一.概念部分
1.什么是二分图?
通俗的说法:就是可以把图分成两部分,每一部分任意两点之间没有关系(同一部落),两部分之间点可能存在多种关系。
2.怎么判断二分图?
(1)理论判定:如果某个图为二分图,那么它至少有两个顶点,且其所有回路的长度均为偶数,任何无回路的的图均是二分图。
如图:
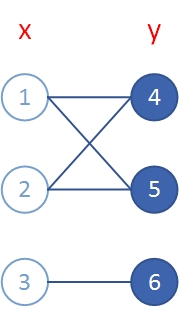

二分图 非二分图
(2)代码判断:利用染色法,用两种颜色对图染色,若能全部染色没有冲突则为二分图
代码:
3.二分图最大匹配问题:
现在有了二分图,我们来想,假如两部分ab之间的边表示A部分的a可以和B部分的b进行配对,并且每个人只能匹配一个人,那么怎么能在不产生冲突的条件下,匹配最多的对数呢?
二.算法部分
1.匈牙利算法解决二分图最大匹配问题
(1):https://blog.csdn.net/dark_scope/article/details/8880547
(2)实质:先到先得,能让就让; 寻找增广路;
(3)增广路径的性质:
有奇数条边。
起点在二分图的左半边,终点在右半边。
路径上的点一定是一个在左半边,一个在右半边,交替出现。(其实二分图的性质就决定了这一点,因为二分图同一边的点之间没有边相连,不要忘记哦。)
整条路径上没有重复的点。
起点和终点都是目前还没有配对的点,而其它所有点都是已经配好对的。
路径上的所有第奇数条边都不在原匹配中,所有第偶数条边都出现在原匹配中。
最后,也是最重要的一条,把增广路径上的所有第奇数条边加入到原匹配中去,并把增广路径中的所有第偶数条边从原匹配中删除(这个操作称为增广路径的取反),则新的匹配数就比原匹配数增加了1个。
(4)复杂度:O(m*n)
(5)代码:HDU 2063
#include <iostream>
#include<bits/stdc++.h>
using namespace std;
const int maxn = 1000 + 7;
bool used[maxn];
int Maching[maxn],k,n,m,tot,head[maxn];
struct Edge{
int to,next;
}edge[maxn*2];
void addEdge(int a,int b){
edge[tot].to = b;edge[tot].next = head[a];head[a] = tot++;
}
void init(){
tot = 0;
memset(head,-1,sizeof(head));
memset(Maching,-1,sizeof(Maching));
}
bool DFS(int p){
for(int i = head[p];~i;i = edge[i].next){
int to = edge[i].to;
if(!used[to]){//每试图让过
used[to] = 1;//让一次
if(Maching[to]==-1||DFS(Maching[to])){//没配对过/配对了但是可以让出来
Maching[p] = to;Maching[to] = p;//配对成功
return true;
}
}
}
return false;
}
int Hungary(int len){
int sum = 0;
for(int i = 1;i<=len;i++){//试图配对每一个左部分点
memset(used,0,sizeof(used));
if(DFS(i))sum++;//配对成功
}
return sum;
}
int main()
{
while(scanf("%d",&k)!=EOF&&k){
init();
scanf("%d%d",&m,&n);
for(int i = 0;i<k;i++){//k对
int a,b;
scanf("%d%d",&a,&b);//左部分 --- 右部分
addEdge(a,m+b);//加边
}
int ans = Hungary(m);
printf("%d\n",ans);
}
return 0;
}
2.匈牙利的优化算法----Hopcroft-Karp(HK)算法
参考:https://blog.csdn.net/qq_39792342/article/details/82017123
(1)思想:在匈牙利中,我们每次匹配一个点,寻找一条增广路,很浪费。我们可以在一次匹配中利用BFS尝试寻找多条增广路,然后在寻找配对时,当dist[p] ==dist[x] + 1时,p才是x的下一个增广节点。
(2)做法:BFS找增广路 + DFS进行匹配
(3)代码:HDU - 2389
#include <iostream>
#include<bits/stdc++.h>
using namespace std;
#define INF 0x3f3f3f3f
const int maxn = 4000 + 7;
struct Node{
int x,y,speed;
}node[maxn*2];
int n,m,dist[maxn*2],Maching[maxn*2];
vector<int>G[maxn];
int Length(int p,int q){
return (node[p].x - node[q].x)*(node[p].x - node[q].x) + (node[p].y - node[q].y)*(node[p].y - node[q].y);
}
bool BFS(){//寻找增广路
memset(dist,-1,sizeof(dist));
queue<int> que;
for(int i = 1;i<=m;i++){
if(Maching[i]==-1){que.push(i);dist[i] = 0;}
}
bool flag = false;
while(!que.empty()){
int p = que.front();
que.pop();
int len = G[p].size();
for(int i = 0;i<len;i++){
int to = G[p][i];
if(dist[to]==-1){
dist[to] = dist[p] + 1;
if(Maching[to]==-1)flag = true;
else {dist[Maching[to]] = dist[to] + 1;que.push(Maching[to]);}
}
}
}
return flag;
}
bool DFS(int p){//搜索匹配
int len = G[p].size();
for(int i = 0;i<len;i++){
int to = G[p][i];
if(dist[to]==dist[p] + 1){
dist[to] = -1;
if(Maching[to]==-1||DFS(Maching[to])){
Maching[to] = p;
Maching[p] = to;
return true;
}
}
}
return false;
}
inline int HK(){
int cnt = 0;
while(BFS()){
for(int i = 1;i<=m;i++){
if(Maching[i]==-1&&DFS(i))cnt++;
}
}
return cnt;
}
int main()
{
int T;
scanf("%d",&T);
int kase = 0;
while(T--){
int t;
memset(Maching,-1,sizeof(Maching));
scanf("%d",&t);
scanf("%d",&m);
for(int i = 1;i<=m;i++){
G[i].clear();
scanf("%d%d%d",&node[i].x,&node[i].y,&node[i].speed);
}
scanf("%d",&n);
for(int j = m+1;j<=m+n;j++){
scanf("%d%d",&node[j].x,&node[j].y);
for(int k = 1;k<=m;k++){
int time = Length(k,j);
if(time<=node[k].speed*node[k].speed*t*t)G[k].push_back(j);
}
}
int ans = HK();
printf("Scenario #%d:\n%d\n\n",++kase,ans);
}
return 0;
}
三.拓展部分:
1.二分图完美匹配:如果左侧部分的所有点都能够匹配,完美匹配一定是最大匹配(完美匹配的任何一个点都已经匹配,添加一条新的匹配边一定会与已有的匹配边冲突)。但并非每个图都存在完美匹配。且 最大匹配不一定是完美匹配。
解决:求最大匹配,若最大匹配数==所有点数则为完美匹配
2.二分图的最小点覆盖:最小顶点覆盖:实质是个点集,点集里面的点能覆盖所有的边,最小顶点覆盖就是满足这个要求的点集中点数最小的那个。
解决:二分图的最小点覆盖 = 二分图最大匹配数
3.二分图最大独立集:实质是个点集,这个集合里的点无论怎样都两两相连不到一起,满足这个要求的点数最多的一个。也就是集合里任意两点之间无关系。
解决:二分图最大独立集 = 节点数(n)- 最大匹配数;