行sudo ./docker/scripts/dev_start.sh可解决。
3.1.5容器中构建 Apollo
进入 Apollo Docker 开发容器后,在容器终端中执行下述命令构建 Apollo:sudo ./apollo.sh build 自动适配用cpu编译还是gpu
sudo ./apollo.sh build
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-UuFJZO8l-1651472623738)(D:\自动驾驶\AutoDriving\note\picture\image-20220327104702662.png)]](https://img-blog.csdnimg.cn/59851e21c5984399a9c7bdfa1ce22b02.png)
用时739秒编译成功后如下 Enjoy!
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rLUV3CEH-1651472623738)(D:\自动驾驶\AutoDriving\note\picture\image-20220327104521869.png)]](https://img-blog.csdnimg.cn/2980b92205574a6d87daaf1277419e8c.png)
3.1.6运行 Apollo
1 启动 Apoll
完成 Apollo 构建后,在容器终端中执行下述命令:
./scripts/bootstrap.sh start
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-hPHNXOY8-1651472623739)(D:\自动驾驶\AutoDriving\note\picture\image-20220302214849969.png)]](https://img-blog.csdnimg.cn/10eb672f505e4ff7b66f5c01018e4a9b.png)
上述命令会启动 DreamView 并使能模块监控机制,在浏览器中访问 http://localhost:8888 来显示 DreamView 界面:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-a1EHpIhG-1651472623739)(D:\自动驾驶\AutoDriving\note\picture\image-20220302215021865.png)]](https://img-blog.csdnimg.cn/e181d41107fb47d79aa274a2071b58e2.png)
2.选择驾驶模式和地图
在 DreamView 界面的对应下拉框中选择驾驶模式为“Mkz Example,选择地图为“Sunnyvale with Two Offices”:
![DreamView 中选择驾驶模式和地图[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ensksG3q-1651473530660)(D:\自动驾驶\AutoDriving\note\picture\image-20220302215221384.png)]](https://img-blog.csdnimg.cn/7063263b18fd4ef4a79d1d913b49d204.png)
3.回放 Demo 数据
在容器终端中执行下述命令下载 demo 数据:
source cyber/setup.bash # 回放包需要设置下环境变量
cd docs/demo_guide/
python3 record_helper.py demo_3.5.record
由于网络原因,下载可能失败,可以点击这里手动下载并将数据放到 apollo/docs/demo_guide/ 目录下。继续在容器终端中执行下述命令来播放数据,-l 表示循环播放(loop):
cyber_recorder play -f demo_3.5.record -l
至此,DreamView 界面中将呈现出自车规划轨迹、他车预测轨迹、路网等各种信息:
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-nS316uQq-1651472623740)(D:\自动驾驶\AutoDriving\note\picture\1646231298454.gif)]](https://img-blog.csdnimg.cn/af313cf711c24812926d328b214ed033.gif)
参考
https://blog.shipengx.com/archives/e4b9c8ad.html
https://blog.csdn.net/weixin_45929038/article/details/120113008
感兴趣点我blibli
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)