evo官方指南
参考博客
<官方手册+这篇参考博客,完全可以掌握evo的基本操作>
Then----实践出真知:
1、 安装evo
sudo apt install python-pip
pip install evo --upgrade --no-binary evo
出现问题,但是也给出了参考解决办法
pip install evo --upgrade --no-binary evo --user
在安装过程中还出现了别的问题,但是没有记录,重启终端后解决。
2、使用
2.1、evo_traj单轨迹
cd ~/test_evo
evo_traj euroc data.csv --plot
2.2 evo_traj多轨迹
2.2.1、数据集格式转换
我使用的是EuRoc的MH_05数据集,需要将.csv文件形式的groundtruth转换为TUM形式的轨迹文件
evo_traj euroc data.csv --save_as_tum
格式转换参考: https://github.com/MichaelGrupp/evo/wiki/Formats
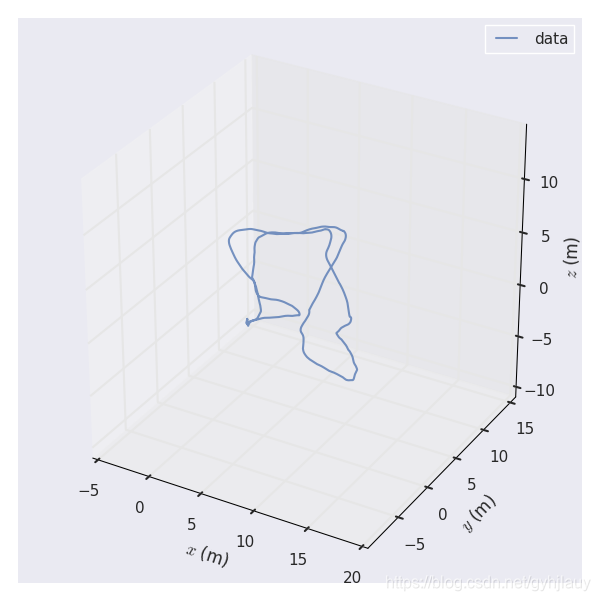
2.2.2、多轨迹显示(轨迹未对齐)
我通过测试程序得到TUM形式的轨迹文件:pose_output.txt。将轨迹文件放入同一个文件夹中(test_evo):
这里EVO提供了尺度校正自动对齐功能,TUM提供的工具需要手动输入:在命令后加-a 这里没有加,所以没有对齐
cd ~test_evo
evo_traj tum pose_output.txt --ref=data.tum -p --plot_mode xyz

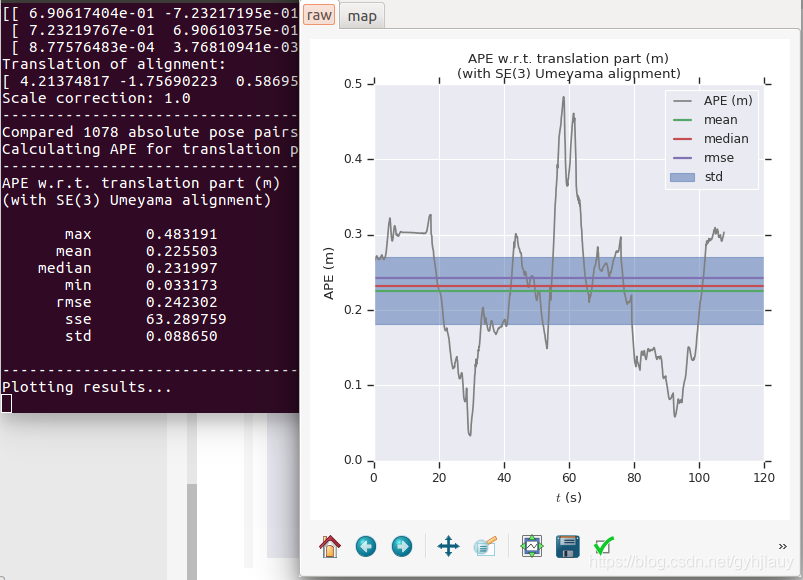
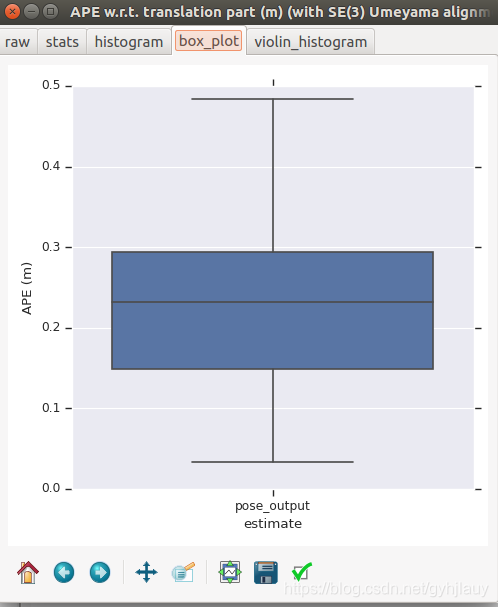
2.3、evo_ape(计算绝对位姿误差)
map中轨迹自动对齐
cd ~test_evo
mkdir results
evo_ape tum data.tum pose_output.txt -va --plot --plot_mode xyz --save_results results/ape.zip
这里只是计算平移误差,加-rfull为平移+旋转误差
https://blog.csdn.net/Yong_Qi2015/article/details/106110655
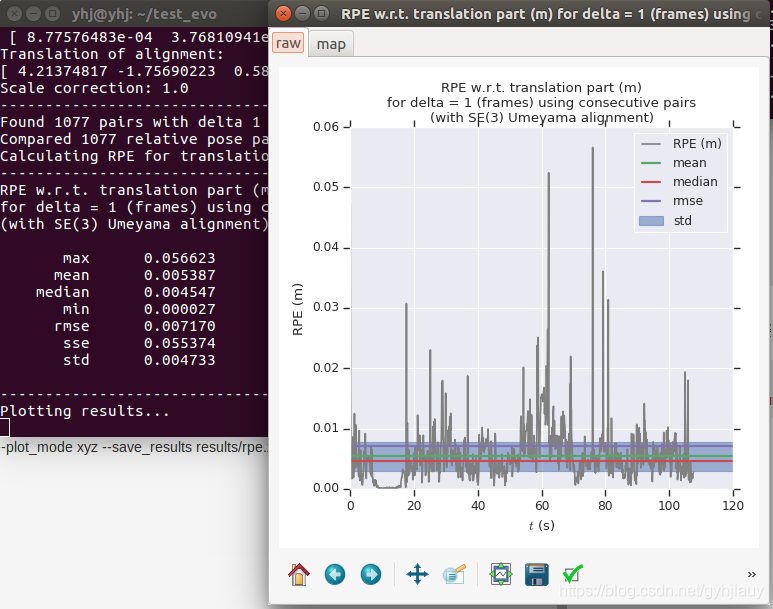
2.4、evo_rpe(计算相对位姿误差)
cd ~test_evo
evo_rpe tum data.tum pose_output.txt -va --plot --plot_mode xyz --save_results results/rpe.zip
2.5、evo_res(结果比较)
cd ~/test_evo/results
evo_res ape.zip -p --save_table table.csv
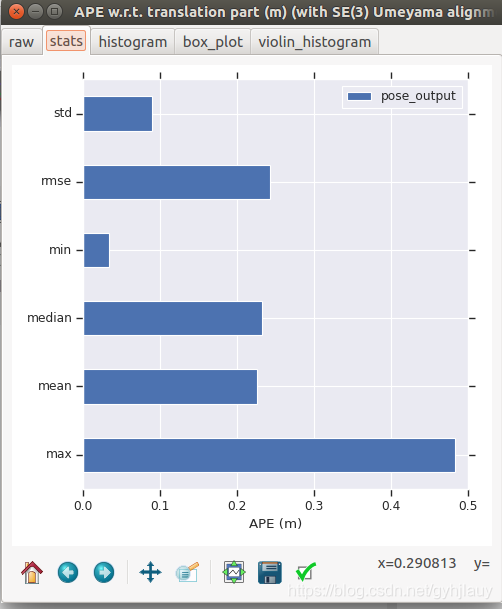
只有一个运行结果,所以看不出来对比结果。有多个结果比较时,参见 官网实例。