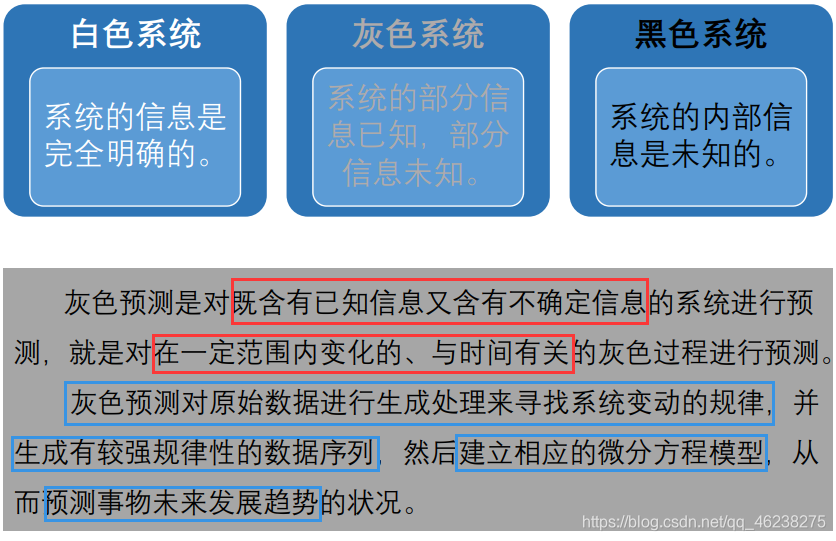
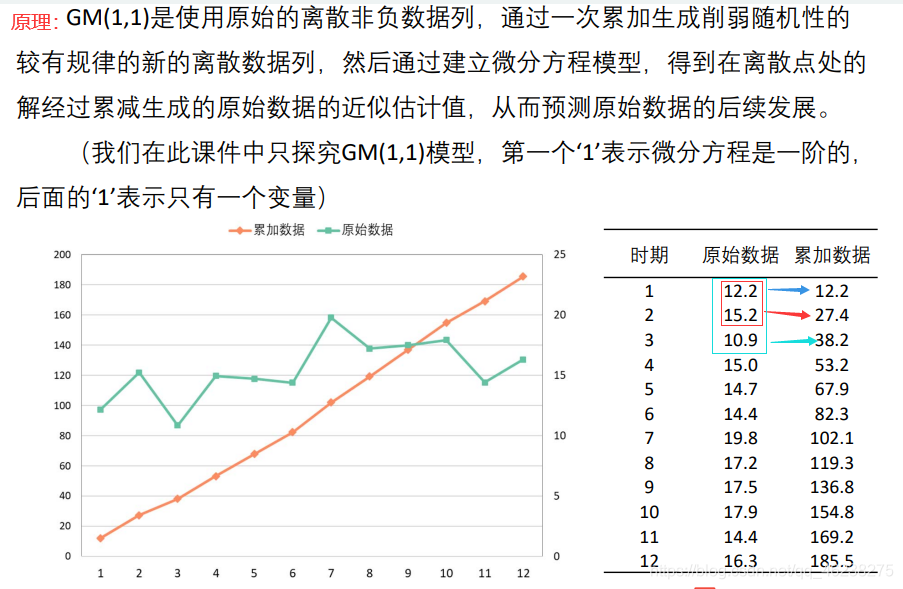
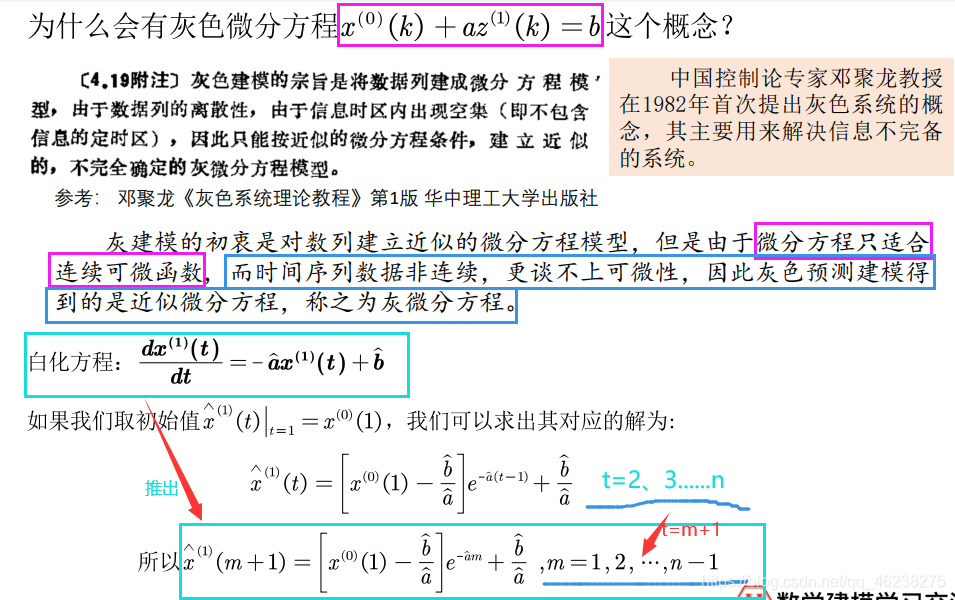
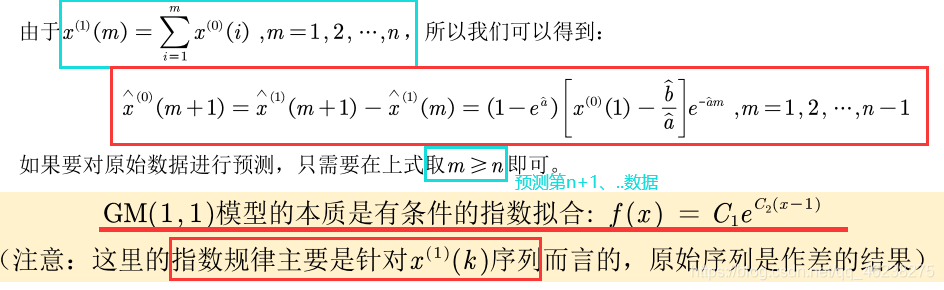
灰色系统 GM(1,1)模型:Grey Model GM(1,1)原理介绍
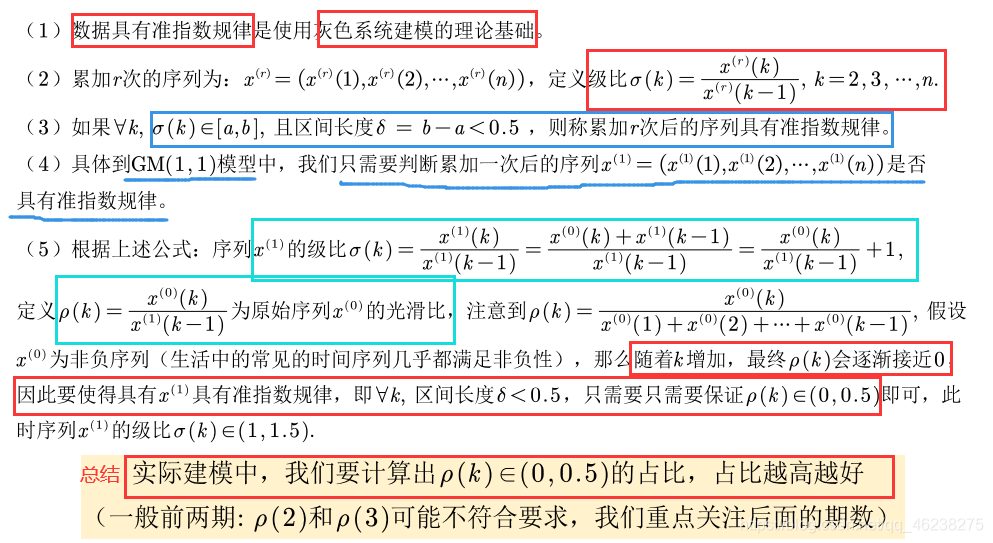
呢么,准指数规律的检验? 发展系数(-a)与预测情形的探究 发展系数越小预测的越精确 GM(1,1)模型的评价
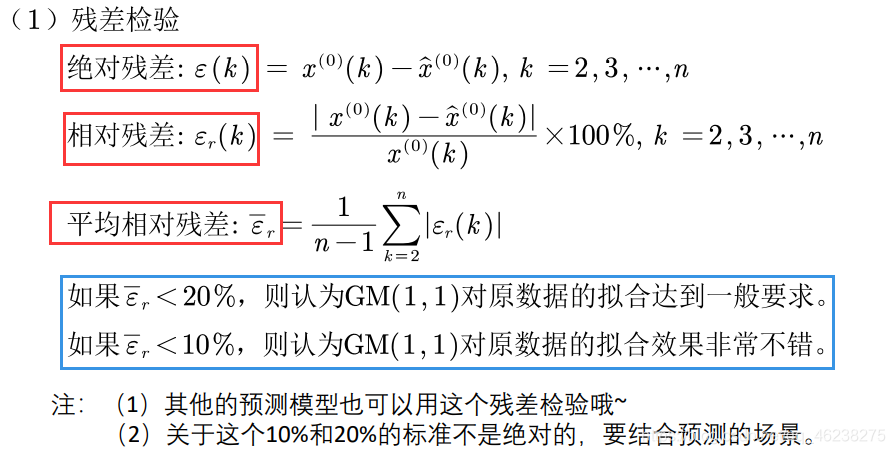
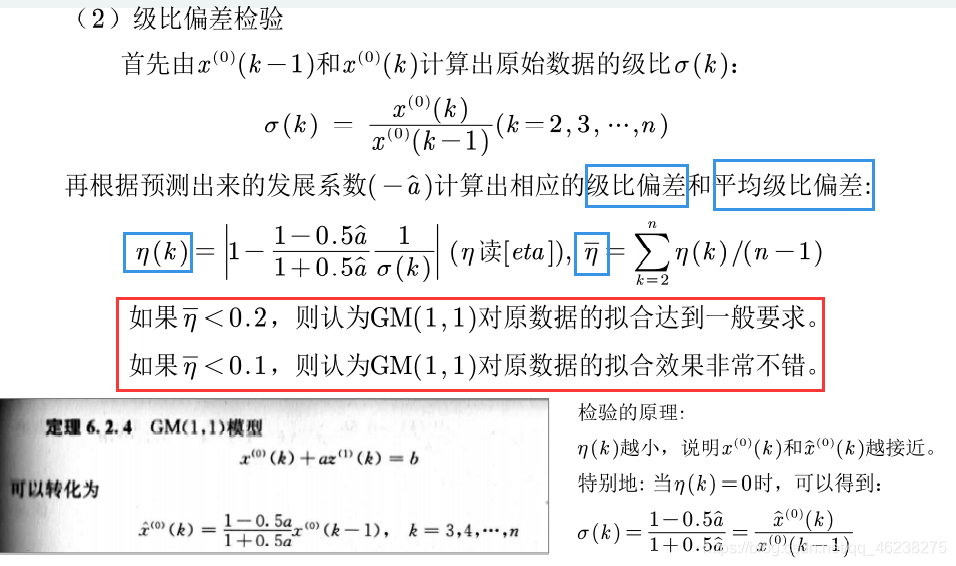
在使用GM(1,1)模型对未来的数据进行预测时,我们需要先检验GM(1,1)模型原数据的拟合程度 一般两种方法:残差检验 级比偏差检验
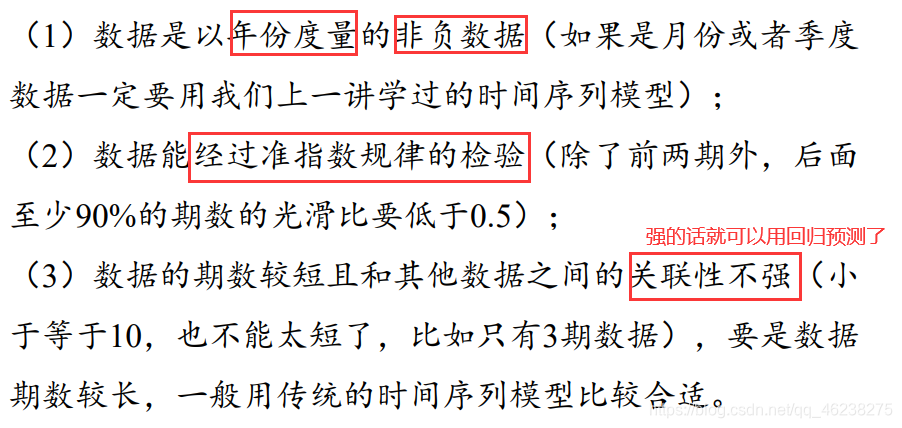
使用灰色预测的情况