前言
绪言
感觉有一年多没发过文章了,这一年多太忙了,来到新的公司后要学的太多了,代码风格,架构,操作系统,各种通讯协议,伺服驱动器,终端,现在又要学习新的语言,太卷了,不过学以致用,别人写的永远是别人的,只有自己从头搞一遍才算差不多搞懂,所以尤其是初级入门一定要多动手,很多东西光看是感觉很简单的,等到自己搞的时候会发现很多问题。
当然写这个东西首先是想巩固自己的东西,另外想自己做点东西出来,自己使用的同时也可以变现,当然咱也有自知之明,肯定是干不过专门搞产品的,所以定位就是喜欢DIY的,或者需要毕设的朋友,当然如果有更好的想法也很欢迎一起交流学习。
前期构思
进入正题了,这个智能家居的灵感是2021年我无人机入门师傅邹哥哥当时一起讨论时给我的,当时知识什么的都比较浅薄也不知道怎么做,能做但是一定也很low,就是组网,但是这个组网不需要过于复杂,当时的思路是室内可以使用几台无人小车,每台车上面搭载一个超声波模块进行扫描,这几台小车都列为从机,可以通过wifi或者别的方式将数据上传到PC或者PC上面挂载的一块主机控制板上,进行地图构建。听起来都头大,不过这样做智能家居其实也挺好的,现在的智能家居一般都是通过esp8266接入网络,这样的话下面的都是从机,这样成本会增大不少(成熟产品除外,毕竟做成产品后成本会大打折扣)。

鉴于上述考虑,选用一个低成本的通讯设备,采用一个主机多个从机的分布,主机获取从机上面的传感器数据,不采用单向上报模式,采用问答模式去实现,这样不会造成多从机时的数据混乱情况,比如有从机1,从机2两个从机,从机1可以是一个宠物喂食设备,从机2是一个烧水壶续水烧水设备,主机首先发送一条数据至两个从机,数据含义是让从机1上报所有数据,从机2由于ID不匹配则不进行上报,从机1将水壶是否有水,是否有粮食,当前还有多少粮食和水的数据报上来,再通过主机的wifi模块可以上报至云平台。
有人会问为啥不都用wifi模块,这样麻烦的一批。我给的答案就是我都要,小孩子才做选择,但是各有各的优点各有各的缺点,2.4G的优点就是可以在没有网络额情况下把数据传回来,又有人说可以用蓝牙,但是2.4G如果加上射频头的话通讯距离就可以吊打蓝牙了,理想状态下8KM没什么问题。
硬件平台
硬件平台我选用STM32F103c8t6,不选407甚至更高端的芯片首先成本大没钱,第二又不是很复杂的东西,简单的103c8t6足够了,flash不够?103rct6,再不够直接407,不过那样代码量就挺大了,芯片定好了开始想板子的设计吧。
第一、需要一个3S(1S有4.2V)降压稳压电路,直接用HG1501S,电压降至5V,在使用RT9193-33把5V降至3.3V供芯片使用,5V和3.3V各拉出3个引脚供传感器使用,如果想控制一些额定电压与输入电压一样的负载怎么办,加一个继电器完活,从机都预留2.4G接口和OLED接口。再来一个复位按键,两个普通按键,两个led灯用来提示运行状态和报警,既然有报警灯那就再来一个蜂鸣器吧。
定好硬件平台后就开始吧!!!!!
结构平台
结构的话比较难想,给板子元件定好位置后给板子画个外壳吧,不然太寒酸了。
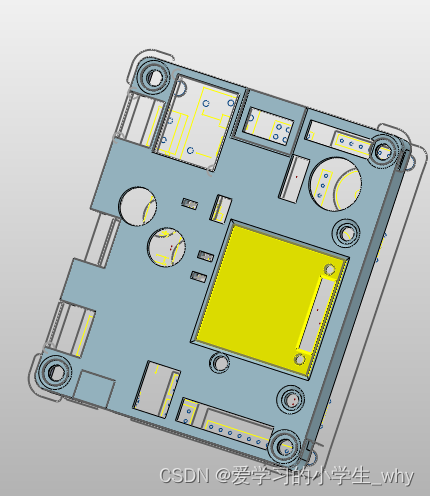
差不多就是这样吧!!!
后面如果有智能家居新成员加入再为他们量身定做战衣。
板子也画好了,验证没啥问题了后面的文章就直接上代码了。有需要的也可以去咸鱼看看,链接放下面了。
复制括号里面内容打开咸鱼就好了(闲鱼】https://m.tb.cn/h.Umlbr15?tk=YAJ9dTdbqOU CZ3457 「我在闲鱼发布了【stm32f103c8t6开发板;】」
点击链接直接打开)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)