Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
机器学习西瓜书学习记录-第六章 支持向量机
2023-05-16
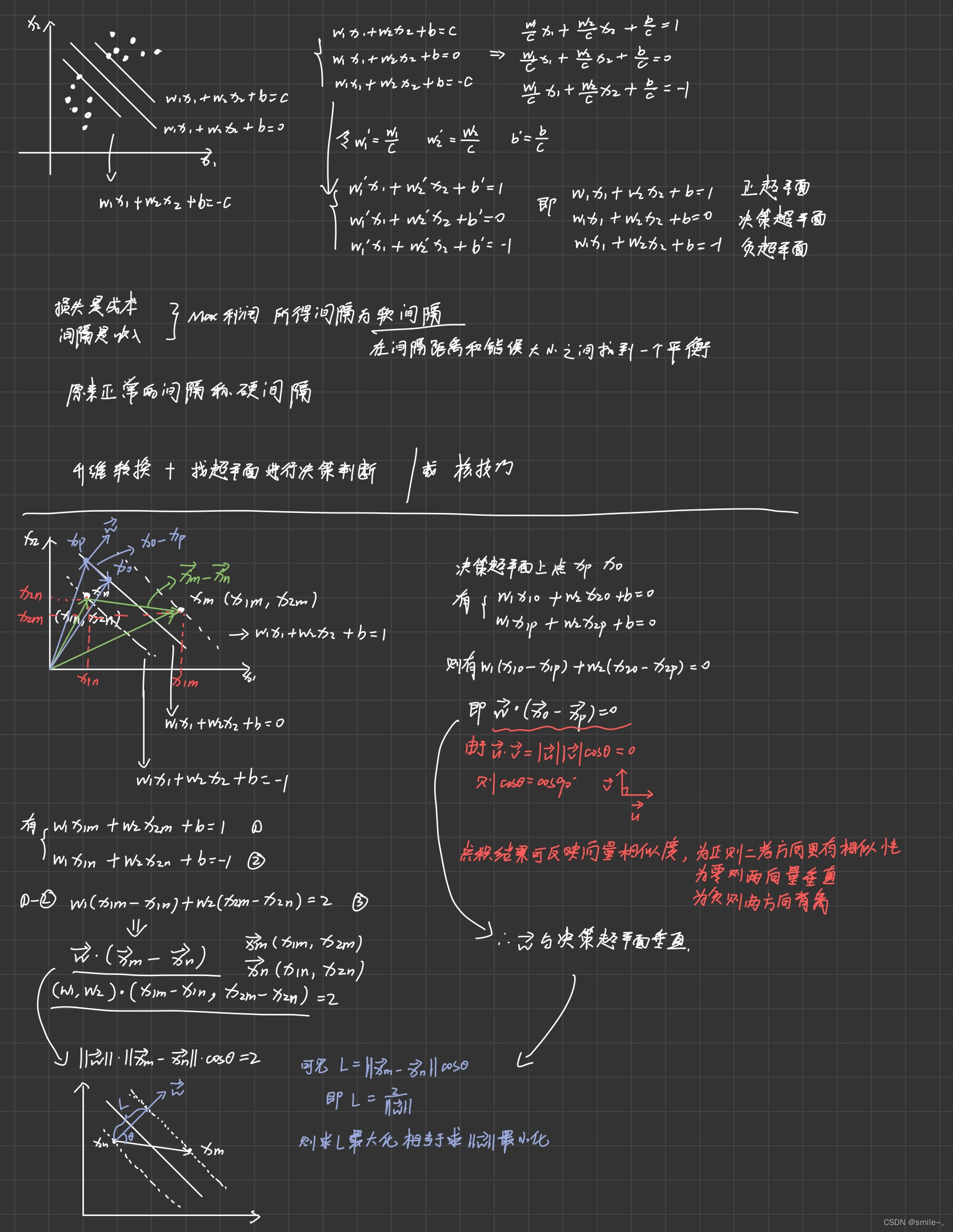
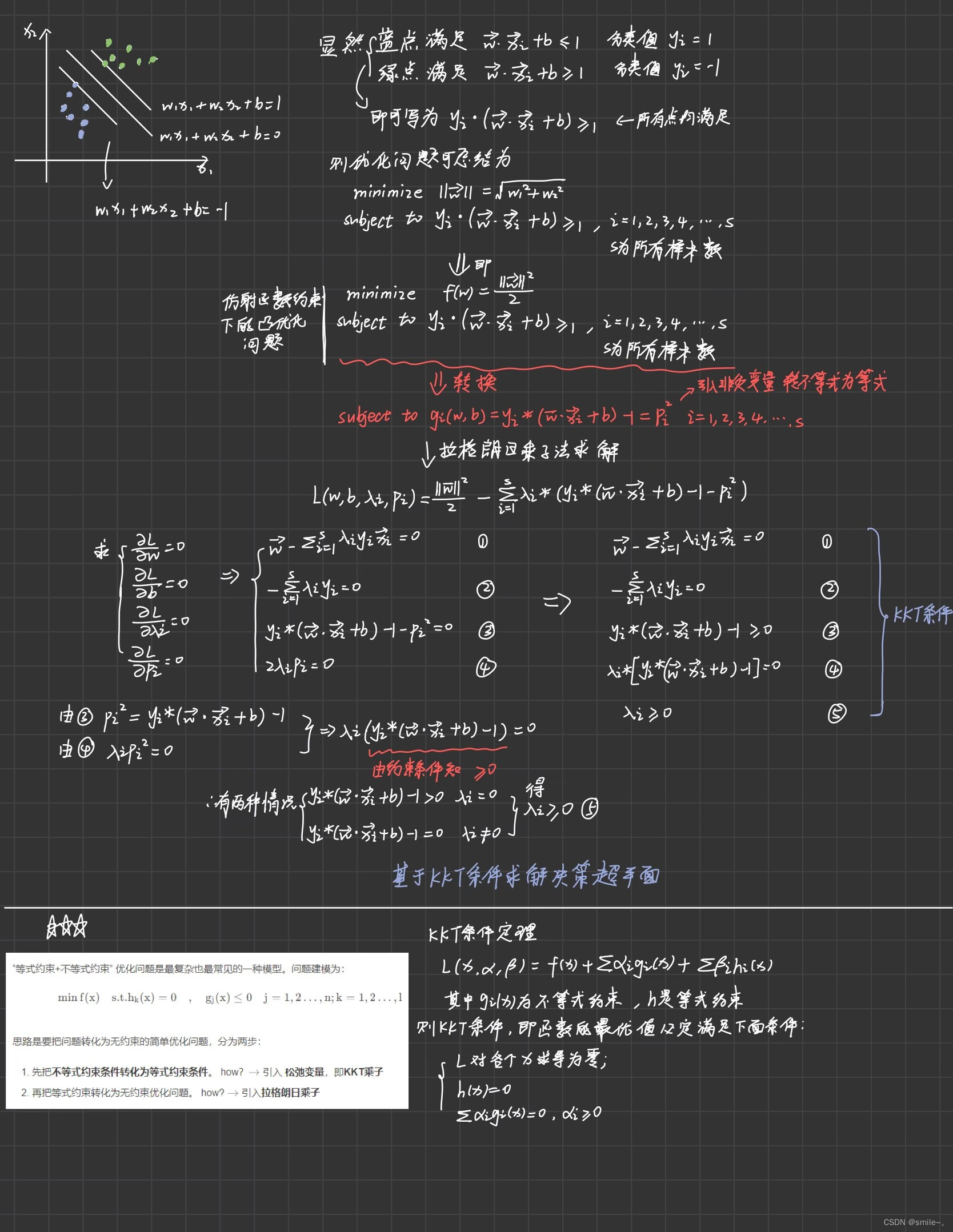
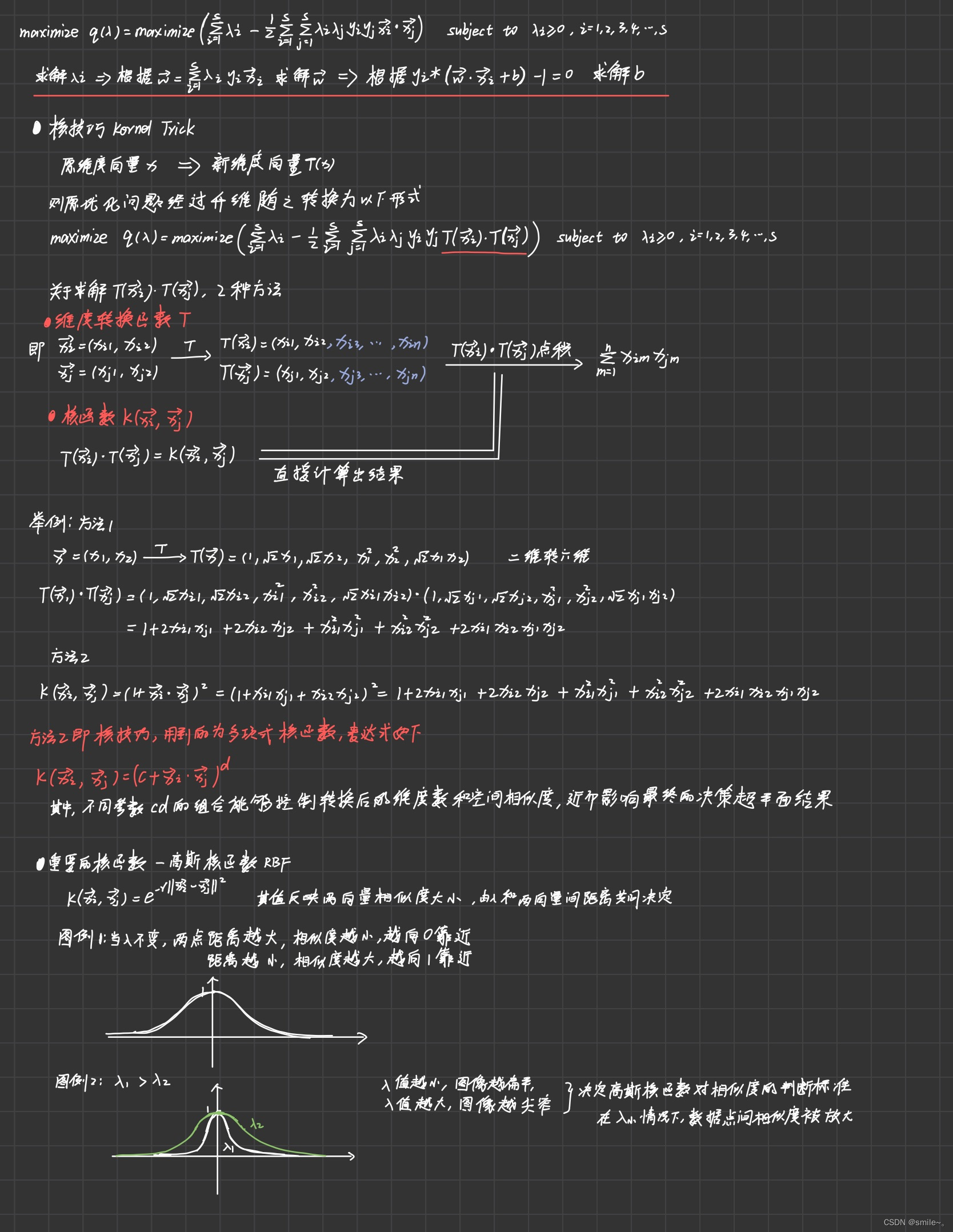
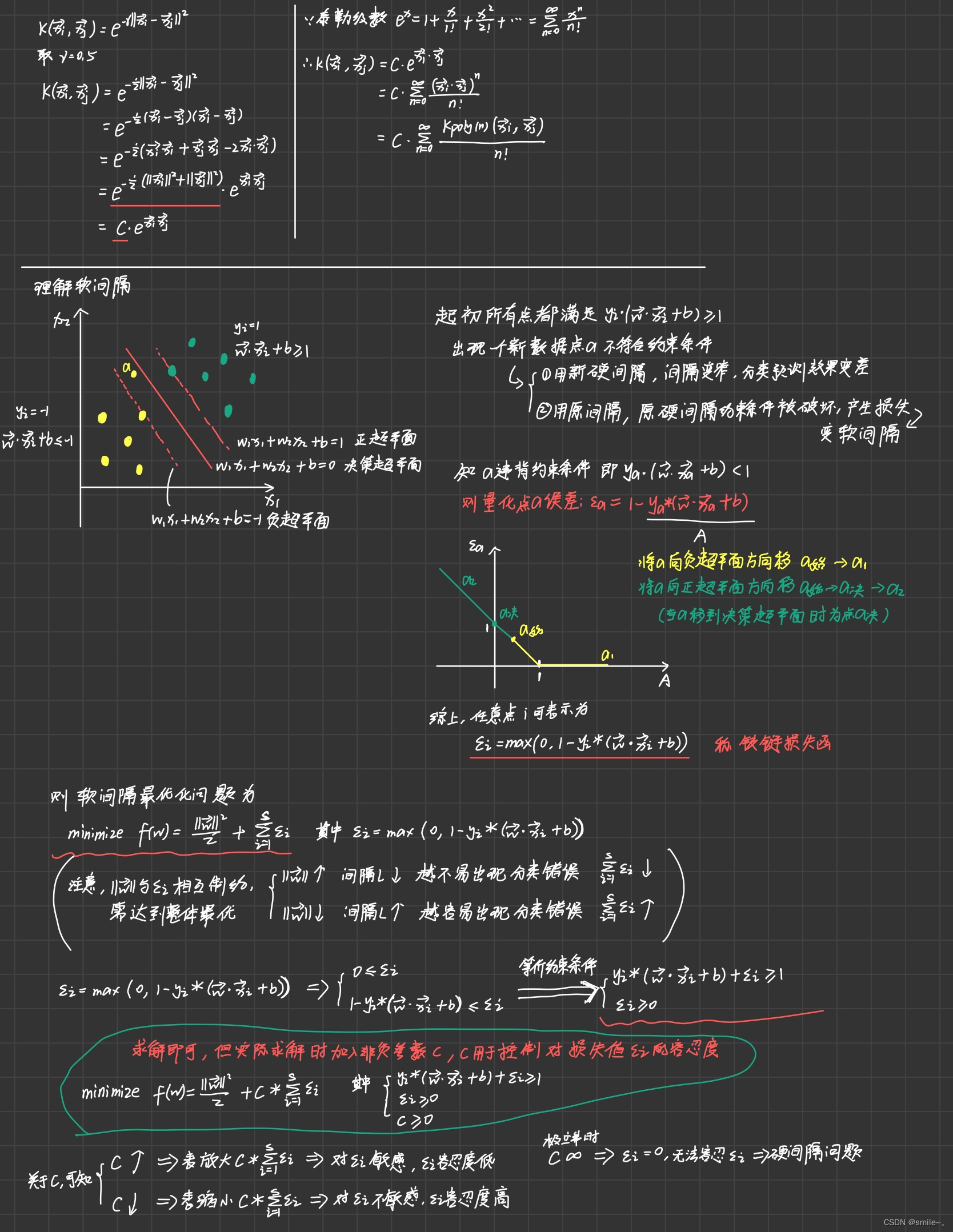
第6章 支持向量机
移步b站学习
学习贴
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
机器学习西瓜书学习记录-第六章 支持向量机 的相关文章
将文件中的单词及翻译导入数据库
include lt stdio h gt include lt sqlite3 h gt include lt stdlib h gt include lt string h gt int do insert sqlite3 db cha
项目:电子词典
电子词典 项目要求 xff1a 登录注册功能 xff0c 不能重复登录 xff0c 重复注册 单词查询功能 历史记录功能 xff0c 存储单词 xff0c 意思 xff0c 以及查询时间 基于TCP xff0c 支持多客户端连接 采用数据库
使用C语言实现LED1/LED2/LED3灯点亮
gpio h文件 ifndef GPIO H define GPIO H 封装RCC寄存器 define RCC volatile unsigned int 0x50000A28 封装GPIO寄存器 typedef struct volat
通过串口收发一个字符、字符串
1 通过串口收发一个字符 2 通过串口收发一个字符串 uart4 h文件 ifndef UART4 H define UART4 H include 34 stm32mp1xx rcc h 34 include 34 stm32mp1xx
编写驱动,实现应用层自由控制哪个数码管显示及显示内容
驱动程序 xff1a include lt linux init h gt include lt linux module h gt include lt linux spi spi h gt int major char kbuf 128
编写一个函数,要求输入任意两个无符号32位整形数,在控制台打印两个数相加的结果,要求禁止使用64位变量。
include lt stdio h gt void add unsigned int x unsigned int y unsigned int xh 61 0 xl 61 0 yh 61 0 yl 61 0 sumh 61 0 suml
员工管理系统
头文件common h ifndef COMMON H define COMMON H include lt stdio h gt include lt stdlib h gt include lt sys types h gt inclu
gradle 插件开发踩坑记,应用插件时总是报 UnknownPluginException 异常
问题描述 引用一个本地开发的 gradle 插件时 xff0c 一直找不到这个插件 ID xff0c 报错 xff1a Caused by org gradle api plugins UnknownPluginException Plug
初学FreeRTOS实现多任务程序
初学FreeRTOS实现多任务程序 1 什么是FreeRTOS2 STM32下FreeRTOS移植2 1 准备工作2 2 移植更改2 2 1 新建分组2 2 2 添加相应的头文件路径2 2 3 修改 SYSTEM 文件 3 多任务程序的实现
【计网+go】如何获取完整的报文?
我们想要获取完整的报文 xff0c 首先得知道消息的长度和起始位置然后来读取 通常有以下几种方法 使用带消息头的协议 头部写入包长度 xff0c 然后再读取包内容 设置定长消息 xff0c 每次读取定长内容 xff0c 长度不够时空位补固定
Visual Studio 2022下载安装
Visual Studio 2022下载安装 1 进入官网 官网地址 xff1a https visualstudio microsoft com 这里以Windows操作系统为例 根据需要选择版本 xff0c 我这里下载的是Enterpr
Lighttpd入门教程
Lighttpd入门教程 概述入门教程安装配置静态文件服务动态文件服务 虚拟主机SSL启动服务器日志模块总结lighthttpd使用场景和原理使用场景原理 概述 Lighttpd xff08 也称为轻量级HTTP服务器 xff09 是一款快
5.OSD叠加学习之在YUV图片上显示 竖线横线斜线
目录 实现效果图 实现思路 xff1a 代码编写 实现效果图 实现思路 xff1a 无论是显示 竖线横线还是斜线 xff0c 无非是对 多个连续的 像素点进行操作 xff0c 明白了一个像素点如何点亮 xff0c 加个循环偏移量 xff0c
shell脚本发送http请求
简述 xff1a 使用shell脚本发送http请求 xff0c 解析请求获取token再次发起请求 系统 xff1a ubuntu系统 工具 xff1a cURL 发送http请求 xff0c jq 解析json xff0c 没有需要安装
2020年电赛省赛题目A——无线运动传感器节点设计
无线运动传感器节点设计 题目要求设计方案分析心电检测模块方案ADS1292的A D转换计算心电信号的处理体表温度分析计算运动量分析计算无线传输模块设计显示屏的设计电路设计温度模块设计加速度计模块设计无线传输模块设计PCB布线布局 题目要求
【全志T113-S3_100ask】8-USB串口获取GPS数据(含解析)
全志T113 S3 100ask 8 USB串口获取GPS数据 xff08 含解析 xff09 背景 xff08 一 xff09 USB串口驱动 xff08 二 xff09 驱动加载 xff08 三 xff09 简单读取串口数据 xff08
Java ---JVM栈的存储结构与运行原理
目录 一 栈中存储结构 二 栈运行原理 一 栈中存储结构 1 每个线程都有自己的栈 xff0c 栈中的数据都是以栈帧 Stack Frame 的格式存在 2 在这个线程上正在执行的每个方法都各自对应一个栈帧 3 栈帧是一个内存区块 xff0
c++配置opencv环境
c 43 43 配置opencv环境 环境 xff1a 系统 xff1a win10系统截至20190523版本 opencv版本 xff1a 3 4 6版本 教程 xff1a 1 下载opencv安装包 xff0c 由于4 0 1版本会出
Android应用安全解决方案
前言 防止第三方反编译篡改应用 xff0c 防止数据隐私泄露 xff0c 防止二次打包欺骗用户 1 一些必要的基础知识 我们在加密的时候会用到一些加密或者编码方法 常见的有 xff0c 非对称加密算法 RSA 等 xff1b 对称加密算法
win10修改系统配置处理器引导参数后,系统无限蓝屏解决办法
win10修改系统配置处理器引导参数后 xff0c 系统无限蓝屏解决办法 0 xff1a 开机时先按f8进入安全模式 xff0c 在进入命令提示符 1 进入 启动修复 的 命令提示符 xff08 最好是使用有管理员权限的 xff0c 不过普
随机推荐
运行内存变成的2G,为硬件保留内存为6G
运行内存变成的2G xff0c 为硬件保留内存为6G 先看设置中下面是否有设置是否激活windows xff0c 如有点进去 xff0c 有疑难解疑下面 xff0c 点入会自动激活windows xff0c 如盗版就不行 xff0c 激活后
ubuntu20.4安装NVIDIA驱动,cuda
安装NVIDIA驱动准备工作 下载NVIDIA地址 xff1a https www nvidia cn Download index aspx lang 61 cn 查看是否安装好驱动命令 xff1a nvidia span class t
图像进行反转:白变黑,黑变白
图像进行反转 xff1a 白变黑 xff0c 黑变白 二值图对图像进行反转 span class token keyword import span cv2 img span class token operator 61 span spa
python调用相机和双目相机
python调用相机 span class token keyword import span cv2 span class token keyword import span numpy span class token keyword
安装PCL1.9.1其它版本号Python3.6+PCL1.9.1+VS2017+gtkbundle_3.6.4版本
下载 python pcl文件 地址 xff1a https github com strawlab python pcl 安装 VS2017 安装PLC1 91 首先在自己电脑上安装PCL xff08 点击这里 xff09 xff0c 这
ROS--机器人小车仿真rviz
URDF练习 需求描述 创建一个四轮圆柱状机器人模型 xff0c 机器人参数如下 底盘为圆柱状 xff0c 半径 10cm xff0c 高 8cm xff0c 四轮由两个驱动轮和两个万向支撑轮组成 xff0c 两个驱动轮半径为 3 25cm
ROS--URDF集成Gazebo仿真小车和rviz结合
ROS URDF集成Gazebo仿真小车 实现流程 需要编写封装惯性矩阵算法的 xacro 文件 为机器人模型中的每一个 link 添加 collision 和 inertial 标签 xff0c 并且重置颜色属性 在 launch 文件中
使用D435i深度相机运行ORB-SLAM3
下载安装链接 下载ORB SLAM3地址 xff1a git clone https github com UZ SLAMLab ORB SLAM3 git eigen3多版本安装 xff1a https blog csdn net wei
keil5使用一个父工程打开多个子工程文件
1 首先工程文件需要在同样的文件夹里 2 打开keil5 xff0c 选择Project New Multi Project Workspace 3 将工程文件建立在刚刚的总文件夹里面 xff0c 命名保存 4 弹出此页面 xff08 Cr
Android动态加载so!这一篇就够了!
作者 xff1a Pika 链接 xff1a https juejin cn post 7107958280097366030 对于一个普通的android应用来说 xff0c so库的占比通常都是巨高不下的 xff0c 因为我们无可避免的
HTTP是什么
HTTP是什么 HTTP是什么 HTTP协议是Hyper Text Transfer Protocol xff08 超文本传输协议 xff09 的缩写 是用于从万维网 xff08 WWW World Wide Web xff09 服务器传输
error: array has incomplete element type ‘char []‘
原代码 xff1a void explain input char int char a 报错 xff1a error array has incomplete element type 39 char 39 原因 xff1a 可以用二维数
STM32串口接收十六进制数转为十进制数(包含负数)
外部设备传输给STM32单片机十六进制数 例如0x09c4 代表2500 0xff38 代表 200 xff08 并不是65336 xff0c 因为这是有符号的 xff09 串口接收处理函数 接收到 5A A5 06 83 55 00 01
无人机-3无人机ROS应用与开发
一 ROS是什么 二 为什么要学习ROS 三 怎么学习ROS https www cnblogs com masbay p 10745170 html TF坐标系指机器人在现实世界会有坐标的变换 xff0c ROS已经将其算成固定的程序 x
ROS入门-4.安装ROS系统(ubuntu20.04版本安装ros的noetic版本)
ubuntu20 04版本安装ros的noetic版本 1 添加软件源2 添加密钥3 更新4 安装ROS5 初始化rosdep6 设置环境变量7 测试ROS安装是否成功 1 添加软件源 2 添加密钥 3 更新 4 安装ROS 5 初始化ro
数学建模-12.预测模型
灰色预测 灰色系统 GM 1 1 模型 xff1a Grey Model GM 1 1 原理介绍 呢么 xff0c 准指数规律的检验 xff1f 发展系数 a 与预测情形的探究 发展系数越小预测的越精确 GM 1 1 模型的评价 在使用GM
数学建模-数学规划模型
数学规划模型 一 概述 1 什么是数学规划 xff1f 运筹学的一个分支 xff0c 用来研究在给定条件下 即约束条件 xff0c 如何按照某一衡量指标 xff08 目标函数 xff09 来寻求计划 管理工作中的最优方案 即求目标函数在一定
机器学习西瓜书学习记录-第四章 决策树
第4章 决策树 4 1基本流程 决策树 xff0c 一类常见机器学习方法 xff0c 希望从给定训练集学得一个模型用以对新示例进行分类 一般 xff0c 一棵决策树包含一个根结点 若干个内部结点和若干个叶结点 xff1b 叶结点对应于决策结
机器学习西瓜书学习记录-第五章 神经网络
第5章 神经网络 5 1神经元模型 神经网络中最基本的成分是神经元模型 M P神经元模型 xff0c 又称 阈值逻辑单元 在模型中 xff0c 神经元接收到来自n个其他神经元传递过来的输入信号 xff0c 这些输入信号通过带权重的连接进行传
机器学习西瓜书学习记录-第六章 支持向量机
第6章 支持向量机 移步b站学习 学习贴
热门标签
weighted
textkit
senchacmd
netbeans69
hardlink
awssam
vselect
sharpdx
onkeyup