最近在用串口调试助手的时候在网上找了好多资料和教程都没有一个完整的,就来写个完整的串口调试助手资料给刚入门或者刚接触的小白,希望有所帮助!
1 . 准备好串口调试助手和虚拟串口驱动软件VirtualSerialPortDriver(见下面链接)
串口调试助手有两个软件基本功能相同,根据自己喜好使用:

安装好虚拟串口驱动软件,具体破解和汉化过程看看里面的说明文档。破解成汉化版之后打开如图所示:
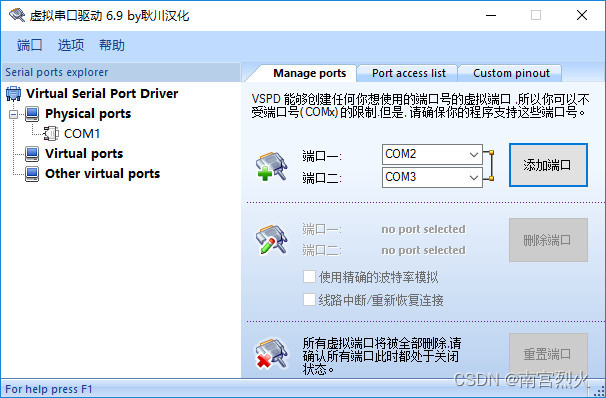
2 .添加和设置端口
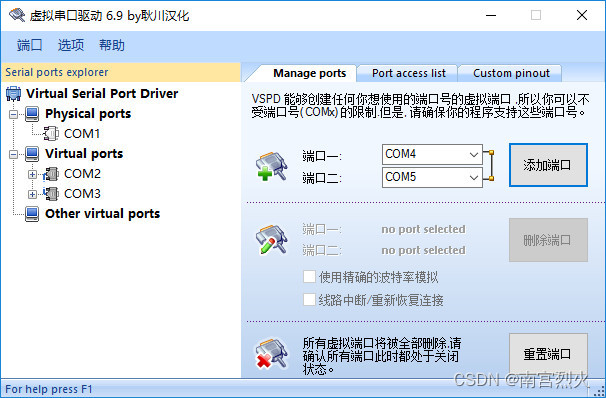
点击添加端口之后如下图所示:
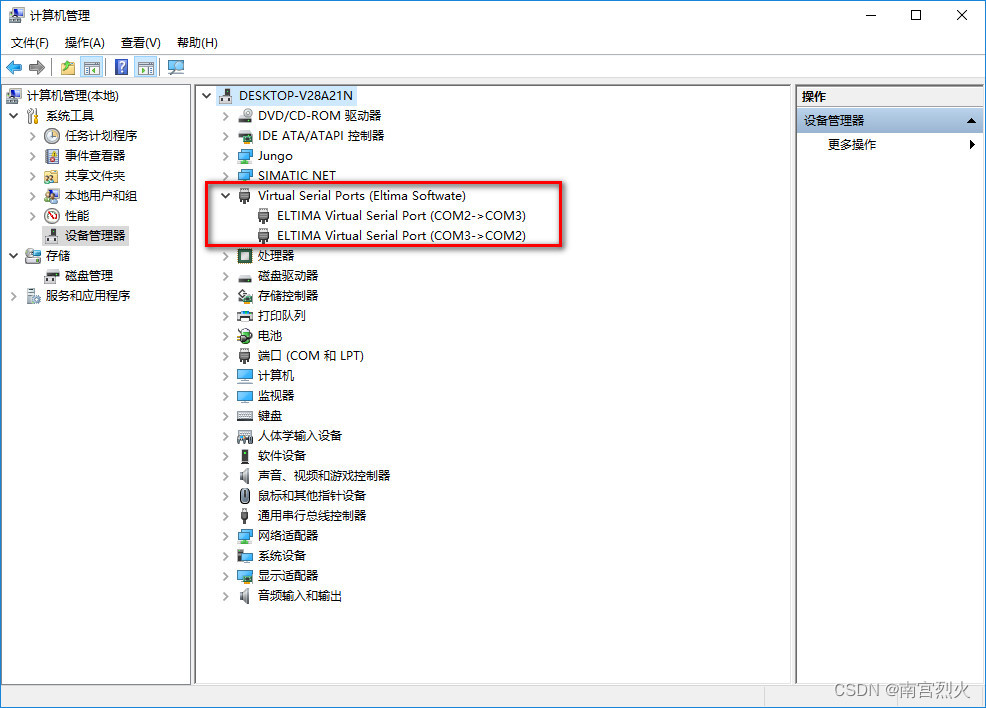
在电脑设备管理器里发现增加了两个虚拟串口驱动,如下图示:
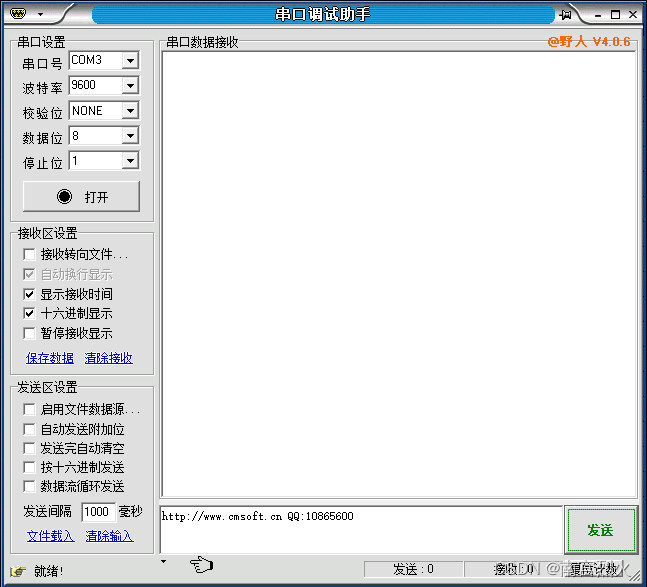
然后关掉虚拟串口驱动软件,打开两个串口调试助手,一个作为发送端,一个作为接收端,设置它们端口,波特率,数据位和停止位。如下图所示:
 然后打开端口,就可以在数据位置 发送数据。如图所示:
然后打开端口,就可以在数据位置 发送数据。如图所示:
串口调试软件链接:https://pan.baidu.com/s/1X_pthTYYlpXagdrZ_lCLVQ 提取码:5y91
虚拟串口驱动软件链接:https://pan.baidu.com/s/1msxDaWcV3muqO0q2Nve9Kw 提取码:f423
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)