过年期间闲来无事,对PWM整流器进行了一点了解,然后用Simulink搭建了一个PWM整流器的模型。现在对这个过程进行归纳,希望对大家有帮助。 首先贴出三相PWM整流器的电路简图如下图。其中V1、V2、V3是三相电源,对应实际的三相电;L1、L2、L3是整流器前端的三相电抗器;R1、R2、R3其实可以看作是三路线路上总的电阻(电缆的电阻、电抗器的电阻等等);Q1-6、D1-6则构成了三相IGBT桥,它也是我们需要控制的核心;最后的C1是直流母线的滤波电容。
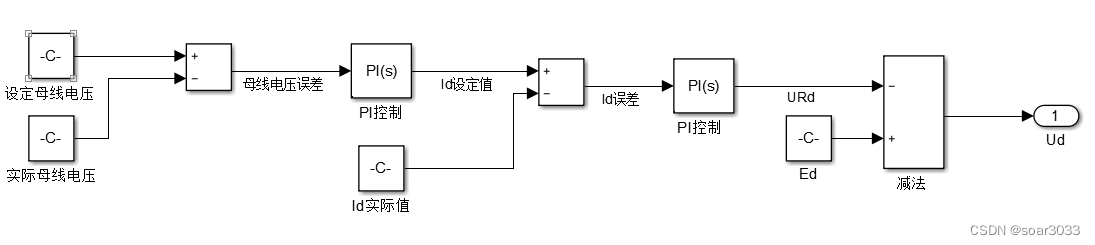
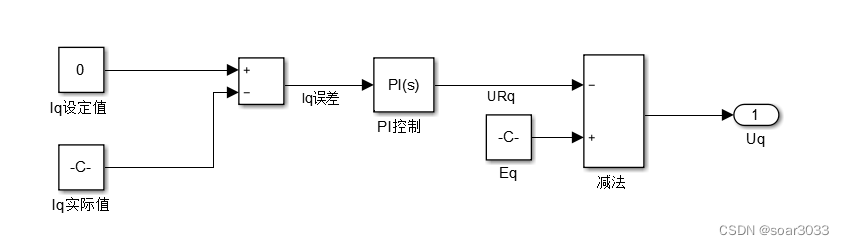
PWM整流的原理在网上已经有太多的解释了。但是往往都比较复杂,我们不妨以最简单的逻辑去解释(结合下图,为了简便分析,我们只看其中的一相电路,其中假设U1>0)。 现在我们列出下图电压的等式,显然有U1=UL1+UR1+Ua。 一般的,UL1是比较小的,假设电感为1mH,I1为10A,这时UL1=2pifL10=23.14500.00110=3.14V。相较直流母线几百伏的电压,相较电网几百伏的电压来说,UL1是很小的,如果在设计模型时忽略它只会造成很小的误差,并且控制模型中的所以在此我们忽略UL1的存在。这样一来电压的等式就变成了U1=UR1+Ua。 而在实际控制时,我们并非按照每相进行解算,而是像控制PMSM一样把电压和电流都分解到DQ轴再进行解算。此时,电压等式就变成了Ed=URd+Ud、Eq=URq+Uq。其中E是电网电压,UR是电阻电压,U是IGBT桥逆变出的电压。 当直流母线电压降低低于设定的母线电压时,我们希望电网对我们的母线进行充电,也就是希望Id>0,并且母线电压低的越多Id就应该越大。而要Id增大,显然就需要R两端的电压URd增大。而根据公式Ed=URd+Ud,我们想让URd增大可以通过控制IGBT桥的逆变,使Ud减小。 上述的逻辑可以归纳为:(直流母线电压设定值-Udc)减小→Id增大→URd增大→Ud=Ed-URd减小。根据这个逻辑,我们可以搭建出一个控制流如下图。 同理也可以将Uq的控制逻辑做出下图。 这就是PWM整流的核心逻辑,有了核心逻辑,我们只需要将Id、Iq、Ed、Eq、实际母线电压测量出来输入到控制逻辑,然后使用计算出的Ud、Uq对IGBT桥进行对应的开关控制就可以了。
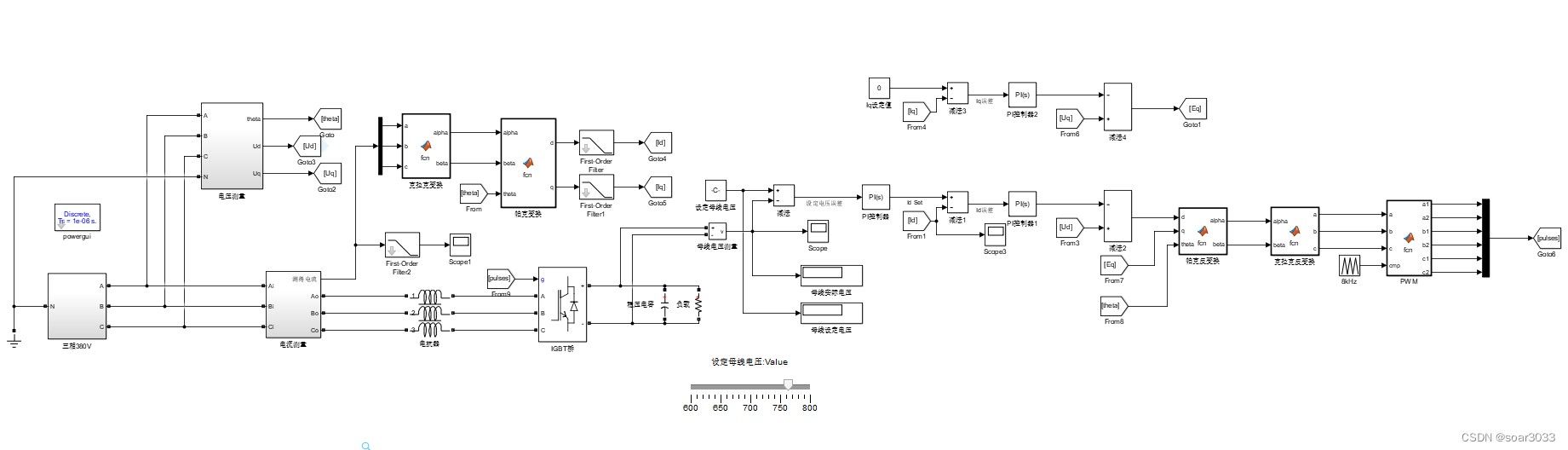
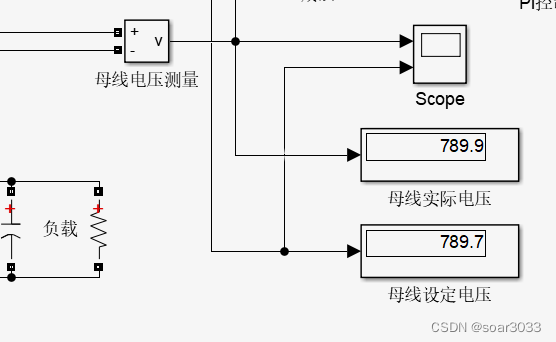
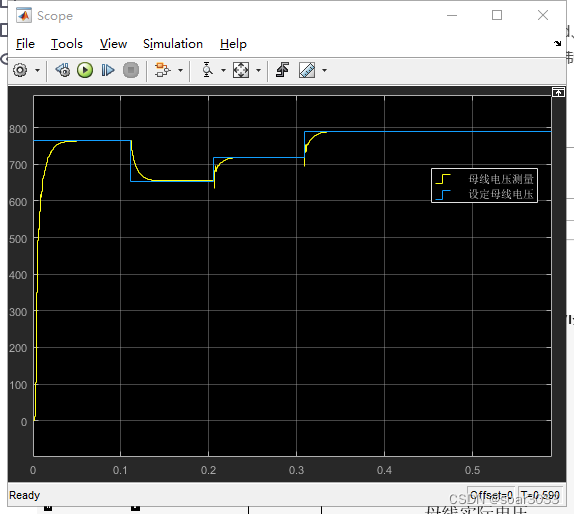
将整个模型搭建完备后的SImulink模型如下图。 我们试着运行模型,可以看到母线电压在0.1秒的时间内就已经和设定的母线电压非常接近了。 我们继续尝试不断更改设定的母线电压,可以发现,每次更改母线电压的设定值后,模型都可以调整直流母线电压变为新设定的电压值。可见我们的模型达到了设计目的。
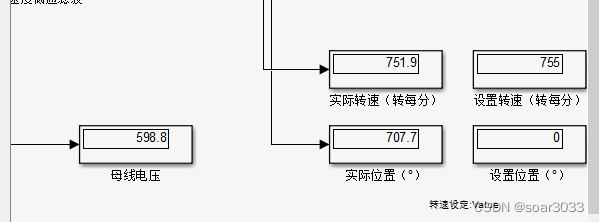
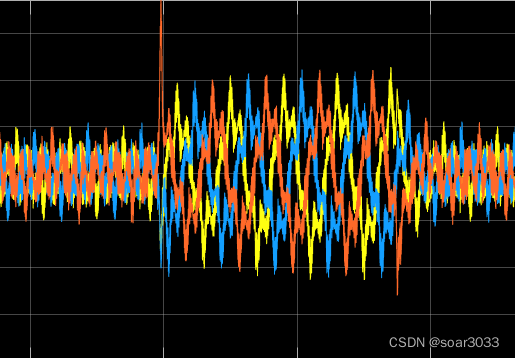
然后我们将PWM整流与之前文章中的伺服三环控制模型相结合,并实际运行测试。可以发现在伺服驱动电机进行运行的时候母线电压基本保持稳定。 而对整流器的三相输入电流进行监控我们可以看出,在电机进行加速的过程中三相输入电流变大了。而当电机速度稳定后输入电流又变小了,完全符合预期。
三相PWM整流器Simulink模型 伺服三环控制和三相PWM整流结合模型